
Fターム[2F065AA22]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 1方向の (823)
Fターム[2F065AA22]に分類される特許
21 - 40 / 823
ホースクリップ組付け状態検査方法
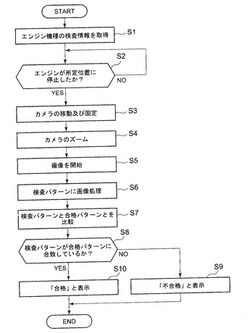
【課題】ホースクリップが周方向の所定位置に組付けられているかどうかを容易に管理することが可能なホースクリップ組付け状態検査方法を提供する。
【解決手段】ゴムホース及びこのゴムホースに組み付けられたホースクリップをカメラで撮像する工程と、これらのゴムホース及びホースクリップの画像を検査パターンに画像処理する工程と、この検査パターンを、予めホースクリップの合格パターンとして記憶されたホースクリップの所定周方向組付け位置のパターンと比較する工程と、ホースクリップの周方向組付け位置の合否を判定する工程と、を備える。
(もっと読む)
円筒部材の検査法および検査装置

【課題】被検査対象物であるワークに対して加工したり、他の部位を装着したりすることなく、ワーク全周の疵を安定して検出することが可能な検査方法および検査装置を提供する。
【解決手段】ワークWの円筒面を検査部4にて検査するための検査装置および検査方法である。回転軸心L1,L2が相互に平行に配設されている一対の回転軸11,12にてワークを支持させた状態で、回転体11,12をワークに接触させる。一対の回転軸11,12を回転駆動させることにより、回転体31をワークとともに回転させる。回転軸11,12とワークWとの間に滑りが生じることなくワークWがその軸心廻りに1回転する基準時間での回転体31の回転状態を検出する。回転状態に基づいてワークWと回転軸11,12との間に滑りがあるか否かを判断しつつ、ワークWの画像を撮像する。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】ラインセンサ画像中のトロリ線とトロリ線以外の物体とを切り分け、トロリ線摩耗面の誤検出を低減することを可能とした画像処理によるトロリ線摩耗測定装置を提供する。
【解決手段】車両の内部に設置された処理用コンピュータが、車両の屋根上に設置されてトロリ線を撮影するラインセンサカメラ2から入力される画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、入力された画像に対してGSTH処理を行ってGSTH画像を作成するGSTH処理部4bと、入力された画像に対して二値化処理を行って二値化画像を作成する二値化処理部4cと、入力された画像に対してトロリ線の摩耗部分の両側のエッジを検出するトロリ線摩耗部エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の摩耗量を検出するトロリ線摩耗部幅計算部4eとを備える構成とした。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
幅測定装置
【課題】安価でかつ信頼性の高い幅測定機能を有し、被測定物体の幅を高精度に測定することができる幅測定装置を提供する。
【解決手段】被測定物体1の上方より外側に配置され、その一方側にスリット状光を照射する光源2aと、そのスリット状光を撮像する一方側2次元撮像部4aと、被測定物体1の一端部28aの幅方向座標を演算する一端部幅方向座標演算部7aと、一端部高さ方向座標演算部8aと、一端部位置演算部9aと、被測定物体1の上方より外側でかつ光源2aと反対側に配置され、その他方側にスリット状光を照射する光源2bと、そのスリット状光を撮像する他方側2次元撮像部4bと、他端部28bの幅方向座標を演算する他端部幅方向座標演算部7bと、他端部高さ方向座標演算部8bと、他端部位置演算部9bと、一端部28aおよび他端部28bの空間位置に基づいて、被測定物体1の幅を演算する幅演算部10と、を備える。
(もっと読む)
走行体の停止位置検出方法、及び走行体の停止位置検出装置
【課題】走行体の前面を斜めから撮像した場合であっても、走行体の先端部位置と基準停止位置とのズレ距離量を正確に求めることができ、走行体が基準停止位置に正確に停止しているか否かを確実に判定する。
【解決手段】走行体3の停止位置検出方法は、撮像手段により、走行体3が停止する位置として予め設定された基準停止位置PSと、この基準停止位置PSに対し上下方向又は左右方向にずれた場所に存在する走行体3の端部位置PFとが同時に写り込んだ撮像画像Fを取得するステップと、取得した撮像画像Fから、基準停止位置PSと走行体3の端部位置PFとの実空間における水平方向のズレ距離量を算出するステップと、得られたズレ距離量を基に、走行体3が基準停止位置PSに停止したか否かを判定するステップと、を有する。
(もっと読む)
温度計測装置、基板処理装置及び温度計測方法
【課題】光干渉を利用して測定対象物の温度を適切に計測することができる温度計測装置、基板処理装置、及び温度計測方法を提供する。
【解決手段】温度計測装置1は、データ入力部16と、ピーク間隔算出部17と、光路長算出部20と、温度算出部21とを備える。データ入力部16は、測定対象物13の表面13aへ測定光が照射され、表面13aにおいて反射された測定光と裏面13bにおいて反射された測定光とが干渉して得られる干渉光のスペクトルを入力する。ピーク間隔算出部17は、入力されたスペクトルのピーク間隔を算出する。光路長算出部20は、ピーク間隔に基づいて光路長を算出する。温度算出部21は、光路長に基づいて、測定対象物13の温度を算出する。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
