
Fターム[2F063GA52]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁電変換素子、磁気抵抗素子、ホール素子 (722)
Fターム[2F063GA52]の下位に属するFターム
Fターム[2F063GA52]に分類される特許
81 - 100 / 704
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
変速位置検出器

【課題】ニュートラル位置を検出し、外部機器の表示手段を動作させる変速位置検出器を提供する。
【解決手段】鞍型車両の変速位置を定める被検出体であるシフトカム3に連動して回動する磁石5と、磁石5に対向して配置され磁石5が回転することによって磁石5の磁界の強さを検出する磁気検出部6と、を備えた変速位置検出器1において、磁気検出部6は、変速位置を検出する第1の磁気検出素子6aと、変速のニュートラル位置を検出する第2の磁気検出素子6bと、を備え、第1の磁気検出素子6aは、シフトカムの回転角度に応じた信号S1を出力し、第2の磁気検出素子6bは、ニュートラル位置であるか否かを示すスイッチ信号S2を出力し、第2の磁気検出素子6bは、スイッチ信号S2に基づいて外部機器8の表示手段9を制御するものである。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
位置検出装置
【課題】被検出体の板厚が徐々に変化する変化部を容易に加工や製品検査を実施することが可能な位置検出装置を提供する。
【解決手段】ハンドルバー1に設けられたハンドルグリップ3の回動動作に基づいて回動するマグネット4aと、マグネット4aの回転を検出する磁気検出手段5とを備えた位置検出装置1において、マグネット4aは、その外面4bと内面4cに曲面を備えた板状部を備え、外面4bと内面4cの形状の少なくとも一部はマグネット4aの回転軸方向に対して垂直方向の断面形状が円弧形状であり、外面4bの円弧形状の中心を第1の中心4dとし、内面4cの円弧形状の中心を第2の中心4eとし、第1の中心4dと第2の中心4eとを異なる位置とし、マグネット4aの板状部に肉厚部4fと肉薄部4gとを設けたものである。
(もっと読む)
アングルセンサー
【課題】本発明は、アングルセンサーを構成するメインギヤとサブギヤとの間の最適なギヤ比を選択することにより、操向軸のアングル測定の正確性を向上させることができるアングルセンサーに関する。
【解決手段】車両操向軸の回転量を測定するアングルセンサーであって、前記操向軸と共に回転するリング状のメインギヤと、前記メインギヤの回転によって回転し、一面にマグネットが結合される第1サブギヤと、前記マグネットの磁界変化を感知して回転量データを出力する磁気素子とを備え、前記第1サブギヤは、前記メインギヤが1回転する間に4回転するアングルセンサーを提供する。したがって、メインギヤのアングルを測定するための有効データを取得する過程でスケールファクターの値が最小化されるため、測定値の誤差が最小化されるという利点がある。
(もっと読む)
バルブ制御装置
【課題】 アクチュエータのロッド4の軸振れ幅、つまり磁性移動体7の振れ幅の違いによるストロークセンサの出力値の差を低減して、ロッド4のストローク量の検出精度を向上することを課題とする。
【解決手段】 ウェイストゲートバルブ制御装置においては、ホール素子の感磁面を、磁性移動体7の中心を通り、且つ第1直線AOA’に平行な第1仮想直線LAと、磁性移動体7の中心を通り、且つ第2直線BOB’に平行な第2仮想直線LBとの交差角度の範囲内において、第1直線AOA’に平行な第1仮想直線LAと第2直線BOB’に平行な第2仮想直線LBとの交差角度の中心線(∠AOBの角度中心線LX)上に配置したことにより、ホール素子の感磁面に対する磁束密度(磁界の強さ)の変化を小さくすることができる。これにより、ロッド4の軸振れを要因とするストロークセンサの出力値の差を低減できる。
(もっと読む)
操向角感知ユニット付きEPSモータ
【課題】筐体の内部に操向角を感知し得る感知ユニットが配設できるように構造が改善されたEPSモータを実現する。
