
Fターム[2F063LA11]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 増幅回路 (104)
Fターム[2F063LA11]に分類される特許
61 - 80 / 104
位置計測方法及び位置計測装置
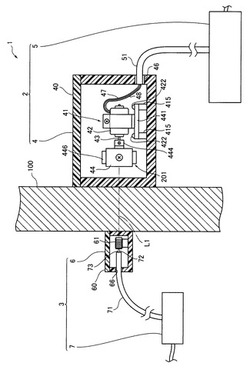
【課題】特定の位置を高精度で検出できる、又は、位置を検出し、その検出したことを容易に知らせることができる位置計測方法及び位置計測装置を提供する。
【解決手段】位置計測システム1を用いた位置計測方法によれば、モータ42の回転軸4
3を回転させることで一対の永久磁石44、45が回転し、回転する一対の永久磁石44
、45から発生する回転磁束は、前記モータ42の回転軸43の延長線上に検出コイル6
1の不感帯部を形成するので、用前記検出コイル61の位置を変えながら当該検出コイル
61に誘起された信号を測定することで特定の位置を高精度で検出できる。
(もっと読む)
回転角度検出装置

【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、誤差がなく、確実な検出が可能なものを提供することを目的とする。
【解決手段】四つの磁気抵抗19が略矩形状に接続された磁気抵抗素子17や18を、第一の検出体2や第二の検出体3中央の磁石4や5に対向配置すると共に、磁気抵抗素子17や18と制御手段32の間にスイッチング手段21〜24を設け、このスイッチング手段21〜24を制御手段32が切換え、一つのホイートストンブリッジから形成された磁気抵抗素子17や18からの正弦波と余弦波の出力信号によって、回転角度の検出を行うことによって、使用される周囲温度に係わりなく、誤差のない確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転検出器
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンに使用して好適な回転検出器を提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
測長機能付ボールペン
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンを提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
切替電力供給ノイズの抑制を伴う磁歪変位変換器
変換器116は、磁歪要素102上の繰り返しパルス120を感知し、変換器出力バースト122を提供する。変換器回路126は、変換器出力バーストを検出する。エネルギー貯蔵デバイス130は、変換器回路の電力入力128に結合する。切替電力供給132は、エネルギー貯蔵デバイスに結合し、その間に切替電力供給の切替が抑制される繰り返し抑制状態を有する。シーケンス回路140は、変換器出力バーストとの切替電力供給の繰り返し抑制状態の同期化を提供する。 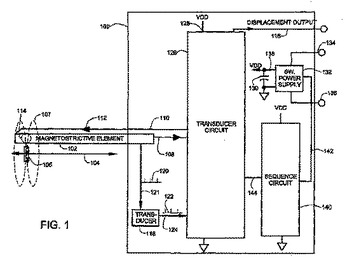 (もっと読む)
(もっと読む)
センサ信号検出回路及びセンサモジュール
【課題】製造コストが安価なセンサ信号検出回路を提供する。
【解決手段】検知結果に応じて2つの電圧信号を出力するセンサ2と接続され、2つの電圧信号の電圧差に応じたセンサ信号を出力するセンサ信号出力部6と、当該センサ信号から直流成分を除去するオフセット除去フィルタ8と、を含むセンサ信号検出回路である。
(もっと読む)
研磨監視方法および研磨装置
【課題】研磨装置の運転を停止させることなく渦電流センサの較正を行うことができ、精度の高い膜厚監視を可能とする研磨監視方法および研磨装置を提供する。
【解決手段】基板の水研磨時、研磨パッド10のドレッシング時、または研磨パッド10の交換時において、渦電流センサ50の出力信号を補正信号値として取得し、補正信号値から補正基準値を減算して補正量を算出し、導電膜を有する他の基板を研磨しているときの渦電流センサ50の出力信号から補正量を減算して実測信号値を算出し、実測信号値の変化を監視することにより研磨中の導電膜の厚さの変化を監視する。
(もっと読む)
非接触センサ
【課題】誘電体等の被検出物の位置を検出する静電容量型などの非接触センサにおいて、短時間で確実に所望の検出位置における最適なゲインとオフセットに調整できるようにする。
