
Fターム[2F063KA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器から得られる信号の形式 (479) | 離散的 (71)
Fターム[2F063KA02]に分類される特許
1 - 20 / 71
回転角検出装置、及びトルクセンサ
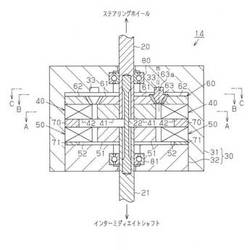
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
主幹制御器

【課題】主幹制御器の操作部及び制御部間の接続距離を延長できるようにして、制御部を運転室以外の場所へ収納し運転室収納機器のスペースを確保するとともに、角度検出器の出力信号数を削減することで、車両艤装線数を削減することができる主幹制御器を提供する。
【解決手段】主幹制御器1は、ノッチ指令を操作するハンドル11の角度を検出するために角度検出器15を用いた操作部10とその制御部20とが分離された、鉄道車両用の主幹制御器である。この主幹制御器において、操作部の角度検出器出力を差動出力のシリアル信号とした。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
操作入力装置及び操作入力検出装置
【課題】操作部に作用する操作入力を検出する機能と操作部に振動を与える機能を単純な構成で実現できる、操作入力装置の提供。
【解決手段】コイル11と、操作入力の作用によりコイル11の軸方向に変位する操作部12と、操作部12の変位により、コイル11との位置関係が変化するコア13と、コイル11の外側に配置されたヨーク14と、コア13とヨーク14に流れる磁束を発生させるマグネット15とを有し、コイル11は、操作部12の変位量に応じた信号を出力し、操作部12は、コイル11に流れる電流とマグネット15の磁束によって可動する、ことを特徴とする、操作入力装置。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
多層構造において層を評価するための装置および方法
【課題】多層構造において層間ギャップを含む層を評価するための装置を提供する。
【解決手段】軸を横切って略整列した複数の縁部を呈する多層構造において、層間ギャップを含む層を評価するための装置10は、少なくとも1つのパラメータを検知するように構成された検知ユニット12、検知ユニットと結合されて、検知ユニットを軸に略沿って移動させるように構成された位置決めユニット14、ならびに位置決めユニット14および検知ユニット12の少なくとも1つと結合された制御ユニット16を含む。制御ユニット16は、検知ユニット12に電気信号を供給する。制御ユニットは16、検知ユニットが複数の縁部を過ぎて移動するとき、少なくとも1つのパラメータの変化を監視する。制御ユニット16は、少なくとも1つのパラメータの変化を使用して評価を行う。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸が高速回転する状態での検出分解能及び測定精度の確保と、同じく低速回転する状態での応答性の確保との両立を図る。
【解決手段】演算器は、円周方向に隣り合う1対の凹溝10a、10bに基づいて発生する1対のパルス間の周期である部分周期δと、互いに異なる1対の被検出用特性変化組み合わせ部3a、3aに対応する1対のパルス間の周期である全周期Lとの比であるパルス周期比δ/Lに基づいて、前記主軸の軸方向変位量を求める。この主軸の回転速度が所定値よりも低い場合に、(A)に示す様に、前記全周期Lとして、円周方向に隣り合う1対の被検出用特性変化組み合わせ部3a、3aに関する値Laを採用する。これに対して、前記回転速度が前記所定値以上である場合に、(B)に示す様に、前記全周期Lとして、中間を飛ばして存在する1対の被検出用特性変化組み合わせ部3a、3aに関する値Lbを採用する。
(もっと読む)
回転検出装置
【課題】回転角度を算出することなく、回転軸が予め定めた角度に位置することを検出することができる回転検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シャフト3の回転に伴って磁界の向きが変わるように配置された磁石21と、磁石21の磁界に応じて信号を出力し、シャフト3が予め定めた回転角度にあるときに出力する信号が切り替わるように配置されるMRセンサと、複数のMRセンサ200a〜200dの出力する信号が切り替わる回転角度がそれぞれ異なるようにMRセンサ200a〜200dを配置し、複数のMRセンサ200a〜200dの出力する信号の組み合わせに応じてシャフト3の角度範囲を検出するシフトポジション検出手段801とを有する。
