
Fターム[2F063GA52]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁電変換素子、磁気抵抗素子、ホール素子 (722)
Fターム[2F063GA52]の下位に属するFターム
Fターム[2F063GA52]に分類される特許
141 - 160 / 704
測定プローブ
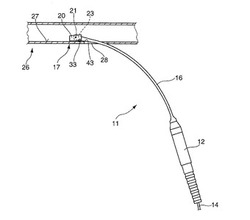
【課題】空洞内の被覆を検査でき、または空洞の被覆の厚さまたは不十分にしかアクセス可能でない区域を非破壊方式で判定できる測定プローブを提供する。
【解決手段】開口部によってアクセス可能な、または曲がった表面上の、特に空洞26内の薄い層の厚さの非破壊測定のための測定プローブ11であって、センサ要素と前記空洞26の検査予定の表面27上でセンサ要素に割り当てられる接触式球状のキャップとを備える測定ヘッド17と、前記測定プローブ11を測定予定の表面27上を表面27に沿って位置決めしガイドするための掴み要素12とを備え、それによってこの掴み要素12に長い弾性的に曲り易いガイド・バー16が設けられ、ガイド・バーは掴み要素12に対向するその端部上に少なくとも1つの測定ヘッド17をその測定ヘッドがガイド・バー16に対して移動できる。
(もっと読む)
位置検出装置及びシフトレバー装置

【課題】検出手段が故障しても、位置検出に際して誤判定を生じ難くすることができる位置検出装置及びシフトレバー装置を提供する。
【解決手段】シフトレバー3に磁石を設け、装置本体2にMR素子1を設けて、MRセンサ1により磁石の磁界を検出することで、シフトレバー3の操作位置を判定する。シフトレバーはモーメンタリ式をとり、中立位置から他の位置に操作されると、その後、元の中立位置に自動で復帰する。また、MR素子1のセンサ出力で位置判定を行うに際して、シフトレバーが行きと帰りの動きをとるとき、MR素子1の出力が2回変化、つまり往復変化する。よって、MR素子1のセンサ出力が往復変化をとることを確認すると、シフトレバー3を操作有りと判定する。
(もっと読む)
物理量センサ及びマイクロフォン
【課題】検出感度の向上を図ることの可能な磁界検出型の物理量センサ及びマイクロフォンを提供する。
【解決手段】被検出磁界を形成する磁界形成部10と、被検出磁界の第1方向成分Hxに応じた電気信号を出力する磁界検出部4と、外部からの振動入力に応じて第1方向xと交差する第2方向yに磁界形成部10と磁界検出部4とを相対振動させる振動薄膜3とを備えたマイクロフォン1において、磁界形成部10を、磁界検出部4の第2方向y一方側に配置され一組の磁極間に第1磁界H1を発生する第1磁界発生部11と、磁界検出部4の第2方向y他方側に配置され一組の磁極間に第2磁界H2を発生する第2磁界発生部13とから構成する。これにより、第1磁界発生部11と第2磁界発生部13との間に互いの第1方向成分が逆向きの第1磁界H1と第2磁界H2との合成磁界である被検出磁界を形成する。
(もっと読む)
位置検出装置及びシフトレバー装置
【課題】故障対応のために重系をとっても、検出手段の個数を少なく抑えることができる位置検出装置及びシフトレバー装置を提供する
【解決手段】2重系の第1位置検知MR素子11a,11bと、同じく2重系の第2位置検知MR素子12a,12bとを設けて、シフトレバーの操作方向を検出する。また、これら素子の中間位置に、1つの移動検知MR素子13を設けて、シフトレバーの移動有無を検出する。これにより、2重系の下、シフトレバーの位置を上中下の3位置で検出する。移動検知MR素子13は単にシフトレバーの移動有無を検出できればよいので、単なる1つのMR素子1で済む。よって、位置検出装置5を2重系3位置検出としても、従来のところMR素子1が6個必要であったのが、合計5個で済み、MR素子1を1つ削減することが可能となる。
(もっと読む)
位置検出装置及びシフトレバー装置
【課題】検出手段が故障しても、位置検出に際して誤判定を生じ難くすることができる位置検出装置及びシフトレバー装置を提供する。
【解決手段】シフトレバーのセレクト方向とシフト方向両側とにそれぞれMR素子を3つ設けて3重系とする。また、MR素子のセンサ出力によりシフトレバーの位置を判定するに際して、MR素子のH/Lの出力レベルが切り換わったときの値のみで判定するのではなく、切り換わり後の現在値と、その値に変化する前値とをセットにして取り込み、この出力変化組合せからシフトレバーの操作位置を判定する。
(もっと読む)
回転角検出装置
【課題】磁石の温度特性を補償し、検出精度を高めることの可能な回転角検出装置を提供する。
