
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
261 - 280 / 1,861
車両ホイールへのタイヤ着座具合を検査する方法及び装置
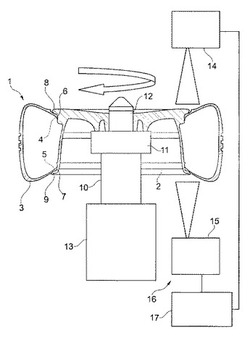
【課題】車両ホイールへのタイヤの着座具合を点検する方法及び装置を提供する。
【解決手段】車両ホイール(1)のリム(2)に取り付けられたチューブレスタイヤ(3)の着座具合を点検するため、車両ホイール(1)のリム(2)を回転マウントの中心に締結した状態で車両ホイールを少なくとも1回転、その回転軸線回りに回転させる。ホイールの回転中、リム(2)の半径方向外縁領域及びタイヤ(3)の隣接領域の外側輪郭を距離測定装置によって走査し、リム(2)とタイヤ(3)との軸方向距離の差を検出して評価する。
(もっと読む)
形状測定方法及び形状測定装置

【課題】ダイナミックレンジの広いZ方向範囲の高速な測定及びこれによる測定時間の短縮。
【解決手段】光源から被測定対象までの第1光路長と光源から参照面までの第2光路長との光路長差によって変化する被測定対象の干渉光強度分布画像を、撮像手段で撮像する第1の工程と、第1光路長と第2光路長の光路長差を光路長差変更手段で全走査区間に亘って変化させながら、全走査区間内に部分的に設定された複数の測定区間の干渉光強度分布画像を画像記憶手段に順次記憶する第2の工程と、画像記憶手段に記憶された各測定区間の干渉光強度分布画像の各測定位置における光路長差の変化に伴う干渉光強度の変化を示す干渉光強度列から、全走査区間における干渉光強度列のピーク位置を求め、このピーク位置から被測定対象の各測定位置における光軸方向の位置を求める第3の工程とを有する。
(もっと読む)
センサヘッド、および光学式センサ
【課題】センサヘッドに起こった環境状態の異常を検知することができる光学式センサを実現する。
【解決手段】本発明に係る光学式圧力センサ1のセンサヘッド2は、光源5から発せられた光を伝送する出射用光ファイバ10と、出射用光ファイバ10の端面に対する相対位置が圧力に応じて変位し、出射用光ファイバ10の端面から出射された光を反射する反射板15と、反射板15が反射した光が入射される端面を有し、入射した光をそれぞれ第1および第2光検出器6・7に伝送する第1受光用光ファイバ11および第2受光用光ファイバ12とを備え、さらに、センサヘッド2内の湿度の変化に応じて、出射用光ファイバ10の伝送損失を変化させる損失変化部16を備える。
(もっと読む)
画像処理装置、画像処理方法、撮像装置及びプログラム
【課題】 合焦状態(ピント位置)の異なる複数枚(複数チャンネル)の画像から被写体までの距離を推定し、ドクターに診断上の様々な価値を提供する画像処理装置、画像処理方法、撮像装置及びプログラム等を提供すること。
【解決手段】 画像処理装置は、合焦状態が異なる複数の画像を取得する画像取得部と、取得された複数の画像について、注目領域に対して設定される基準点の設定処理を行う基準点設定部351と、複数の画像について、基準点に対応する画素値に基づいて、基準点に対応する実空間上の対応点までの距離情報を推定する距離推定部352と、推定された距離情報に基づいて、基準点が設定された注目領域に対して付加される情報である付加情報を生成する付加情報生成部356と、を含む。
(もっと読む)
形状評価方法
【課題】光制御板に形成された凹凸形状を簡易に評価することが可能な形状評価方法を提供する。
【解決手段】凹凸形状13が形成された第1の面11と当該第1の面11と反対側に位置する第2の面12とを有し、凹凸形状13が第1の方向11に延在しているサンプル光制御板1の凹凸形状13を評価する形状評価方法は、第1の面11から光を入射した場合の第1の全光線透過率Tt1及び第2の面12から光を入射した場合の第2の全光線透過率Tt2の少なくとも一方を用いて規定される指標を凹凸形状13を表す指標とし、サンプル光制御板1に対して、第1及び第2の全光線透過率Tt1,Tt2の少なくとも一方を測定して上記指標を取得する取得工程と、凹凸形状が既知の基準光制御板に対して予め取得した指標と凹凸形状との相関関係に基づき、取得工程で取得した上記指標から、サンプル光制御板1の凹凸形状13を評価する評価工程とを有している。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】照明部と撮像部の校正時からの変化を異常として検知する。