【解決手段】操向角感知ユニット付きEPSモータは、筐体1と、ブラケット2と、回転軸3と、ステータ4およびロータ5を備える電動式操向装置のEPSモータにおいて、筐体1は、内部空間部にステータ4およびロータ5が設けられ、上側に2ブラケットが取り着けられ、下側に回転軸3が突き出るように取り着けられる上筐体1aと、上筐体1aの下側に配置されて内部に操向角感知ユニット100が設けられる下筐体1bと、を備える。
(もっと読む)
検出装置の製造方法及び検出装置付き部品並びにスロットル制御装置
【課題】金型のキャビティに対する充填樹脂量のばらつきを防止する。
【解決手段】磁気検出部材をインサートして発泡樹脂でモールドすることにより回転角検出装置を成形する金型60に、キャビティ63に連通されかつキャビティ63を流動する溶融した発泡樹脂52の先端部を受入れ可能な捨てキャビティ80が設けられる。金型60を用いて、キャビティ63に溶融した発泡樹脂52を射出、充填し、その発泡樹脂52を発泡させてキャビティ63に充満させるとともに、余剰分の発泡樹脂84を捨てキャビティ80にオーバーフローさせる。
(もっと読む)
地中障害物磁気探査方法
【課題】シールド掘進機による掘削前に、該シールド掘進機の進路における地中障害物の有無を、構造簡単且つ低コストで探査する。
【解決手段】検知可能半径rの磁気センサーを用い、シールド掘進機のシールド筒体内から、該シールド掘進機の進行方向の地盤に長尺な棒を挿入可能な探査孔を2以上の複数箇所に形成し、且つ、前記複数の探査孔を、それぞれ少なくとも1つの他の探査孔との距離Rが、r<R<2rを満たすように形成し、1つの前記探査孔に、先端に前記磁気センサーを取り付けた長尺な探査棒を挿入して行う先の磁気探査工程と、前記先の磁気探査工程の後に、前記探査棒を、先の磁気探査工程を行った探査孔から距離Rの位置の地盤に形成された他の探査孔に挿入して行う後の磁気探査工程とを行い、前記先の磁気探査工程と後の磁気探査工程の結果から、前記地中障害物の位置を判断する位置検知工程を有する地中障害物磁気探査方法。
(もっと読む)
回転角検出装置
【課題】複数のセンサの出力信号うちの1つの出力信号に異常が発生した場合に、異常が発生した出力信号を特定できるとともに、正常な他の出力信号に基づいて正確な回転角を演算することが可能となる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、第1の回転角演算部21、第2の回転角演算部22、第3の回転角演算部23、異常監視部24および最終回転角演算部25を含む。異常監視部24は、第1、第2および第3の出力信号V1,V2,V3に基づいて、各出力信号V1,V2,V3が正常であるか異常であるかを判定する。最終回転角演算部25は、異常監視部24の最終判定結果と、第1、第2および第3の回転角演算部21,22,23によってそれぞれ演算された第1、第2および第3の回転角θ1,θ2,θ3に基づいて、最終的な回転角θを演算する。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
車両の変速操作装置
【課題】複数の変速レンジのうちのいずれか1つを選択できるようにすると共に、特定の変速レンジにおいては、運転者の連続的な操作意志を追加的に表現できるようにし、運転者の連続的な操作意志に伴う制御が行えるようにした車両の変速操作装置を提供する。
【解決手段】メインシャフトと、メインシャフトに沿った摺動と回動とが可能なように設けられた変速レバーと、変速レバーが単一経路上を往復移動できるように、変速レバーの移動経路を規定すると共に、複数の変速レンジが前記移動経路上に並んで配置されたゲートパターンを備えたゲートプレートと、を含んで構成され、
ゲートパターンは、特定の1変速レンジを除いた残りの変速レンジと、特定の1つの変速レンジと、が互いに区分できるように形成され、特定の1つの変速レンジは、変速レバーがゲートプレートに対し連続的に変位するように設定されていることを特徴とする。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】ギヤのバックラッシュを低減できるとともに、回転角度の検出精度が低下しない回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】バネ12は付勢手段として、その一端がケース9に弾接して、ケース9がセンサハウジング10の方向に付勢される。このケース9を介したバネ12の付勢力によって、ケース9に装着された第一の検出ギヤ3及び第二の検出ギヤ4をメインギヤ2の方向へ押圧している。さらに、ケース9を取付けるセンサハウジング10には、バネ12を挟み込んだ形で突出した押さえ板13が設けられ、この押さえ板13にバネ12の他端が弾接してバネ12を保持する。バネ12は両端をケース9及び押さえ板13に設けられた座グリ穴14,15により保持され、バネ12の付勢力が一定の力になるように保持されている。
