
Fターム[2F063GA52]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁電変換素子、磁気抵抗素子、ホール素子 (722)
Fターム[2F063GA52]の下位に属するFターム
Fターム[2F063GA52]に分類される特許
101 - 120 / 704
回転磁界センサ
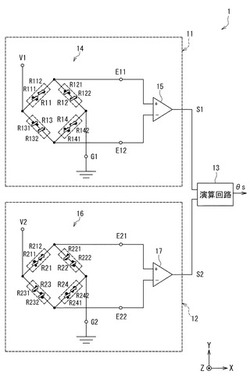
【課題】簡単な構成で、検出角度の誤差を低減できるようにする。
【解決手段】回転磁界センサ1は、検出回路11,12と、検出回路11,12の出力信号S1,S2に基づいて角度検出値を算出する演算回路13を備えている。検出回路11,12は、それぞれ、少なくとも1つのMR素子列を含んでいる。各MR素子列は、直列に接続された複数のMR素子によって構成されている。各MR素子は、磁化固定層と、自由層と、磁化固定層と自由層の間に配置された非磁性層とを有している。各MR素子列を構成する複数のMR素子の数は、2以上の偶数である。各MR素子列を構成する複数のMR素子は、MR素子の対を1つ以上含んでいる。対を構成する2つのMR素子における磁化固定層の磁化方向は、0°および180°を除く所定の相対角度をなしている。
(もっと読む)
回転角度検出装置

【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、小音化が図れ、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】上面中央に磁石5Aが装着された第一の検出歯車12の、下面中央に磁性体19を設け、第一の検出歯車12を下方へ付勢することによって、第一の検出歯車12の上下方向のがたつきがなくなるため、多少の振動や衝撃が加わっても衝突音の発生を防ぐことができ、小音化が図れ、確実な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】長い待機時間や複雑な調整作業を要することなくステアリングシャフトやモータの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、MR素子又はHall素子を有し、外部から間欠的に供給される電力による作動する。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】イグニション・オフ時においてもステアリングホイールの操舵角度に関連する情報を取得し続けることができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から供給される電力により作動するとともに外部から制御指令が送出された場合に角度情報取得手段で取得した情報を外部に出力するアングルセンサ10であって、制御指令が解除された場合に角度情報取得手段で取得した情報を記憶する記憶手段(集積回路12)を備える。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
歯車伝達装置用物理量測定装置
【課題】歯車伝達装置を構成する歯車4aの変位方向及び変位量を測定して、この歯車伝達装置が伝達するトルクの方向及び大きさを測定可能な構造を実現する。
【解決手段】1対のセンサ7a、7bの検出部を、はすば歯車であって他の歯車と噛合した前記歯車4aの外径側端部に形成した歯5aに対し、径方向及び軸方向に、それぞれ対向させる。この歯車4aは、トルク伝達に伴って軸方向に変位する。そして、前記センサ7a、7bの出力信号同士の間に存在する位相差が、前記歯車伝達機構が伝達するトルクの方向及び大きさにより変化する。そこで、この位相差に基づいて、このトルクを求める。
(もっと読む)
チェンジレバーの位置検出装置、これを備えたチェンジレバーユニット、およびチェンジレバーの位置検出方法
【課題】より簡単の構造でチェンジレバーの位置を精度よく検出する。
【解決手段】チェンジレバーのシフト方向の3つのレンジとチェンジレバーのセレクト方向の3つのレンジとにおけるマグネット2の磁気に対応して出力するホール素子3の電気的シフト位置信号値および電気的セレクト位置信号値をセンサ特性値としてホール素子のメモリに記録する。各レンジ間においては、ホール素子3は、隣接する電気的シフト位置信号値どうしを結ぶシフト側仮想直線および隣接する電気的セレクト位置信号値どうしを結ぶセレクト側仮想直線を用いてセンサ特性値として、ホール素子3の位置に対応した電気的シフト位置信号値および電気的セレクト位置信号値を補完出力する。これにより、種々のばらつきが生じていても、チェンジレバーの位置を精度よく検出可能となる。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
歪検知素子、および血圧センサ
【課題】 本発明の実施形態によれば、感度よく検知できる歪検知素子、および圧力セン
サを提供することができる。
【解決手段】 磁化方向が変化可能で外部歪が印加されていない状態では磁化が膜面垂
直方向を向いている磁化自由層と、磁化を有する参照層と、前記磁化自由層と前記参照層
との間に設けられたスペーサー層と、を備えた積層膜と、前記積層膜の積層面に対して垂
直方向に通電する一対の電極と、前記一対の電極の何れか一方に設けられた基板と、前記
基板が歪むと、前記磁化自由層の磁化の回転角度と前記参照層の磁化の回転角度が異なる
ことを特徴とする歪検知素子。
(もっと読む)