【解決手段】被検出物の回転に応じてロータ20はステータ30と相対回転する。ステータ30の内部に形成されたギャップ部33に配置されたホールIC40は、ギャップ部33を通過する磁束密度に応じた信号を出力する。ロータ20と共に回転するサブ磁石51、52は、メイン磁石23、24により発生したギャップ部33を通過する磁束に対して逆方向に流れる磁束を発生する。このサブ磁石51、52がギャップ部33に発生させる磁束密度は、メイン磁石23、24がギャップ部33に発生させる磁束密度より小さい。また、サブ磁石51、52の温度係数は、メイン磁石23、24の温度係数より大きい。このため、サブ磁石51、52とメイン磁石23、24とが温度変化するとき、ギャップ部33を通過する磁束密度の変化が抑制される。
(もっと読む)
位置検出装置、及び位置検出機能付き表示装置
【課題】使用する磁気センサの数を増やすことなく高解像度の位置検出を行う。
【解決手段】互いに離間して配置した複数の磁気センサによって、任意の入力位置における磁気を個別に検出する。隣接する4つで一組の磁気センサによってそれぞれ区画される複数の領域の中で、該領域を区画する一組の磁気センサの検出値の総和が最大である領域を、入力位置が含まれる特定領域として判定する。特定領域を区画する一組の磁気センサのうちで検出値が最大である特定の磁気センサの位置と、特定領域を区画する一組の磁気センサの検出値A(m,n)、A(m−1,n)、A(m+1,n)、A(m,n−1)、A(m,n+1)とに基づいて入力位置を算出する。
(もっと読む)
位置検出システム及びそれを備えた多方向入力装置
【課題】磁界発生部品Yからの外乱による影響を少なくすることができる位置検出システム、及び搭載製品の設計の自由度を向上させ、また、搭載製品の小型化を図ることができる多方向入力装置を提供すること。
【解決手段】位置検出システム1は、基板11上に実装された第1〜第3の磁気検出素子12A〜12Cと、基板11に配設され、基板11に対して移動可能な磁石13と、第1の磁気検出素子12A及び第2の磁気検出素子12Bの出力差で第1方向の出力を求め、第2の磁気検出素子12B及び第3の磁気検出素子12Cの出力差で第2方向の出力を求める制御手段と、を具備し、第1の磁気検出素子12A及び第3の磁気検出素子12Cは、磁石13を中心に対称な位置に配置され、第2の磁気検出素子12Bは、第1の磁気検出素子12A、第2の磁気検出素子12B及び第3の磁気検出素子12Cを結ぶ仮想円弧における中点位置に配置される。
(もっと読む)
位置センサ及び位置検出方法
【課題】ホール素子用磁石と外部磁力源が併存している場合に、外部磁力源の磁力の影響を除去して位置検出の誤差を少なくする。
【解決手段】VCMに適用される位置センサは、コイル部14に取り付けられたホール素子用磁石9と、磁気回路部11のホール素子用磁石9に対面する位置に取り付けられたホール素子1〜nと、磁気回路部11のホール素子1〜nに対してコイル部14の中心軸Lから等距離になる対称位置に取り付けられたホール素子1’〜n’とを有する。ホール素子用磁石9の位置P’は、ホール素子1〜nの出力電圧V1〜Vn、ホール素子1’〜n’の出力電圧をV’1〜V’nとすると、P’=F(V1−V’1,V2−V’2,・・・,Vn−V’n)より求まる。
(もっと読む)
ワイヤーロープの径測定装置
【課題】移動するワイヤーロープに対して径の測定ができ、ワイヤーロープへの取り付けが容易なワイヤーロープの径測定装置を提供する。
【解決手段】ワイヤーロープ11が隙間を有して挿通される貫通孔12が形成された枠体部材13と、貫通孔12の周囲に3個以上のセンサ部14〜17が間隔をあけて設けられ、センサ部14〜17部で貫通孔12を挿通するワイヤーロープ11までのそれぞれの距離を検知する距離検出手段18と、距離検出手段18からの信号を基に、ワイヤーロープ11の直径を演算する制御部19とを有し、枠体部材13は、貫通孔12を中心に少なくとも2つに分割可能である。
(もっと読む)
位置検出機構
【課題】本発明は、位置検出機構の検出可能な範囲を拡大するということを目的とするものである。
【解決手段】本発明の位置検出機構は、Y軸に垂直な方向の断面における磁化方向が断面位置に寄らず一定であり、X軸方向の対向する端面における磁力線の方向が互いに反対方向である磁石15と、磁石15とZ軸方向で間隔を空けて配置され、XY平面に平行な方向の磁界を感知することができるGMR素子13とを備え、磁石15は、GMR素子13に対して相対的にX軸方向およびY軸方向に移動可能であり、磁石15のX軸方向、Y軸方向およびZ軸方向の外形はY軸方向がもっとも長く、GMR素子13は、磁石15がY軸方向にΔY移動した際の磁石15からの磁束密度の変化ΔBが±5%以内となる位置に位置し、GMR素子13は、磁石15をZ軸方向に投影した領域の外部に位置している。
(もっと読む)
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
磁気センサユニット
【課題】回路規模の増加を伴うことなく中心位置の検出精度の向上を図り、結果的に位置検出精度を向上させる。
