
Fターム[2F063GA52]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁電変換素子、磁気抵抗素子、ホール素子 (722)
Fターム[2F063GA52]の下位に属するFターム
Fターム[2F063GA52]に分類される特許
41 - 60 / 704
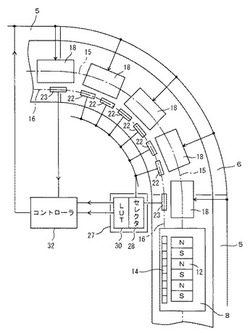
移動体システムと移動体の位置検出方法
【課題】
カーブ区間で移動体の位置を正確に求める。
【構成】
移動体に被検出用の磁石の列が設けられ、移動体の走行方向に沿っての検出範囲の長さが磁石の列の長さよりも短い磁気式変位センサが、移動体が走行する軌道の少なくともカーブ区間に複数個間隔を空けて配置されている。移動体の位置に応じて、複数個の変位センサを順番に切り換えるように選択することにより、移動体の位置を求める統合ユニットが設けられている。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法

【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
磁気抵抗素子を用いた位置検出装置及びこれを用いたレンズユニット
【課題】組立・調整作業が容易で良好な出力特性が得られる小型の位置検出装置およびこれを用いたレンズユニットを提供する。
【解決手段】磁気抵抗素子3を保持するホルダ5は、一端に磁気抵抗素子3の感受面と略平行且つ移動方向と直交する方向に突出した凸部を有し、ベース7は、前記凸部が挿入される凹部と、光軸と平行な方向に配設され、互いに平行な2つの平面部25を有する2つの突出部21と、ベース7を鏡筒に取り付ける位置決め手段とを備え、シムは、突出部21に設けられた平面部25と前記鏡筒との間に挿入され、ベース7を前記位置決め手段によって前記鏡筒に取り付ける際に、ベース7が突出部21を基点として湾曲することにより、磁気記録媒体と磁気抵抗素子3の間隔を調整し、前記シムは、その厚みを変更することで前記ベース7の前記鏡筒に対する距離が調整され、磁気抵抗素子3の前記磁気記録媒体に対する倒れが補正される。
(もっと読む)
モータ及び電動パワーステアリング用モータ
【課題】ロータの回転位置の検出精度を向上して、トルクリップルの低減、出力向上に寄与できるモータを提供する。
【解決手段】モータMの回転軸22にはホルダ31を用いてセンサマグネット32が保持されるのに対し、そのセンサマグネット32と軸方向に対向配置された磁気センサ44が回路基板43上に設けられている。そして、センサマグネット32の各磁極部の外周面には磁気誘導部51,52が当接して設けられ、各磁気誘導部51,52は、磁気センサ44と径方向に対向する位置まで延び、センサマグネット32により生じる磁束を磁気センサ44上に誘導する。
(もっと読む)
アクセルペダル装置
【課題】構造の簡素化等を図りつつ、遮磁板等の対策を施すことなく位置センサに対するアクティブ制御機構の磁場の影響を低減ないし防止する。
【解決手段】ペダルアーム20を回動可能に支持するハウジング10、復帰バネ30、ペダルアームの角度位置を検出する磁気式の位置センサ40、所定条件下でペダルアームを休止位置に向けて押し戻すように制御するアクティブ制御機構50(駆動源51,戻しレバー52,制御回路基板53)を備えたアクセルペダル装置において、制御回路基板53には、位置センサ40(ホール素子44)の回路が設けられている。これによれば、従来のように位置センサのための専用の回路基板を設ける必要が無く、又、リード配線等を廃止してバスバー等により位置センサを連結することで、部品点数を削減して、組立工数の削減、低コスト化、装置の小型化等を達成できる。
(もっと読む)
相対角度検出装置および電動パワーステアリング装置
【課題】ハウジング内の電線の端部に大きな力が及ばないようにすることを簡易な構成で実現する技術を提供する。
【解決手段】内外を連通する連通孔161が形成されたハウジング140内に収納され、2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサ30と、センサ30から出力される電気信号をハウジング140外の電子制御ユニット200に伝送する電線310と、連通孔161に嵌合されて電線310を保持するグロメット320と、連通孔161におけるグロメット320よりも外側の部位に配置されるソケット330と、を備え、ソケット330は、連通孔161の孔方向と交差する方向に分割可能な下側部材340および上側部材331を有し、下側部材340および上側部材331の内部に電線310を通すとともに下側部材340および上側部材331で押圧することでハウジング140外の電線310の向きを孔方向と交差する方向に変更する。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
サイドスタンドの位置検出装置、サイドスタンド装置、二輪車
【課題】磁石の磁力のばらつきに起因して、サイドスタンドの位置の検出結果にばらつきが発生するのを抑制する。
【解決手段】サイドスタンドの位置検出装置は、磁石4と、磁石4と対向するホールIC5と、二輪車の車体に対して固定され、磁石4と磁気センサ5とを収納し、磁石4と磁気センサ5との間に溝2dが形成されたケース2とを備える。サイドスタンドが収納位置にある場合は、サイドスタンドの回転に連動する遮磁板13が溝2d内に位置して、磁石4からホールIC5への磁界Tが遮蔽されることにより、当該収納位置が検出される。サイドスタンドが起立位置にある場合は、遮磁板13が溝2dから退避して、磁石4の磁界TをホールIC5で検知することにより、当該起立位置が検出される。