【解決手段】被検出物20がない第1の状態と、所定の距離に被検出物20がある第2の状態で、それぞれ同様に検出ゲインを変化させ、各ゲインにおいて所定の出力値となるようにオフセット値を調整し、当該オフセット値を格納し、第1の状態のオフセット値と第2の状態のオフセット値が最も近くなったときの当該ゲインおよびオフセット値を調整値とするようにした。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 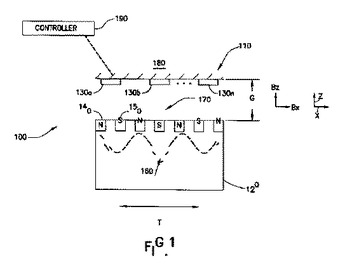 (もっと読む)
(もっと読む)
センサ付き転がり軸受装置の製造方法
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
多回転絶対角検出装置
【課題】360度以上の角度範囲内の絶対角度を高精度に検出可能な多回転絶対角検出装置を提供する。
【解決手段】機構部に、回転体1と、回転体1に従動する従動回転部材2と、従動回転部材2に従動して間欠的に回転する間欠回転部材3と、従動回転部材2に取り付けられた磁石4と、磁石4と対向に配置され、従動回転部材2の1回転を1周期とする正弦信号及び余弦信号を出力する磁気センサ5と、間欠回転部材3に形成された第1及び第2のコードパターン6,7と、これらの各コードパターン6,7に対向して配置された第1乃至第7の検出素子8〜14とを含む。検出素子8〜14の出力信号に基づいて回転体1の1回転を等分するセクタを識別し、正弦信号及び余弦信号から算出される逆正接値に基づいてセクタ内の絶対角を検出する。回転体1と従動回転部材2との間に、中間回転部材23を配置することもできる。
(もっと読む)
レール高さ検出方法、レール高さ検出機構およびレール高さ変位量測定装置
【課題】
差動コイルを用いた電磁式の検出器を利用して検出器からのレール高さを特性グラフを参照して処理をすることで測定するレール高さ検出方法およびレール高さ検出機構を提供することにある。
【解決手段】
この発明は、隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルを有しレールの頭部の上部に対応させて軌道検測車に設けられた電磁センサから第1、第2の空芯コイルのそれぞれの検出信号を得て第1、第2の空芯コイルの検出信号の和信号と差信号との比に基づいて電磁センサのレールに対する走行方向に直交する方向のずれ量を得て第1、第2の空芯コイルの検出信号の和信号と電磁センサのレールに対する高さとの関係を示す特性グラフを参照してずれ量に対応する特性グラフに基づいて電磁センサのレールに対する高さを得るものである。
(もっと読む)
膜厚測定装置
【課題】長尺帯状や長大な検査試料に対して簡単な構成で容易に且つ正確に膜厚を測定する。
【解決手段】ポリエステルフィルム11に導電性薄膜が形成された検査試料に対して当該導電性薄膜の膜厚を測定する膜厚測定装置である。ローラ検査部2に、前記ポリエステルフィルム11の表面に対して、設定された隙間を隔てた状態で支持される検査ヘッド10と、前記ポリエステルフィルム11の導電性薄膜と前記検査ヘッド10との間に介在した状態でローラ検査部2の外周に設けられると共に前記導電性薄膜に直接的に又は間接的に接触して当該導電性薄膜と前記検査ヘッド10との間隔を設定間隔に支持する隔離膜14とを備えて構成した。
(もっと読む)
磁気共鳴力顕微鏡
【課題】MRI像の理解を一層深めることのできる磁気共鳴力顕微鏡を提供する。
【解決手段】高周波磁場発生装置31が試料21の全体に均一に発生した高周波磁場中で、カンチレバー自己励振ループ部が前記カンチレバー23を自己励振した状態で、試料21(検体)のスピンを制御して磁気共鳴力を発生させ、周波数復調器26が磁気共鳴力に基づいた前記カンチレバー変位計測器29の検出信号から前記カンチレバーの共振周波数を計測し、かつカンチレバーの共振周波数シフトを計測し、カンチレバーの共振周波数のシフト量の直流成分Δνが一定となるようにスキャナー22を制御して試料21表面から探針24先端までの距離Zを調整して、試料21の原子間力像(AFM)をスキャナー駆動電源25が生成し、周波数復調器26での前記カンチレバーの共振周波数シフト量の交流成分δνに応じて磁気共鳴力像(MRFM)を位相検波器34が生成する。