【解決手段】対象物体の三次元形状モデルの情報を保持する保持部と、撮像部により撮像された対象物体の距離情報を取得する距離情報取得部と、撮像部により撮像された対象物体の濃淡画像を取得する濃淡画像取得部と、保持部に保持された三次元形状モデルの情報と、距離情報とに基づいて対象物体の位置および姿勢を推定する第1位置姿勢推定部と、保持部に保持された三次元形状モデルの情報を濃淡画像上に投影した投影情報と、濃淡画像の幾何特徴とに基づいて対象物体の位置および姿勢を推定する第2位置姿勢推定部と、第1位置姿勢推定部により推定された第1推定値と第2位置姿勢推定部により推定された第2推定値との差分値が閾値より大きいか判定する判定部と、判定部により差分値が閾値より大きいと判定された場合に、撮像部による撮像条件の校正が必要な状態であることを報知する報知部と、を備える。
(もっと読む)
ホーム転落検知システム
【課題】駅ホーム上でホーム縁に沿って旅客がホームと連射との間に転落した事故が生じた時に、これを高い精度で迅速かつ確実に自動的に検知することができるホーム転落検知システムを提供する。
【解決手段】ホーム転落検知システムは、列車が入線する駅ホームのホーム縁に沿って当該ホーム縁の上方位置に設置され、所定の時間間隔で設定された計測時刻毎に、それぞれ設定された検知エリアに係る検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像に係るデータを記憶するステイタスメモリ41と、ステイタスメモリに記憶された旅客像に係るデータに基づき旅客像の存在の有無に係るデータを取得し、このデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客のホーム転落状態が発生したと判定するホーム転落判定部52とを備える。
(もっと読む)
光センサー
【課題】光センサーの光学系において、1/4波長板が高温、高熱の使用条件下でも安定して確実に直線偏光を円偏光に変換でき、良好なセンサー感度、高いセンサー精度を確保維持する。
【解決手段】振動検出用光センサー1は、直線偏光のレーザー光を出力する光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び振動板8からの反射光を検出する光検出器6を備える。波長板ユニットは、1/4波長板7と振動板とが一体化されている。1/4波長板は、一方の主面に一方向に周期的な凹凸形状9aを有する透明基板9と、透明基板と同じ周期的な凹凸形状を有しかつ屈折率の異なる2種類の誘電体薄膜10a,10bを交互に積層した光学多層膜である周期構造体10とからなるフォトニック結晶構造の波長板である。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び1個の受光素子6を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造である。受光素子はその光軸x2を反射光の光軸x1と平行かつ僅かにずらして配置され、入射するビームスポット形状がその中心cを受光面6aの中心Oから僅かにずらした位置に投影されるので、検出される光量が振動板の変位に対応して増減する。
(もっと読む)
3次元環境生成システム
【課題】大規模点群データのCGモデルへの置き換えを、少ない計算量及び少ない誤差で行う。
【解決手段】環境内の3次元形状を計測した反射強度付き点群データと、マーカ付き3次元CGモデル群を入力し、前記反射強度付き点群データから算出したマーカ配置と、入力したマーカ付き3次元CGモデル群のマーカ配置との照合処理により、類似配置のマーカを持つ3次元CGモデルを抽出するモデル候補抽出部と、反射強度付き点群データから算出したマーカ配置に、前記抽出マーカ付き3次元CGモデルのマーカをあわせることにより、最も照合誤差の少ない3次元CGモデルを該当3次元CGモデルとして、3次元環境モデルとして出力する点群-CG置換部、とを備える。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
廃棄物処分場における廃棄物の管理システム
【課題】廃棄物処分場に埋め立て処分された廃棄物を、どの位置に、どのような種類の廃棄物があるのかを容易に把握し、再利用を容易にする。
【解決手段】廃棄物処分場45に搬入された廃棄物の種類を含む廃棄物情報を取得する廃棄物情報取得部と、前記取得した廃棄物情報を記憶する廃棄物情報記憶部と、前記搬入された廃棄物が、前記廃棄物処分場内に投入された箇所の平面的な位置情報及び高さ情報を含む投入位置情報を取得する投入位置情報取得部と、前記取得した投入位置情報を、該当する廃棄物の廃棄物情報に関連付けて前記廃棄物情報記憶部に記憶する位置情報記憶部とを備える。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 安定的に検査領域を特定することが可能な画像処理装置及び外観検査方法を提供する。