(もっと読む)
回転角検出装置
【課題】構成部材の組み付けの確認作業を容易に行うことができる回転角検出装置を提供する。
【解決手段】主動ギア、従動ギア50、磁石60と、磁気センサ81と、従動ギア50の回転軸方向への移動を規制するホルダ70と、これらを収容するケース20とを備える回転角検出装置において、従動ギア50は、ケース20に回転可能に軸支され、ホルダ70は、従動ギア50の軸受と反対側の部位に接触した状態で装着され、カバー30のホルダ70に対向する部位には、弾性変形可能とされた規制部材35を設け、カバー30を軸受と反対側からホルダ70に対向してケース20に取り付けたとき、規制部材35は、ホルダ70が存在しない場合には、従動ギア50と係合してこれの回転を規制する一方、ホルダ70が存在するときには、ホルダ70との接触により弾性変形して従動ギア50とは係合しない回転角検出装置。
(もっと読む)
回転角センサ
【課題】検出精度を向上することの可能な回転角センサを提供する。
【解決手段】第1、第2センシングIC20、30は、スロットル弁の回転により変化する磁界に応じた信号を出力する磁気検出素子21、31、この磁気検出素子21、31を覆うモールド体22、32、並びに、一端が磁気検出素子21、31に接続され他端がモールド体22、32から突出して回路基板12に電気的に接続される第1リード23、33及び第2リード24、34を有する。樹脂体60は、磁気検出素子21、31が埋め込まれた位置に対応する正面221、321及び背面222、322を除くモールド体22、32、第1リード23、33、第2リード24、34、及び回路基板12を封止する。これにより、第1、第2センシングIC20、30と回路基板12が設けられたハウジングカバー10とが樹脂体60により固定される。
(もっと読む)
真空用モーター、真空用ロボット
【課題】真空排気装置に接続された空間に不純物ガスを放出しない真空用モーターと真空用ロボットを提供する。
【解決手段】
筒部材11と、回転軸12と、磁石14と、コイル15と、信号を生成する符号が、回転軸12の中心軸線を中心とする円周に沿って表面に配置された回転板21aと、信号を検出できるセンサ22aとを有し、回転板21aが配置された空間は真空排気装置42に接続されて真空排気される真空用モーター10aであって、内部にセンサ22aが配置されたセンサ室24aと、信号を透過する透過窓23aとを有し、透過窓23aはセンサ室24aの開口を塞ぐように設けられ、センサ室24の内部空間は回転板21aが配置された空間から分離され、センサ22aから放出された不純物ガスは真空排気装置42に接続された空間に放出されない。
(もっと読む)
アングルセンサー
【課題】本発明は、回転軸によって回転するメインギアの偏心を補償できる構造を持つことによって、ギアの摩耗及び歯強度の低下を防止することができて、作動信頼性及び耐久性を向上させられるアングルセンサーを提供する。
【解決手段】本発明は、回転軸が貫通し内部に空間を形成するハウジング、前記ハウジングの内部に配置され中心部で前記回転軸と結合して共に回転する結合部材、前記結合部材の外周面に結合して結合部材と共に回転するリング状のメインギア、前記メインギアに歯合されるサブギア、前記メインギアの内周面から内周方向に突出した内突起及び前記結合部材に形成されて前記結合部材の回転力を前記メインギアに伝達するように前記内突起が挿入されるスリットを含むアングルセンサーを提供する。
(もっと読む)
回転角度検出装置、、回転角度検出方法、部品実装装置
【課題】回転軸VAを中心とする回転動作の他に回転軸VA方向への移動も移動部材85が行なう構成において、移動部材85の回転角度θeを磁気センサにより高精度に検出することを可能とする。
【解決手段】磁石91とホールIC921、922との回転軸VA方向への距離hが所定の検出距離となる検出位置Pdに移動部材85がある状態でのホールIC921、922の出力信号Ss、Scに基づいて、アーム61bに対する移動部材85の回転角度θeを検出する。したがって、ホールIC921,922と磁石91との距離の変化による影響を排して、ホールIC921,922の出力信号Ss、Scから、アーム61bに対する移動部材95の回転角度θeを高精度に検出することが可能となる。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
位置検出装置及びそれを用いたアクチュエータ
【課題】基板に対する磁気センサと磁石の配置構成の簡素化を図るとともに、検出精度を落とすことなく、汎用的な基板および磁石を用いた場合においても、基板と磁石とのギャップを小さくして装置の小型化、薄型化、軽量化を図ること。
【解決手段】磁気センサ53は、基板51上に少なくとも1個以上が、磁石52を基板51に投影した領域外に配置され、磁気センサ53の感磁方向が基板51に対して垂直である。磁石52は、基板51に平行な平面内で、任意の一方向に移動可能で、基板51からの最近接部の距離Aが、磁気センサ53の最遠隔部の距離Bよりも基板51の近くに支持されるように磁気センサ53と同じ面側に配置され、移動方向にN極とS極が並んで着磁された磁石である。
(もっと読む)
41 - 60 / 704
[ Back to top ]