
Fターム[2F063HA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 静電容量変化型検出器 (661) | 極板に平行な方向の変位を検出するもの (42)
Fターム[2F063HA05]の下位に属するFターム
Fターム[2F063HA05]に分類される特許
1 - 20 / 38
位置測定装置
【課題】操作の容易な高感度の位置測定装置を提供する。
【解決手段】第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体が検出されたことを表す信号を形成するよう構成されている比較器と、第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体を表す信号を出力する出力装置とが設けられている。
(もっと読む)
位置検出装置

【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
位置センサ、計測システム及び平面ステージ
【課題】本発明は、静電容量を利用して簡易な構成で計測対象の変位を計測する。
【解決手段】本発明は、移動ステージの位置を計測する位置センサ100を提供する。位置センサ100は、第1の固定対向電極対111,121の間に部分的に挿入されている第1の可動電極131と、第2の固定対向電極対112,122の間に部分的に挿入されている第2の可動電極132と、第3の固定対向電極対113,123に部分的に挿入されている第3の可動電極133とを備える。第1の対向電極は、第2の対向電極に対して第1の方向にシフトした位置に配置され、第3の対向電極は、第1の対向電極に対して第2の方向にシフトした位置に配置されている。
(もっと読む)
位置センサ、計測システム及び平面ステージ
【課題】本発明は、静電容量を利用して簡易な構成で計測対象の変位を計測する。
【解決手段】本発明は、固定部に対して平面内を相対的に移動する移動ステージを有する平面ステージを提供する。本平面ステージは、移動ステージの位置を計測する位置センサであって、所定の間隔で相互に対向している第1の固定対向電極対と第2の固定対向電極対とを有する固定電極部と、第1の固定対向電極対の間に部分的に挿入されている第1の可動電極と、第2の固定対向電極対の間に部分的に挿入されている第2の可動電極50とを有する可動電極部とを有する第1のセンサを備える。第1の固定対向電極対は第1の可動電極50の挿入状態に応じて変化する第1の静電容量を有し、第2の固定対向電極対は第2の可動電極50の挿入状態に応じて変化する第2の静電容量を有する。
(もっと読む)
位置検出装置、駆動機構、および内視鏡装置
【課題】位置検出の精度の高い位置検出装置、駆動機構、及び内視鏡装置を提供すること。
【解決手段】駆動部材15に対して直線移動する被駆動部材17の位置を検出する位置検出装置30であって、駆動部材15に対して位置決めして設けられた固定子31と、被駆動部材17に設けられた移動子34と、被駆動部材17と移動子34とを連結し、被駆動部材17の直線移動方向における被駆動部材17に対する移動子34の進退移動を規制する弾性体20と、を備え、弾性体20は、移動子34が固定されているとともに移動子34を固定子31へ向けて付勢する軸部23を有し、軸部23は、移動子34を固定子31に接触させ、且つ、駆動部材15に対して被駆動部材17が直線移動されたときに、固定子31に対する移動子34の位置を、固定子31の外面形状に沿って追従させる。
(もっと読む)
歪測定装置
【課題】筒状の第1の電極と、この第1の電極の内側へ進退可能とされた棒状の第2の電極とを備えた歪計において、第2の電極を強固に支持できるようにする。
【解決手段】歪計10は、筒状に形成された第1の電極12aと、第1の電極12aの内側へ進退可能とされ、第1の電極12aとともにコンデンサを構成する棒状の第2の電極12bと、第1の電極12aを支持する第1のケーシング14aと、第2の電極12bを支持する第2のケーシング14bと、を備え、第2のケーシング14bの脚部16bは、第2の電極12bの軸方向に、ケーシング本体15bの中間部から第1の電極12aと反対側の端部近傍まで延出している。
(もっと読む)
ACサーボモータ制御システム用角度センサ
【課題】 交流サーボモータを採用して制御するシステムではなく、しかも簡単でコンパクトなリンク機構と2個の交流サーボモータを同期運転するように制御するシステムに利用できる角度センサが求められている。