(もっと読む)
エンジン制御装置
【課題】エンジン出力軸の回転位相のソフトウェアによる検出とハードウェアによる検出との切り替えを適切に行うことができるエンジン制御装置を提供する。
【解決手段】この装置は、欠歯部位を有する10°CA間隔のパルス信号(NE10信号)を入力してTDC信号を出力する信号処理回路を備える。NE10信号に基づくエンジン出力軸の回転位相の検出を、エンジン回転速度NEが高い運転領域では信号処理回路(ハードウェア)による検出を通じて行う一方、エンジン回転速度NEが低い運転領域ではマイクロコンピュータによる演算処理(ソフトウェア)による検出を通じて行う。ハードウェアによる検出からソフトウェアによる検出への切り替えを、エンジン回転速度NEが予め定められた所定速度Vを下回った後に(S202:YES)、エンジン出力軸の回転位相が予め定められた所定位相になるタイミング(S203:YES)で行う。
(もっと読む)
位置検出装置
【課題】位置検出性能の低下を防ぎ、安定した位置検出性能を得られる、複数の位置検出方式を備える位置検出装置を提供する。
【解決手段】第1の位置検出方式における送信導体の選択位置情報を第2の位置検出方式における信号受信のための導体選択に利用することで、第1の位置検出方式における送信導体と第2の位置検出方式における受信導体との間の空間的距離を可能な限り離間させる。更には、第1の位置検出方式における送信導体に供給される送信信号と第2の位置検出方式における送信導体に供給される送信信号との間に周波数インターリーブの関係を備える。
(もっと読む)
位置と負荷の検出可能な流体圧アクチュエータ
【課題】ロッドの変位と当該ロッドに作用する負荷とを1台のセンサで検出できる流体圧アクチュエータを提案する。
【解決手段】ロッド2とピストン3との間に変位に応じた荷重を発生するスプリング4を配置し、ピストンとロッドとにそれぞれマグネット8,9を設け、磁歪式変位センサ7によってピストンとロッドとの軸方向距離及びロッドの軸方向位置を検出する。流体圧を受けてピストン3が移動すると、ロッド2にかかる負荷の大きさに応じてスプリング4が圧縮される。ロッドの負荷はスプリングの圧縮量に関係し、その圧縮量はピストンとロッドとの軸方向距離に比例し、この軸方向距離を変位センサで検出するので、結局、ロッドの負荷を求めることができる。ロッドの位置は変位センサによって直接検出できる。
(もっと読む)
回転角検出装置、モータ制御装置、および電動パワーステアリング装置
【課題】モータ等の回転機におけるロータの回転速度が変化しても現時点のロータ回転角を正確に推定できる回転角検出装置を提供する。
【解決手段】ホールセンサによるロータ回転角の離散的な検出結果から現時点のロータ回転角を示す回転角推定値θreを次のようにして求める。ロータ回転角が検出される毎にその前の検出時点ti-1から今回の検出時点tiまでの期間での平均的な角速度を示す角速度算出値ωc(i)を求める(i=0,1,2,…)。ロータ回転の加減速を考慮すべく、現時点の直前の検出時点tkで得られた角速度算出値ωc(k)を、その角速度算出値ωc(k)と更に前の検出時点tk-1で得られた角速度算出値ωc(k−1)との比に応じて補正することにより、角速度推定値ωeを求める。当該直前の検出時点tkから次の検出時点tk+1まで、この角速度推定値ωeを用いて回転角推定値θreを算出する。
(もっと読む)
移動情報測定システム及び移動情報測定方法
【課題】簡易かつ客観的に動体の移動情報を測定するシステム及び方法を提供すること。
【解決手段】移動情報測定システム動体の通路に沿って配置された複数の発電床と、複数の発電床の発電量を測定する電力測定装置と、複数の発電床の発電量を基に、通路における動体の移動に関する情報を測定する情報処理装置と、を備える。
(もっと読む)
電子的に支援された薬剤送達装置
本発明は、電子的に支援された薬剤送達装置に関する。薬剤送達装置は投与量データを検知するためのグレイコード型検出器を含むことができ、検出器は、交互の標識のシーケンスからなるコードトラック、およびコードトラックに沿って延びる方向に相互に離間して配置された複数の検出器を含む。薬剤送達装置は、投与量設定時に近位方向へ、投与量注入時に遠位方向へ移動する投与量セレクタを含んでもよく、投与量セレクタはラッチ掛け要素によって投与完了位置にラッチ掛けされる。ラッチ掛け要素は、投与完了状態を示すための投与完了スイッチを作動する。薬剤送達装置は、組み込み電子回路の消費電力を効果的に最小化する電力管理機能を組み込んでもよい。  (もっと読む)
