
Fターム[2F063LA29]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | ホールド回路、記憶回路 (153)
Fターム[2F063LA29]に分類される特許
1 - 20 / 153
回転角度検出装置
検出装置および光学装置
壁厚検査方法、タービン翼、校正用具および渦電流検出システム
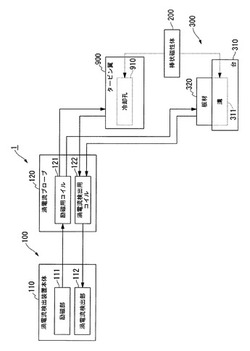
【課題】タービン翼に設けられた孔の位置の検査をより簡単に行えるようにする。
【解決手段】タービン翼900の冷却孔910に棒状磁性体200を挿入して、タービン翼900の表面から渦電流プローブの走査を施して渦電流検出を行う渦電流検出工程の前に、棒状磁性体200を溝に挿入してタービン翼900の壁厚判定基準厚みを有する板材320を介して棒状磁性体200に対して渦電流検出を行うことにより、渦電流プローブ120の校正を行う。これにより、検査者は、渦電流検出を行って容易な判定を行うことで、冷却孔910の位置の検査をより簡単に行うことができる。
(もっと読む)
角度検出装置、モータ駆動装置及び画像形成装置

【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
(もっと読む)
信号レベル測定回路およびそれを備えた変位計測装置
【課題】温度特性を改善することができる信号レベル測定回路およびそれを備えた変位計測装置を提供する。
【解決手段】変位計測装置10は、ギャップセンサ13、ギャップ長振幅特性テーブル14、信号レベル測定回路20を備え、信号レベル測定回路20は、カウンタ22、ADコンバータ23、CPU24を備え、カウンタ22は、ギャップセンサ13の出力信号の振幅が安定したことを正弦波信号の波数を計数することにより検出してトリガ信号をCPU24に出力し、CPU24は、トリガ信号を入力した後、遅延時間Δtの経過後にリード信号をADコンバータ23に出力し、ギャップセンサ13の出力信号の1周期期間内に予め定められた測定点の信号レベルを測定し、ギャップ長振幅特性テーブル14を参照してギャップ長Gのデータを取得する構成を備える。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法
【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
ケーブル操作装置
【課題】ドアなどの移動対象物の移動位置を直接測定し、その移動位置に基づいて移動対象物の移動を制御するケーブル操作装置を提供する。
【解決手段】第1の接触ポイント51と第1ケーブル11の端部がアーム7に接続されている接続点60との間の第1ケーブル11の部分の抵抗値R1と、第2の接触ポイント53と第2ケーブル12の端部がアーム7に接続されている接続点61との間の第2ケーブル12の部分の抵抗値R2と、アーム7の接続点60と接続点61との間の抵抗値R3との合計値(R1+R2+R3)の抵抗値を測定する。スライドドアを開閉すると、第1ケーブル11と第2ケーブル12とは往復動することで、第1の接触ポイント51と第2の接触ポイント53との間のR1、R2、R3の合計の抵抗値が変化する。この変化した抵抗値は、スライドドアの移動位置に対応している。
(もっと読む)
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
回転デバイス用センサ組立体および製作方法
【課題】高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサおよび製作方法を提供する。
【解決手段】センサ組立体40は、ハウジング内の空洞を画定する内面を含んでいるハウジングと、空洞の中に配置された近接センサ42とを含む。近接センサ42は、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
(もっと読む)
位置検出ユニット、及びそれを備えたレンズユニット、カメラ、及びレンズユニットの製造方法、位置検出方法
【課題】起動時において検出対象物を所定の基準位置まで移動させることなく、絶対的な位置を検出することができる位置検出ユニットを提供する。
【解決手段】本発明は、位置検出ユニットであって、検出対象物(16)の変位に対し、単調に増加又は減少する単調信号を出力する第1センサ(20)と、検出対象物の変位に対して互いに位相がずれた2つの正弦信号を出力する第2センサ(24)と、検出対象物の位置に対する単調信号を記憶する第1記憶部(26)と、各正弦信号の極大値及び極小値を記憶する第2記憶部(26)と、検出された単調信号及び記憶された単調信号データに基づいて、検出対象物が正弦信号の何周期目に位置するかを特定すると共に、検出された正弦信号及び記憶された極大極小データに基づいて、特定された周期内における検出対象物の位置を計算し、絶対的な位置を求める位置演算部(28)と、を有することを特徴としている。
(もっと読む)
ひずみゲージ用ブリッジボックス
【課題】 取り換えを要するひずみゲージおよび当該ひずみゲージに接続されたリード線の取り換え作業を確実かつ容易にすること。
【解決手段】 被測定物の、どの測定個所のひずみゲージを交換すべきかについては、CPU24で解析され、I/O25を介して出力された各チャネル対応のひずみ量に関する数値データと、ひずみゲージと測定個所との対応表等とを参照することで特定する。被測定物の現場作業者は、特定された被測定個所のひずみゲージを、新しいひずみゲージに交換し、そのリード線13をLED12が点灯したブリッジボックス1において、当該リード線13の古い方を取り外し、交換したひずみゲージが接続された新しいリード線13をコネクタに接続する。
(もっと読む)
車両用制御装置