(もっと読む)
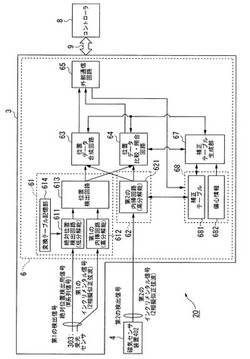
位置検出装置
【課題】電源電圧が低下した場合の挙動仕様を共通にすることの可能な位置検出装置を提供する。
【解決手段】ホール素子の電圧信号を処理する信号処理回路から出力された電圧信号がバッファアンプ65によって緩衝増幅され、出力端子41を通じてECUに伝送される。電流検出回路67は出力端子41を流れる電流の向きを検出する。電源電圧検出回路68はホールICに供給される電源電圧の低下を検出する。電源電圧が低下したことを示す信号が電源電圧検出回路68から出力されると、電圧切替回路69は、出力端子41からECUに出力される電圧信号を電流検出回路67の検出した電流の向きに応じて高電圧側又は低電圧側にする。これにより、ECUの受け回路に設けられたプルアップ抵抗又はプルダウン抵抗に対応する電圧信号がECUに出力される。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】磁石16の回転中心に対して所定角度間隔で、複数の磁気検出素子18Aと18Bを対向配置すると共に、磁気検出素子18Aと18Bからの検出信号L1とL2を加算または減算して回転角度を検出する第一の制御回路19と、検出信号L1とL2を除算した後、逆関数に変換して回転体12の回転角度を検出する第二の制御回路21と、印加された電圧に応じて、第一の制御回路19と第二の制御回路21のいずれを動作させるか切換えるスイッチング回路24を備えることによって、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置27を得ることができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】温度変化があった場合でも、ギヤのバックラッシュの変化量を低減できる回転角度の検出精度のよい回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】ケース8は、センサハウジング9との取付け部分、及び検出ギヤ4の回転を支持する部分に線膨張係数の小さい金属により形成されたインサート部材11がインサート成形されている。また、回転体10及びメインギヤ2内に装着されメインギヤ2を保持する保持リング3が同じく線膨張係数が小さい金属材料で形成されている。この保持リング3を介してメインギヤ2は回転体10に圧入され、回転体10にメインギヤ2がガタのない状態で組付けられる。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
回転角度検出装置およびステアリング装置
【課題】回転角度検出装置において、回転部品の回転角度を検出するために互いに連動する主回転部品および副回転部品から構成される回転部品群の設計の自由度を大きくする。
【解決手段】回転角度検出装置4は、回転中心線Lを中心にステアリング装置1の出力軸21と一体に回転する主回転部品41と、所定回転比で主回転部品41と連動して回転する第1,第2副回転部品51,61と、第1,第2副回転部品51,61の第1,第2回転角度θ1,θ2に応じた第1,第2検出信号S1,S2を出力する第1,第2磁気抵抗素子71,72と、第1,第2検出信号S1,S2に基づいて操舵角θを検出する回転角度検出手段49とを備える。主回転部品41と第1,第2副回転部品51,61との間での回転の伝達は、主回転部品41および第1,第2副回転部品51,61の接触面42,52;42,62同士の摩擦により行われる。
(もっと読む)
81 - 100 / 704
[ Back to top ]