(もっと読む)
検出システム及び検出方法、並びに制御装置及び制御方法
【課題】クランク軸の回転角度を精度良くかつ短時間で検出するために用いる信号を出力できる検出システム及び検出方法、並びにクランク軸の回転角度を短時間で精度良く検出できるだけでなく、エンジンを短時間で精度良く制御できる制御装置及び制御方法を提供する。
【解決手段】
クランク軸に設けられたロータの回転方向に所定の回転角度毎に形成された第1歯と第1歯と異なる形状の第2歯との通過を検出する検出装置から第1歯の通過を表す第1信号と第1歯又は第2歯の通過を表す第2信号とを取得する取得部と、取得部が取得した第1信号と第2信号とに基づいて第2歯の通過を判定する判定処理と、判定処理で判定した第2歯の通過に基づいて第2歯の形成されたロータが設けられたクランク軸の回転角度を検出する検出処理とを実行する制御部とを備える。これによれば、回転角度を短時間で精度良く検出できる。
(もっと読む)
表面形状認識センサ装置
【課題】小さな回路規模で高い生体判定精度を得る。
【解決手段】基準信号生成部4に、入力された周波数調整値42Sに応じた一定周波数の基準信号4Sを生成する可変周波数発振部41を設け、例えば表面形状認識センサ装置10の起動時など、第2のA/D変換部31でのA/D変換動作が実行される以前に、制御部25からの調整動作制御信号4Rに基づいて、基準信号4Sの周波数を調整するための周波数調整動作を実行し、カウント部43からの計数結果4Xが所定の許容範囲に収まるよう周波数調整値42Sを変更することにより、基準信号4Sの周波数を調整する。
(もっと読む)
自己動力供給式座標プローブ
【課題】自立型発電システムを備えた工作物表面上の点の座標を測定する工作機械または座標測定機械用の座標測定プローブを提供する。
【解決手段】工作機械12の回転スピンドル15に連結可能とし、巻線20を伴う固定子18との関係において相対的に回転する駆動要素であるフライホイール28および永久磁石19を担持した回転子17を有する発電機16を備え、工作機械12の回転スピンドル15を作動させることで発電機16が電気または電子回路である接触検出回路22に電力を供給する。
(もっと読む)
位置検出装置
【課題】軟水装置のカム駆動式コントロールバルブのカム位置を短時間で検出することのできる位置検出装置を提供する。
【解決手段】本実施形態に係る位置検出装置1は、カム60の回転軸61の端部に設けられた回転体10と、フォトインタラプタ20と、ホール素子30と、制御回路50と、を備えている。回転体10の外側端面には、フォトインタラプタ20によって検出される複数の切り欠き12が円周方向に所定の間隔で形成された切り欠き板11が設けられている。また、回転体10の外側端面には、回転軸61の回転に伴って回転移動し、ホール素子30によって検出される永久磁石15が設けられている。制御回路50は、フォトインタラプタ20とホール素子30の出力から、カム60の回転位置を検出する。
(もっと読む)
パルス信号発生装置、回転機、制御装置およびパワーウィンド制御装置
【課題】回転体の回転検出を無電源で、しかも低コストに実現可能な装置を提供する。
【解決手段】モータの回転に応じて磁気検出器24または26(より正確には磁性ワイヤ70)と、これに対向するマグネット22の磁極と、回転軸20とにより磁路が形成される。磁性ワイヤ70が大バルクハウゼンジャンプを起こしうる磁性体からなるため、モータの回転に応じて各磁気検出器に対向する磁極が切り替わるごとに磁路を形成する磁界の方向が急峻に切り替わり、磁気検出器からその切り替わりに応じたパルス信号が出力される。磁性ワイヤ70はマグネット22から受ける磁束密度の変化によってその磁化方向が切り替わるため、検出コイルが受ける磁束の変化による誘導起電力が発生し、磁気検出器からは無電源にてパルス信号の出力が可能になる。
(もっと読む)
切替電力供給ノイズの抑制を伴う磁歪変位変換器
変換器116は、磁歪要素102上の繰り返しパルス120を感知し、変換器出力バースト122を提供する。変換器回路126は、変換器出力バーストを検出する。エネルギー貯蔵デバイス130は、変換器回路の電力入力128に結合する。切替電力供給132は、エネルギー貯蔵デバイスに結合し、その間に切替電力供給の切替が抑制される繰り返し抑制状態を有する。シーケンス回路140は、変換器出力バーストとの切替電力供給の繰り返し抑制状態の同期化を提供する。 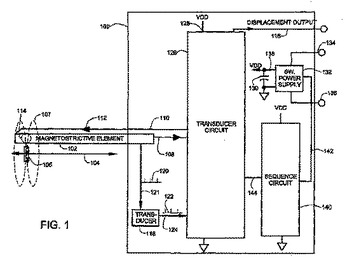 (もっと読む)
(もっと読む)
1 - 20 / 71
[ Back to top ]