
Fターム[2F065AA22]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 1方向の (823)
Fターム[2F065AA22]に分類される特許
101 - 120 / 823
2光束アッセンブリ及びクロマティックポイントセンサ装置の動作方法
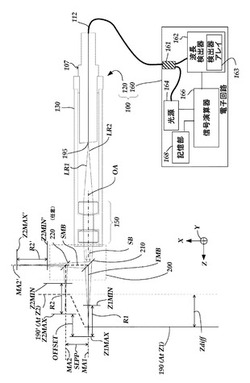
【課題】2つの表面領域を同期測定できるクロマティックポイントセンサ装置(CPS装置)の動作方法を提供すること。
【解決手段】2光束アッセンブリが取り付けられた1光束CPS光学ペンを用いたセンサ装置の第1測定光束および第2測定光束を、それぞれ第1表面領域および第2表面領域に位置合わせする。2つの反射光が2光束CPSの共焦点開口部を通過する。第1測定光束および第2測定光束にそれぞれ起因する第1測定および第2測定を含んだ少なくとも1の測定セットを実行する。様々な位置での測定セットの実行のため、少なくとも第1表面領域を移動させる。各測定結果は、極めて良好な分解能(例えば、少なくとも10nmの分解能)で決定される。本センサ装置と動作方法は、干渉計または他の高額で複雑な構成要素を使わないで、高い分解能と精度を必要とする測定に適用できる。
(もっと読む)
近赤外線吸収性能の面分布測定方法、及び近赤外線吸収フィルタの製造方法

【課題】近赤外線吸収性能の面均一性を容易に測定できる、近赤外線吸収性能の面分布測定方法と、この測定方法を利用した近赤外線吸収フィルタの製造方法を提供する。
【解決手段】透明基材シート2上に近赤外線は吸収し且つ可視光は吸収しない近赤外線吸収層3を積層した帯状の近赤外線吸収フィルタ1に対して、搬送させながら、その幅方向TD及び流れ方向MDに亘る所定領域面A毎に、近赤外線光源5からの透過光の面分布を、近赤外線領域に感度を有する二次元イメージセンサ5による二次元画像として撮影し、画像処理装置7で画像処理して、その輝度分布から近赤外線吸収性能の面分布を測定し、ディスプレイ8に表示する。更に、判定基準に従い面分布の不良品と良品とをマーキング等で識別できる様にすると良い。この方法を用いて、近赤外線吸収フィルタを製造する。
(もっと読む)
光学デバイス
【課題】視差ずれを容易に低減可能な画像を撮像できる光学デバイスを提供すること。
【解決手段】光学デバイスは、撮像光に対して第1の光学特性を持つ少なくとも1つの第1レンズを有する第1撮像系と、撮像光に対して第2の光学特性をそれぞれ持ち、互いに異なる光軸を持つ複数の第2レンズを有する第2撮像系とを備え、複数の第2レンズのそれぞれの光軸は、第1レンズの光軸位置の重心を中心として同心円上に位置し、複数の第2レンズの光軸位置の重心が第1レンズの光軸位置の重心に位置する。複数の第2レンズを通じて撮像された複数の画像を重ね合わせた重ね合わせ画像と、第1撮像系で得られた画像とを合成してよい。
(もっと読む)
形状評価方法
【課題】光制御板に形成された凹凸形状を簡易に評価することが可能な形状評価方法を提供する。
【解決手段】凹凸形状13が形成された第1の面11と当該第1の面11と反対側に位置する第2の面12とを有し、凹凸形状13が第1の方向11に延在しているサンプル光制御板1の凹凸形状13を評価する形状評価方法は、第1の面11から光を入射した場合の第1の全光線透過率Tt1及び第2の面12から光を入射した場合の第2の全光線透過率Tt2の少なくとも一方を用いて規定される指標を凹凸形状13を表す指標とし、サンプル光制御板1に対して、第1及び第2の全光線透過率Tt1,Tt2の少なくとも一方を測定して上記指標を取得する取得工程と、凹凸形状が既知の基準光制御板に対して予め取得した指標と凹凸形状との相関関係に基づき、取得工程で取得した上記指標から、サンプル光制御板1の凹凸形状13を評価する評価工程とを有している。
(もっと読む)
刃先の検査装置
【課題】チップコンデンサやチップ抵抗、二次電池内部の積層電極用アルミニウム箔の製造等に用いて好適な切断装置の刃物の刃先の検査装置を提供する。
【解決手段】光源20からの光を直立して配されている刃物の側面の第1の研削面11、第2の研削面12、第3の研削面13を横切るように照射しながら移動させる。そして上記刃物に対して側方において、光軸が水平な状態で配されたCCDカメラ22によって各研削面11、12、13からの反射光を検出し、そのピークから反射面の数を、ピークの幅から各研削面の幅を、またピークが現れる角度から研削面の角度をそれぞれ検出する。またCCDカメラ22に取込まれた画像によって、各研削面の表面性状を観察する。
(もっと読む)
ホーム転落検知システム
【課題】駅ホーム上でホーム縁に沿って旅客がホームと連射との間に転落した事故が生じた時に、これを高い精度で迅速かつ確実に自動的に検知することができるホーム転落検知システムを提供する。