【解決手段】センサ出力Vhr、Vhlの差信号を演算する減算部16及びセンサ出力Vhr、Vhlの和信号を演算する加算部17の上流に設けた、センサ出力Vhr、VhlをV/I変換するV/I変換部13a、13bを所定周期で切り替え、結果的にセンサ出力VhrをV/I変換部13a、センサ出力VhrをV/I変換部13bで処理したときの差信号及び和信号の除算値と、センサ出力VhrをV/I変換部13b、センサ出力VhrをV/I変換部13aで処理したときの差信号及び和信号の除算値との平均値を、位置検出信号として出力する構成とする。これによりV/I変換部13a、13bでのオフセット成分を低減し位置検出信号に含まれるオフセット成分を低減して精度向上を図る。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、複数回転する回転体の回転角度が検出可能で安価な回転角度検出装置を提供することを目的とする。
【解決手段】検出体22の内周に雌ネジ部22Cを設けると共に基体30に雄ネジ部32Aを設けて、この雄ネジ部32Aに雌ネジ部22Cを螺合させ、回転体21の回転に連動して検出体22を回転させると共に回転軸方向の上下方向へ移動させ、磁石23Aと磁気検出素子23Bからなる検出手段からの検出体22の回転及び回転軸方向への移動に伴う検出信号S1、S2によって、制御手段29が回転体21の回転角度を検出するように回転角度検出装置を構成する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
空調空気吹出しノズル制御装置
【課題】角度検出器に角度検出専用センサを使用せず磁気センサを使用することで角度検出に関するコストを抑え、装置全体を安価に抑えた空調空気吹出しノズル制御装置を提供する。
【解決手段】回転体1に設けた磁石6と、回転体1と中心軸を同一とする非回転体に磁気センサ(ホール効果スイッチ9〜12)を設置して角度検出専用センサの代替とすることで装置の低コスト化を実現できる。また磁気センサはチップ状の形状であり、回転体1の回転軸の太さや構造に左右されないので角度検出専用センサを使用する時のような装置全体の大型化、高コスト化を防ぐことができる。
(もっと読む)
変速位置検出装置
【課題】 電源を供給する制御装置が故障した場合であっても、変速装置のニュートラルを表示することができる変速位置検出装置を提供する。
【解決手段】 車両の変速装置の変速位置を操作するシャフトに連動して回動する回転部材1と、回転部材1とともに回動する磁石2と、磁石2が回転することによって磁石2の磁界の強さを検出する磁気検出部3と、この磁気検出部3からの検出信号を受ける制御装置8と、を備えた変速位置検出装置Aにおいて、磁気検出部3は、前記変速装置の変速位置を前記シャフトの位置から検出する第1の磁気検出部31Aと前記変速装置のニュートラルを前記シャフトの位置から検出する第2の磁気検出部31Bとを備え、第2の磁気検出部31Bは、制御装置8以外の他の装置から駆動電源が供給されるものである。
(もっと読む)
故障診断装置、回転角度検出装置および故障診断方法
【課題】故障検出を、故障検出専用の回路などを別に設けることなく行うことができる技術を提供する。
【解決手段】第2の歯車の回転角度を検出する第1の回転角度センサと、第3の歯車の回転角度を検出する第2の回転角度センサと、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度との角度差に基づいて第2の回転軸の回転角度を演算する演算手段とを備える回転角度を検出する検出装置の故障を診断する故障診断装置であって、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度とに基づいて、第2の歯車の回転角度と第3の歯車の回転角度との角度差が零となる交差角θKを算出し(S906)、交差角θKに基づいて故障を診断する(S907〜S910)。
(もっと読む)
位置検出装置
【課題】識別数を増やした場合にも大型化を抑え、かつ誤検出を確実に防止すること。
【解決手段】顕微鏡本体20に配設した検出部31と、レボルバ10に配設した複数の被検出部40a,40bとを備え、検出部31が検出した被検出部40a,40bの検出結果に基づいて顕微鏡本体20に対するレボルバ10の回転位置を判別する装置であって、検出部31は、被検出部40a,40bに対する相対的な移動軌跡が共通の円弧となる位置に、相互に検出条件が異なる位置規定用検出部31A及び判別用検出部31Bを配設して構成したものであり、複数の被検出部40a,40bは、それぞれ位置規定用検出部31Aが検出対象とする位置規定用被検出部と、判別用検出部31Bが検出対象とする判別用被検出部とを有し、位置規定用検出部31Aが位置規定用被検出部を検出した際に判別用検出部31Bによって検出可能となる位置に判別用被検出部を配設した。
(もっと読む)
141 - 160 / 704
[ Back to top ]