サイズ判定機構、及び、当該サイズ判定機構を用いる移動体処理装置
【課題】部品点数を低減するとともに、単純な構成の導光体を利用可能にする。
【解決手段】搬送中の移動体を検知する移動体検知部D1,D2を有し、移動体検知部は、搬送路5に臨む発光部S1,S3と、搬送路に臨む受光部S2,S4と、搬送路を介して発光部及び受光部に対向しており、発光部が放射した光を受光部に導く導光体P1,P2とによって構成されており、かつ、発光部及び受光部が移動体のサイズを区分するために予め設定された仮想上の境界線の両側に配置されるように、境界線の上に、境界線に対して傾斜して配置されている。
(もっと読む)
寸法測定装置
【課題】凹凸パターンの上部及び下部の寸法を明確に区別して測定する。
【解決手段】基板5上に形成された凹凸パターンを拡大観察する顕微鏡1と、前記顕微鏡1を通して観察される前記凹凸パターンを撮像する撮像カメラ2と、前記顕微鏡1の対物レンズ7の視野外からその視野内に散乱光を照射する照明光学系3と、前記撮像カメラ2の画像を入力して表示部17の画面17a上に表示し、入力手段16により入力して前記表示画面17a上に指定された範囲内の前記凹凸パターンの上部及び下部のいずれか一方、又は両方の寸法を測定する制御手段4と、を備えたものである。
(もっと読む)
長尺材の測長方法及び装置
【課題】エンコーダの機械的不具合による測長異常をその場で検出し、大量の長さ不適合の発生を防止する。
【解決手段】透光する目盛2を付した定規1をラックレール12沿いに架設し、且つ定規1の目盛位置を測定する目盛位置測定器3を鋼管20長さ方向の一端側と他端側の各台車22に搭載しておき、一端側と他端側とでそれぞれ、台車22の移動の間、目盛位置測定器3による測定値とエンコーダによる測定値とを逐次比較し、両者の差が閾値超となったことを測長異常と同定する。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラム
【課題】カメラで撮像された目視点検映像からBEC穴の隙間の閉塞率の検査を自動で行うことができる原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラムを提供する。
【解決手段】蒸気発生器内の管支持板のBEC穴の閉塞状況を検査する原子力発電プラントの蒸気発生器検査装置であって、管支持板のBEC穴の開口形状を撮像する撮像手段と、撮像したBEC穴の画像を記録し、画像から開口形状を示す目視点検画像を抽出して記憶する記憶部と、目視点検画像に対し、3次元形状モデルのデータから生成した基準画像、又は予め記憶部に記憶している基準画像の初期BEC穴の開口形状を重ね合わせる処理をした後、重ね合わせた初期BEC穴の開口形状と目視点検画像の開口形状とからBEC穴の閉塞率を算出する画像処理部と、を有する。
(もっと読む)
開口建具の設置スペースのサイズを求める方法
【課題】人的コストを節約可能であり、測定の利便性を向上可能な開口建具の設置スペースのサイズを求める方法を提供する。
【解決手段】開口建具、すなわちドア又は窓の設置スペースのサイズを求める方法は、少なくとも1つの辺縁を有するドア(窓)設置スペースを提供するステップ(a)と、ドア(窓)設置スペースの一辺に寸法校正部材を設置するステップ(b)と、影像キャプチャ装置を利用し、ドア(窓)設置スペースおよび寸法校正部材を含む影像を取得するステップ(c)と、影像を影像測定システムへ伝送するステップ(d)と、影像測定システムを利用して影像を分析し、ドア(窓)設置スペースと寸法校正部材との比例関係を取り、影像の比例関係と寸法校正部材の実際の寸法とに基づき、ドア(窓)設置スペースの実際の寸法を算出するステップ(e)と、を含む。これにより、人的コストを節約可能であり、測定の利便性を向上可能である。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の摩耗量や偏位量を正確に測定する。
【解決手段】架線検測車屋根上にトロリ線へ投光する光を照射する投光ユニットを設け、トロリ線より反射した光を受光する受光ユニットを設ける。受光ユニットより受光した信号を二値化回路によってある閾値で二値化し、エッジ検出回路でパルス波形の立ち下がりから次の立ち上がりまでの距離に基づいて、剛体やイヤーなどのノイズ信号とトロリ線の信号を判別し、トロリ線摺面の検出信号を得る。エッジ検出回路から得られた検出信号は、演算装置によって前回の偏位データと今回の偏位データが比較され、前回のものと最も近い信号をトロリ線データとして検出し、トロリ線摩耗量(残存直径)に変換される。これによって、ノイズによる誤検出を低減させ、トロリ線の外形を正確に求める。
(もっと読む)
レジストの光学特性を変化させる方法及び装置
【課題】集積回路のような電子素子の製造において、光計測を用いた測定の精度を改善する方法及びシステムを提供する。また、調節可能なレジストの光学特性を変化させる方法及びシステムを提供する。
【解決手段】その調節可能なレジスト層は反応性ガス、液体、プラズマ、放射線若しくは熱エネルギー又はこれらを結合させたものを用いて処理されて良い。それによってフォトレジストは露光前に第1組の光学特性と異なる第2組の光学特性を得て、露光波長で又はその近傍の放射線に対して透明ではなくなり、OTSM構造420が光線425、426及び427を反射する。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
21 - 40 / 823
[ Back to top ]