【解決手段】ホーム転落検知システムは、列車が入線する駅ホームのホーム縁に沿って当該ホーム縁の上方位置に設置され、所定の時間間隔で設定された計測時刻毎に、それぞれ設定された検知エリアに係る検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像に係るデータを記憶するステイタスメモリ41と、ステイタスメモリに記憶された旅客像に係るデータに基づき旅客像の存在の有無に係るデータを取得し、このデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客のホーム転落状態が発生したと判定するホーム転落判定部52とを備える。
(もっと読む)
形状検査装置及び形状検査方法
【課題】一度のスリット光の走査により、任意の断面線における断面形状を検査することができる形状検査装置及び形状検査方法を提供する。
【解決手段】撮像光学系12を用いて被検査物20の形状を検査する形状検査装置10であって、被検査物20にスリット光を投射する投射手段13と、スリット光の走査により被検査物20上に順次形成される形状線を撮像する撮像手段14と、順次形成された各形状線の撮像データに基いて、被検査物20の三次元形状を点群データとして取得する点群データ取得手段と、点群データに基いて表示された被検査物に、入力に応じて切断線を設定する切断線設定手段と、切断線に対応した点群データにより、切断線における被検査物20の断面形状を算出する断面形状算出手段とを備えている。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び1個の受光素子6を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造である。受光素子はその光軸x2を反射光の光軸x1と平行かつ僅かにずらして配置され、入射するビームスポット形状がその中心cを受光面6aの中心Oから僅かにずらした位置に投影されるので、検出される光量が振動板の変位に対応して増減する。
(もっと読む)
エッチングモニタリング装置
【課題】画像処理によらず、測定位置を適切に調整することができるエッチングモニタリング装置を提供する。
【解決手段】本発明に係るエッチングモニタリング装置は、光源10から被処理基板S上に導入される入射スポット光の照射位置を移動させるための微小移動ステージ16と、被処理基板S上を入射スポット光の光径以下の間隔で走査した照射位置の各々に対し、CCDラインセンサ18により取得される検出信号から干渉成分の強度を取得する干渉強度取得部25と、干渉強度取得部25により取得された干渉成分の強度に基づき、その強度が最大となる被処理基板S上の位置を探索し、その位置をエッチング深さの測定位置とするよう照射位置を移動させる測定位置決定部26と、を有することを特徴とする。
(もっと読む)
回転工具と被加工物間の間隙長さ測定方法及びシステム
【課題】回転中の工具と被加工物間の間隙を直接測定する手法を確立する。
【解決手段】回転工具とそれに対向配置した被加工物との間の間隙を超える幅を有するパルス化レーザ光を発生して、発生レーザ光の光軸を被加工平面に対して傾斜させて間隙に照射する。パルス化レーザ光は、回転工具の1回転又は整数回転当たり1パルスの発振パルス周期を有し、該発振パルスオン期間の間に回転工具の同一角度範囲に照射する。間隙に照射されて該間隙により遮蔽されずに回折した光を受光センサーにより検出して、間隙長さを測定する。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
画像検査方法および画像検査装置
【課題】所定の繰り返しピッチで連続して生産される部品の画像検査において,その画像検査の実施状態を知ることが可能となる技術を提供する。
【解決手段】画像検査装置10において,マッチング処理部141は,入力された検査画像のフレームから部品を検出し,検出された部品の位置と相関値とを取得する。フレーム間部品対応検出部151は,連続する2つのフレーム間で類似する部品の対応を検出する。対応部品位置差分算出部152は,対応部品間の検出位置の差分である対応部品位置差分を算出する。対応部品位置差分統計部153は,対応部品位置差分を統計した移動量ヒストグラムを作成する。部品移動量推定部155は,移動量ヒストグラムから連続するフレーム間での部品の移動量を推定する。画像検査実施状態判定部150は,部品の移動量の推定結果から,画像検査が適切に実施されているか否かを判定する。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】
従来技術によれば、試料に熱ダメージを与えることなく、短時間で高精度に欠陥検出・寸法算出することが困難であった。
【解決手段】
試料の表面におけるある一方向について照明強度分布が実質的に均一な照明光を、前記試料の表面に照射し、前記試料の表面からの散乱光のうち互いに異なる複数の方向に出射する複数の散乱光成分を検出して対応する複数の散乱光検出信号を得、前記複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の存在を判定し、前記処理により欠陥と判定された箇所各々について対応する複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の寸法を判定し、前記欠陥と判定された箇所各々について前記試料表面上における位置及び欠陥寸法を表示する欠陥検査方法を提案する。