(もっと読む)
活性化デバイス
活性化プロセスが、指紋の山および谷の通過を検出し、対応する電気信号を生成する。電気信号はフィルタリングされて、フィルタリング電気信号を生成し、フィルタリング電気信号の平均レベルが閾値を超える場合に、活性化信号が生成される。  (もっと読む)
(もっと読む)
少なくとも3つのひずみゲージを備える変形センサベアリング
本発明のベアリングは、回転時に引き起こされる固定レースの1つの領域の変形による擬似正弦波の振幅Aを判定するための判定システムであって、少なくとも3つのひずみゲージ(7)からなる少なくとも1つの判定システムと、各ゲージ(8)で生成された信号の時間的変動にそれぞれ依存した3つの信号Viを測定して、それぞれ同じ角度および同じ振幅を有する2つの信号SIN,COSを形成することができる測定デバイスと、領域(7)の変形の振幅Aを時間の関数として計算するための計算デバイスであって、式SIN2+COS2を計算することにより振幅Aを推定するように構成された計算デバイスとを備える。 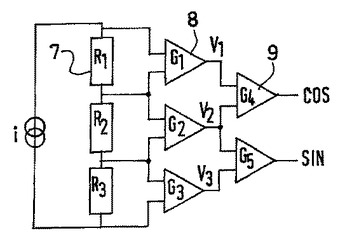 (もっと読む)
(もっと読む)
変位方向検出装置
【課題】粘弾性部材を用いて、移動部材20が固定部材11、12に対して少なくとも直交2軸方向へ相対変位する場合に、移動部材20の相対変位方向を検出することができる変位方向検出装置を提供する。
【解決手段】上側固定部材11と移動部材20との間に第1粘弾性部材31を配置し、下側固定部材12と移動部材20との間に第2粘弾性部材32を配置する。そして、第1粘弾性部材31のインピーダンスZ1と第2粘弾性部材32のインピーダンスZ2との差に基づき、移動部材20が上下方向へ変位したのか、それとも、左右方向へ変位したのかを判断する。
(もっと読む)
移動距離計測装置および移動距離計測方法
【課題】 移動体の構造物に対する相対移動距離を、簡易に高い信頼性で測定する。
【解決手段】 移動体31の導電性の構造物2に対する相対移動距離を測定する移動距離計測装置において、移動体31と一体となって移動し、交流電圧が負荷される移動検出用励磁コイル3と、移動検出用励磁コイル3に対して移動体31の移動方向の前方および後方に配置された、移動体31と一体となって移動する少なくとも2つの検出コイル4a,4bと、検出コイル4a,4bに発生した励起電圧の振幅比および位相差に基づいて、移動体31の構造物2に対する相対移動距離を算出し、移動検出用励磁コイル3に負荷された電圧に対する励起電圧の振幅比に基づいて、移動体31と構造物2との距離を求め、相対移動距離を補正する移動距離演算手段を有する。
(もっと読む)
埋設電流搬送導体が所定の最小深さの上に埋設されているか否かを判定するための方法および装置
電流搬送導体を検出するための検出器(1)は、専用の信号送信機によって導体に誘導される主電源または電磁信号の一方または双方の結果として電流搬送導体によって生成される電磁放射を検出するために、垂直の間隔を置いた一対のアンテナ(3,5)を具備する。検出器(1)は、埋設導体の深さを継続的に計算し、埋設導体が所定の最小深さの上にある場合は、聴覚および/または視覚アラームをトリガする。アンテナ(3,5)の感度を低下させることによって、アラームが鳴る横方向へのオフセット範囲が縮小され、埋設導体の位置を判定することができる。  (もっと読む)
(もっと読む)
ポインティングデバイス,モーションセンサー並びに文字認識装置および位置データ演算方法
【課題】 磁気センサーにより画面上の特定位置を指定する磁気検出型入力デバイスにおいて、ホール素子の個数を少なくし、簡素かつ小型で一定の磁気検出精度を発揮させる。
【解決手段】 磁気ペン10によって描画されるパレット12と、Z軸方向と交叉する交叉面上の中心位置C2とパレット12上の中心位置C1とが同軸に配置され磁気ペン10の3軸各磁気成分に応じた3つの計測データを出力する磁気センサー14と、仮想パレット12上の中心位置を原点に設定し磁気センサー14から出力された3つの計測データと予め計測した3つの基準データとの各変化量を表す3つの磁気ベクトルのそれぞれに基づいて、磁気ペン10の位置データを計算する演算処理部5とをそなえて構成する。
(もっと読む)
61 - 80 / 104
[ Back to top ]