【解決手段】 濃淡画像を取得する濃淡画像取得手段110と、距離画像を生成する距離画像生成手段130と、濃淡画像と距離画像の一方の画像において、他方の画像上で検査範囲に相当する検査領域を特定するための特定パターンを検出する特定パターン検出手段150と、濃淡画像と距離画像の他方の画像において、特定パターン検出手段により検出された特定パターンの位置及び傾斜角度の少なくとも一方に基づいて、検査領域を特定する検査領域特定手段170と、特定された検査領域から特徴量を算出する特徴量算出手段180と、算出された特徴量に基づいて、ワークの良否を判定する判定手段190と、を備える。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】表面の凹凸、輪郭線近傍の欠陥等の存在を高い精度で検出することができ、良品判定を確実に行うことができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】撮像手段で撮像された、良品に関する複数の第一の多値画像を取得し、取得した第一の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第一の距離画像を生成する。生成した第一の距離画像の画素ごとの濃淡値の、良品判定を行うための分布範囲を算出する。判定対象物に関する第二の多値画像を取得し、取得した第二の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第二の距離画像を生成する。生成した第二の距離画像の画素ごとの濃淡値が対応する分布範囲に含まれているか否かを判断する。
(もっと読む)
車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム
【課題】料金所内に前後車両が接近して入ってきたとき、前後車両の撮像画像から通信可否を判定する。
【解決手段】前方車両の前部画像を撮影する車両撮影手段11と、撮影された画像などから車両を検出する車両検出手段21と、撮影された前方車両の前部画像に映るフロントガラス底辺の画像位置に基づき前記無線受信器から前記前方車両のフロントガラス底辺までの水平距離の他、フレームレートとガラス底辺画像の変化から速度を求める距離演算手段22と、前方車両の車両サイズ(車両長さ,後部高さ)を取得する車両サイズ取得手段23と、前方車両の速度と水平距離+車両長さとを用いて、前後車両の車間距離を推定し、後続車両でのDSRC通信による料金収受データの受信不可(隠れ)を判定する隠れ発生有無判定手段24とを備えた車両間隔検出システムである。
(もっと読む)
マーク読み取り装置、および方法
【課題】特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供する。
【解決手段】布片Tを撮影するカメラ11と、撮影した布片画像を処理する画像処理装置とを備える。布片画像の明度勾配方向θを演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、布片画像の明度勾配方向θに一番近似する明度勾配方向を有するテンプレート画像に対応する種類を、布片Tの種類と判断する。織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
(もっと読む)
高輝度点光源用の蛍光体ホイール構成
【課題】可動基板上に改良された発光蛍光体構造を有する蛍光体点光源を提供する
【解決手段】蛍光体点光源素子は、基板と、基板上に配置された発光蛍光体粒子を備えることで、動作トラック領域の平坦な動作表面の近くに密集状態の粒子配置を有する円形の動作トラックを提供する。動作トラック領域は、高輝度点光源を提供する点において照射されながら回転される。密集状態の粒子配置は、キャビティ内の蛍光体粒子を回転させてキャビティ周辺の基板上で蛍光体を圧縮することにより、または他の機械的な圧縮方法により達成され得る。密集状態の粒子配置を、キャビティを囲む形成要素に当てて圧縮するか、機械加工することにより、平坦な動作表面を提供することができる。蛍光体粒子に浸透した接着結合剤を硬化させることで、密集状態の粒子配置を固定することができる。
(もっと読む)
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
261 - 280 / 1,861
[ Back to top ]