【課題】この発明は、車輪速から操舵角を推定することができ、舵角検出手段を搭載していない車両でも操舵角を推定して、操舵角情報を必要とする全ての制御を実行することが可能な車両用制御装置を実現することを目的とする。
【解決手段】この発明は、左車輪速を検出する左車輪速検出手段と、右車輪速を検出する右車輪速検出手段と、左車輪速と右車輪速とから左右輪回転差を算出する左右輪差算出手段と、左車輪速と右車輪速とから車速を算出する車速算出手段と、左右輪回転差と車速とに基づいて推定操舵角を演算する推定操舵角演算手段と、推定操舵角を更新するかどうかを判定する推定操舵角更新判定手段とを備えた推定操舵角計算手段を設けることを特徴とする。
(もっと読む)
移動体システムと移動体の位置検出方法
【課題】
カーブ区間で移動体の位置を正確に求める。
【構成】
移動体に被検出用の磁石の列が設けられ、移動体の走行方向に沿っての検出範囲の長さが磁石の列の長さよりも短い磁気式変位センサが、移動体が走行する軌道の少なくともカーブ区間に複数個間隔を空けて配置されている。移動体の位置に応じて、複数個の変位センサを順番に切り換えるように選択することにより、移動体の位置を求める統合ユニットが設けられている。
(もっと読む)
磁気式変位センサと変位検出方法
【課題】
永久磁石の列とコイルの列との相対速度が磁気式変位センサの出力に影響しないようにすると共に、永久磁石の列の長さを短くできるようにする。
【構成】
磁気式変位センサが、変位の検出方向に沿って、同数のコイルから成り、かつ変位の検出方向に沿っての列の始まりと終わりの位置が等しい少なくとも2列のコイルの列と、永久磁石の列とを備え、永久磁石の列とコイルの列との相対速度と、永久磁石の列からの磁界とによる変位センサの出力への影響を、少なくとも2列のコイルの列間でキャンセルする。
(もっと読む)
静電容量式検出装置
【課題】センサ面内の全域に亘って検出感度の差を低減でき、しかもマルチポイントの検出を精度よく実現できる静電容量式検出装置を実現すること。
【解決手段】本発明の静電容量式検出装置(1)は、隣接電極間で静電容量が形成されるように、センサ基板(11)に配設された複数の検出電極(12)を具備し、センサ基板(11)の相対的に検出感度が低い角部検出領域(A2)に形成される静電容量を、相対的に検出感度が高い中央検出領域(A1)に形成される静電容量に対して相対的に大きくしたことを特徴とする。
(もっと読む)
導電体センサ及び導電体の検出方法
【課題】少なくとも2つの導電体のそれぞれの位置を特定可能なセンサを提供する。
【解決手段】第1及び第2の磁界を放射する磁界放射器1と、第1及び第2の導電体に第1の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第2の関係と、を保存する記憶装置401と、第1の測定対象導電体2及び第2の第1の測定対象導電体2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき算出された、第1及び第2の導電体の位置の第3の関係と、第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき算出された、第1及び第2の導電体の位置の第4の関係と、に共通する、第1及び第2の導電体の位置を特定する特定部303と、を備える導電体センサ。
(もっと読む)
導電性膜センサ及び導電性膜の検出方法
【課題】導電性膜の位置及び特性を特定可能な、導電性膜センサを提供する。
【解決手段】周波数が異なる第1及び第2の磁界を放射する磁界放射器1と、導電性膜に第1の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第2の関係と、を保存する記憶装置401と、測定対象導電性膜2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき、導電性膜の位置及び特性の第3の関係を算出し、測定対象導電性膜2に第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき、導電性膜の位置及び特性の第4の関係を算出する算出部301と、第3及び第4の関係に共通する、導電性膜の位置及び特性の組み合わせを特定する特定部303と、を備える導電性膜センサ。
(もっと読む)
操作入力装置及び操作入力検出装置
【課題】操作部に作用する操作入力を検出する機能と操作部に振動を与える機能を単純な構成で実現できる、操作入力装置の提供。
【解決手段】コイル11と、操作入力の作用によりコイル11の軸方向に変位する操作部12と、操作部12の変位により、コイル11との位置関係が変化するコア13と、コイル11の外側に配置されたヨーク14と、コア13とヨーク14に流れる磁束を発生させるマグネット15とを有し、コイル11は、操作部12の変位量に応じた信号を出力し、操作部12は、コイル11に流れる電流とマグネット15の磁束によって可動する、ことを特徴とする、操作入力装置。
(もっと読む)
真空用モーター、真空用ロボット
【課題】真空排気装置に接続された空間に不純物ガスを放出しない真空用モーターと真空用ロボットを提供する。
【解決手段】
筒部材11と、回転軸12と、磁石14と、コイル15と、信号を生成する符号が、回転軸12の中心軸線を中心とする円周に沿って表面に配置された回転板21aと、信号を検出できるセンサ22aとを有し、回転板21aが配置された空間は真空排気装置42に接続されて真空排気される真空用モーター10aであって、内部にセンサ22aが配置されたセンサ室24aと、信号を透過する透過窓23aとを有し、透過窓23aはセンサ室24aの開口を塞ぐように設けられ、センサ室24の内部空間は回転板21aが配置された空間から分離され、センサ22aから放出された不純物ガスは真空排気装置42に接続された空間に放出されない。
(もっと読む)
1 - 20 / 153
[ Back to top ]