【解決手段】 同心円電極を対向させ、その間を半円形のシールド用金属板の回転角度を検出するサンドイッチ構造の容量センサを製作し、一方の電極を2分割し、逆位相の信号を加えることで、一つの容量−電圧変換回路で差動構造とした容量変化形角度センサとするACサーボモータ制御システム用角度センサ。
(もっと読む)
位置センサ、位置制御システム、及び内視鏡装置
【課題】変形し難く、取り扱いが容易な微小静電容量型位置センサ、該位置センサを使用したアクチュエータ制御システム、及び内視鏡を提供する。
【解決手段】本発明の静電容量型位置センサは、筒状の第1電極と、該第1電極と同軸に固定された筒状又は柱状の第2電極とを備えている。第2電極の少なくとも一部は第1電極と接触せずに第1電極の筒内に挿抜可能である。また、測定点の位置に応じた長さだけ第2電極が第1電極の筒内に差し込まれて、測定点の位置に応じた静電容量を有するコンデンサを形成する。
(もっと読む)
回転角センサ
本発明は、回転角センサに関する。この回転角センサは複数のコンデンサプレートを有する少なくとも1つのコンデンサ(14、16)と、ディスク(6)として形成されている誘電体とを有しており、このディスク(6)は、複数のコンデンサプレートの間に配置されており、かつ、回転角度に応じて異なる大きさの面積割合をコンデンサプレートの間で占め、この回転角センサは、少なくとも1つのコンデンサ(14、16)のキャパシタンスの測定値に依存して回転角を特定するように構成されている。 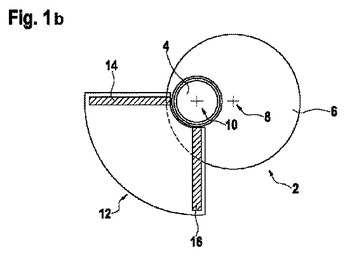 (もっと読む)
(もっと読む)
変位センサおよび力検出装置
【課題】力・モーメントを独立検出する装置の薄型化を図る。
【解決手段】変位基板10側に電極E11,E12、固定基板20側に電極E21,E22を設け、両基板をバネ31〜34で接続する。E11,E21は、γ軸を中心とした円形電極で、αβ平面上へ投影すると、E21はE11内に包含される。E12,E22は、α軸方向にオフセット配置された矩形電極で、E12のβ軸方向幅は、E22のβ軸方向幅内に包含される。E11,E21間の容量値C1は、変位Dγの情報のみを示し、E12,E22間の容量値C2は、変位DαおよびDγの合成情報を示すので、両者を用いて、変位Dα,Dγを独立検出できる。より広い基板の複数N箇所にローカル原点Qを設定し、それぞれ所定の向きにαβγローカル座標系を定め、それぞれに同様の電極を配置する。各原点Qについての検出値Dα,Dγを統合して、基板全体に作用した力・モーメントを検出する。
(もっと読む)
回転入力装置および携帯機器
【課題】ユーザの回転操作に基づいて入力が行われているという感覚をユーザに明確に与えるとともに、ユーザの回転操作を正確に認識することが可能な回転入力装置を提供する。
【解決手段】この回転入力装置4は、ユーザによる操作によりキャップ部41が回転された際に、静電容量式エンコーダ43による検知結果に基づいてキャップ部41に回転方向の力に抗する抵抗力を付与することによりユーザに触感を付与する励磁コイル44を備え、静電容量式エンコーダ43は、キャップ部41に対して常時隙間L2を隔てて対向するように配置され、キャップ部41の回転に伴って回転する回転プレート431およびロータ部432と、ロータ部432に対向するように配置されたステータ部433とを含み、ロータ部432とステータ部433との静電容量の変化に基づいて、キャップ部41の回転角度を検知するように構成されている。
(もっと読む)
静電型エンコーダおよび内視鏡
【課題】小型光学機器で狭いスペースに組み込まれた複数のレンズを位置または変位を正確に計測できる実用性の高い静電型エンコーダ、これを備えた内視鏡を提供する。
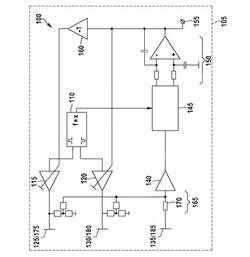
【解決手段】静電型エンコーダは、位置計測方向に配置された電位検出電極13を有する固定子11と、各々が、交流信号TXが供給される電位発生電極17A,17Bを有し、固定子との相対的位置が変化するように設けられた2つの移動子12A,12Bと、2つの移動子のいずれか1つに選択的に交流信号を供給する交流信号供給手段21,25と、固定子の電位検出電極から出力された信号に基づいて2つの移動子のいずれか1つの変位信号を生成する信号処理装置20とを備える。静電型エンコーダは時分割で2つの移動子の変位を独立して計測する。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置
【課題】移動体が複数ある場合において、正しくキャリブレーションを行うことのできる慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置を提供する。