磁気検出素子及びこれを用いた回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる磁気検出素子及びこれを用いた回転角度検出装置に関し、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】略矩形状に配列された四つの磁気抵抗22A〜22Dの、対向する二つずつの磁気抵抗22Aと22B、磁気抵抗22Cと22Dを接続すると共に、この磁気抵抗22Cと22Dの両端に切換手段24Aと24Bを設けて磁気検出素子21を形成すると共に、これを磁石34や35に対向して配置し、制御手段37が磁気検出素子21の切換手段24Aと24Bを切換え、差動増幅手段27Aを介した磁気抵抗22からの複数の磁気信号を減算して、回転体31の回転角度を検出することによって、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
位置検出装置
【課題】 操作感覚に違和感を与えにくい位置検出装置を提供する。
【解決手段】 ハンドルバー2に設けられたハンドルグリップ3の回動動作に基づいて回動する被検出部4と、被検出部4を検出する検出部5と、被検出部4と検出部5とを収納するケース6とを備えた位置検出装置1において、被検出部4を構成するホルダ部材4aと、ホルダ部材4aを回動可能に支持するとともに検出部5を保持する支持部材7とを備え、ホルダ部材4aに支持部材7と摺動する第一の摺動部4dを設け、支持部材7に第一の摺動部4dと摺動する第二の摺動部76を設け、ホルダ部材4aに第一の摺動部4dと第二の摺動部76との摺動部分を覆うカバー部4eを設けたものである。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸が高速回転する状態での検出分解能及び測定精度の確保と、同じく低速回転する状態での応答性の確保との両立を図る。
【解決手段】演算器は、円周方向に隣り合う1対の凹溝10a、10bに基づいて発生する1対のパルス間の周期である部分周期δと、互いに異なる1対の被検出用特性変化組み合わせ部3a、3aに対応する1対のパルス間の周期である全周期Lとの比であるパルス周期比δ/Lに基づいて、前記主軸の軸方向変位量を求める。この主軸の回転速度が所定値よりも低い場合に、(A)に示す様に、前記全周期Lとして、円周方向に隣り合う1対の被検出用特性変化組み合わせ部3a、3aに関する値Laを採用する。これに対して、前記回転速度が前記所定値以上である場合に、(B)に示す様に、前記全周期Lとして、中間を飛ばして存在する1対の被検出用特性変化組み合わせ部3a、3aに関する値Lbを採用する。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる角度センサ、及びこれを用いた回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の中心を、回転体12の回転中心に設けて角度センサを形成すると共に、制御回路19が角度センサ18からの磁気に応じて、角度信号とスイッチング信号を出力することによって、プッシュスイッチ等の他の部品が不要となり、ブレーキペダル31への装着が容易に行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能なものを得ることができる。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
非破壊検査装置、非破壊検査方法
【課題】深さの異なる複数の欠陥が設けられたサンプルを用いることなく、検査対象物の傷の深さを測定できる非破壊検査装置を提供する。
【解決手段】一定の電流値の渦電流を検査対象物の表面に発生させるべく、周波数が高くなると振幅が小さくなる交流電流を励磁コイルに供給する電流供給部と、検査対象物の表面からの磁界を測定して磁界強度に応じた磁界信号を出力する磁気センサを有し、励磁コイルに第1周波数、第1周波数とは異なる第2周波数の交流電流を供給している際に、磁気センサから得られる検査対象物の表面に対して窪んだ傷の近傍の磁界強度に応じた第1磁界信号、第2磁界信号と、磁気センサから得られる検査対象物の表面に設けられた所定深さの穴の近傍の磁界強度に応じた第3磁界信号と、第4磁界信号とを用い、前記第1及び第2磁界信号の値の変化と、第3及び第4磁界信号の値の変化と、所定深さと、に基づいて、窪んだ傷の深さを算出する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
チェンジレバーユニット
【課題】位置検出精度のばらつきをより一層抑制して検出結果の安定化を図るとともに、シフトパターンの変更に伴う設計変更をできるだけ抑制する。
【解決手段】ホール素子14b、シフト回動軸4、セレクト回転軸5、チェンジレバー6、およびマグネット14aが1つのユニット本体2に取り付けられて、1つのサブユニットとして構成されている。これにより、チェンジレバー6,マグネット14a、およびホール素子14bがより高精度に位置決めされて設けられている。
(もっと読む)
回転角検出装置
【課題】磁気検出素子の破壊を招くことなくICパッケージを安定して固定可能な回転角検出装置を提供する。
【解決手段】カバー部材4を構成する部位のうち、スロットルボディ14に固定されるフランジ部42と、ICパッケージ2を支持する支持部50とは、樹脂により一体に形成されている。これにより、カバー部材4をスロットルボディ14に取り付けたとき、スロットル弁11の弁軸12に対する支持部50の位置が安定する。ICパッケージ2は、形成後の支持部50に圧入されることにより封止体30の外壁の一部に所定の圧力が作用した状態で、支持部50に支持されている。この構成により、支持部50および弁軸12に対するICパッケージ2の位置が安定する。
(もっと読む)
101 - 120 / 704
[ Back to top ]