(もっと読む)
車両寸法検出システム
【課題】車両通過帯を通過する車両の寸法を検出すること。
【解決手段】車両通過帯170の側方に設けられて、当該車両通過帯170を通過する車両190を映す鏡130と、車両通過帯170の上方に設けられて、当該車両通過帯170を通過する車両190と、鏡130に映った当該車両190の鏡像とを撮像する撮像装置150と、撮像装置150と電気的に接続されて、撮像装置150が撮像した画像における、車両190の実像の輪郭線上の特徴的な複数の実像点と、鏡130に映った当該車両190の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両190の寸法を演算により求める演算装置110とを備える。
(もっと読む)
パターン検査装置、パターン検査方法、およびパターンを有する構造体
【課題】検査感度を向上させることができるパターン検査装置を提供する。
【解決手段】第1の検出データと前記第1の遅延データとから解像限界以下のパターンのデータを抽出する第1の抽出部33と、前記抽出された第1の検出データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の検出データに係るデータの出力レベルと前記平均値との差を演算する第1の出力変位演算部34aと、前記抽出された第1の遅延データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の遅延データに係るデータの出力レベルと前記平均値との差を演算する第2の出力変位演算部34bと、前記第1及び第2の出力変位演算部による演算結果に基づいて、パターン欠陥を検出する。
(もっと読む)
車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム
【課題】料金所内に前後車両が接近して入ってきたとき、前後車両の撮像画像から通信可否を判定する。
【解決手段】前方車両の前部画像を撮影する車両撮影手段11と、撮影された画像などから車両を検出する車両検出手段21と、撮影された前方車両の前部画像に映るフロントガラス底辺の画像位置に基づき前記無線受信器から前記前方車両のフロントガラス底辺までの水平距離の他、フレームレートとガラス底辺画像の変化から速度を求める距離演算手段22と、前方車両の車両サイズ(車両長さ,後部高さ)を取得する車両サイズ取得手段23と、前方車両の速度と水平距離+車両長さとを用いて、前後車両の車間距離を推定し、後続車両でのDSRC通信による料金収受データの受信不可(隠れ)を判定する隠れ発生有無判定手段24とを備えた車両間隔検出システムである。
(もっと読む)
フェイスモーショントラッキング方法
【課題】1台のカメラによってオペレーターの顔の向きや口の動きを容易に検出することができる光学式フェイスモーショントラッキング方法を提供する。
【解決手段】オペレーター3に装着された顔面装着型表示装置1の額部の複数光学マーカーAi、Bjと、下唇部の複数光学マーカーCkに対し、1台のカメラ2と、コンピューター5により構成される顔角度演算部6、口開口度演算部7からなる画像処理部4を備えた構成により提供される。額部の光学マーカーAiは水平方向に湾曲するように少なくとも3個以上、垂直方向の光学マーカーBjは少なくとも1個以上配置し、かつ、下唇光学マーカーCkは少なくとも1個以上を配置し、カメラ2によって撮影され、光学マーカーAi、Bj、Ckの位置を検出する。このように構成することにより、1台のカメラによって簡便にオペレーター3の顔の3次元角度を算出することができる。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
表面検査方法および表面検査装置
【課題】繰り返しパターンの線幅を測定可能であるとともに、繰り返しパターンの下層部の状態を検出可能な表面検査方法および装置を提供する。
【解決手段】所定の繰り返しパターンを有するウェハの表面に直線偏光を照射する照射ステップ(S104)と、直線偏光が照射されたウェハの表面からの反射光を受光する受光ステップ(S105)と、対物レンズの瞳面と共役な面において、反射光のうち直線偏光の偏光方向と垂直な偏光成分を検出する検出ステップ(S106)と、検出した偏光成分の階調値から繰り返しパターンの線幅および繰り返しパターンの下層部の状態を求める演算ステップ(S107)とを有し、演算ステップでは、瞳面において線幅との相関が高い線幅感応瞳内位置での階調値から線幅を求めるとともに、線幅変化の影響を受けない線幅不感応瞳内位置での階調値から繰り返しパターンの下層部の状態を求める。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
101 - 120 / 823
[ Back to top ]