【解決手段】移動手段により往復移動される振動基板に対して、慣性により、複数の移動体のうちの対象となる対象移動体が、一方及び他方の移動限界位置間を移動するように駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、対象移動体に設けられた移動体電極と、振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出し、これら一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離との比率を算出する。さらに、一方及び他方の移動限界位置の少なくとも一方は、対象移動体が対象以外の移動体に突き当たる位置である。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
位置検出装置
【課題】透過性や薄さを損なうことなく表示機能を搭載した位置検出装置を提供する。
【解決手段】透明導電膜からなる第一の電極102と、第二の電極310と、第一及び第二の電極102,310間に介在して設けられた表示材料311と、第一及び第二の電極102,310間に駆動電源の供給を停止した後も表示状態を保持可能な表示部505と、表示すべき信号に基づき表示部505の表示駆動を行う表示駆動部502と、指示体103による第一の電極102上の指示位置を検出して検出信号を出力する位置検出部503と、を具備することを特徴とする。
(もっと読む)
スライド操作装置
【課題】静電誘導型エンコーダを用いたスライド操作装置を提供することを目的とする。
【解決手段】スライド操作装置1は、一点鎖線で示されるケース体11に覆われており、パネル2の裏面に取り付けられる。移動体15は、ガイドシャフト13,14により案内支持されてスライド移動する。固定子基板12には、長手方向に延在する固定子電極(励振電極と電位検出電極)20が形成され、移動子基板19には、固定子電極20に静電結合される移動子電極(浮遊電極)21が形成されている。移動子電極21は、固定子電極20と静電誘導で結合する電極であるので、ケース体11からの配線を必要としない。
(もっと読む)
緩衝器
【課題】 緩衝器のピストン速度が0.05m/sec以下の極微低速領域にあるときの発生減衰力を大きくするについて、装置全体の大型化などを招来させずして車両への搭載性を低下させない。
【解決手段】 シリンダ体1と、このシリンダ体1に出没可能に連繋するロッド体2とを有してなる緩衝器において、シリンダ体1側とロッド体2側との間に配設されてシリンダ体1に対してロッド体2が出没する伸縮作動時にシリンダ体1に対するロッド体2の出没位置を検出する検出手段Sを有すると共に、この検出手段Sが外力作用に応じて静電容量の変化させてなる。
(もっと読む)
機械的ガイドを有する面積変化型静電容量式センサ
【課題】面積変化型静電容量式センサのおいて初期の整列誤差を補正し、駆動時の整列誤差を減少させるようにする。
【解決手段】固定物体上に伝導性パターン14が形成される固定要素10と、移動物体上に伝導性パターン24が前記固定要素10の伝導性パターン14と対向するように配置されて前記固定要素10に対して相対的に平行移動されて重なる面積を変化させる移動要素20と、前記固定要素10と移動要素20とが常に密着した状態を維持バネ要素30と、前記固定要素10と移動要素間20の静電容量の変化によって出力信号を発生させるための電源と、信号検出回路とを備えた面積変化型静電容量式センサにおいて、前記固定要素10及び前記移動要素20の初期整列誤差の補正及び駆動時の整列誤差を減少させるガイド手段とを含む。
(もっと読む)
慣性駆動アクチュエータ
【課題】移動体の全移動範囲に渡って、正確な位置検出を行うことのできる慣性駆動アクチュエータを提供する。
【解決手段】固定部材と、固定部材に接続され、第1及び第2の方向とに微小変位を発生する変位発生手段と、変位発生手段が発生した微小変位によって往復運動する振動基板と、振動基板上に配置され、慣性に基づく移動が可能な移動体と、移動体に接続され、電流印加によって、移動体に電磁気力を作用させることによって、移動体と振動基板との間の摩擦力を制御する駆動手段と、振動基板の平面上に、移動体と絶縁体層を介して対向配置され、かつ、移動体の移動に伴い移動体との対向面積が連続的に増加もしくは連続的に減少するように形成された、位置検出機能を備える検出電極と、移動体と検出電極との間の静電容量を検出することによって、移動体の位置を検出する位置検出手段と、を具備する。
(もっと読む)
1 - 20 / 38
[ Back to top ]