
Fターム[2F065AA31]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368)
Fターム[2F065AA31]の下位に属するFターム
2直線のなす角度 (102)
2平面のなす角度 (40)
交点、交線を延長によって求めるもの (4)
面の方向;面法線の方向 (294)
テーパ角 (16)
物体の姿勢 (755)
回転角 (292)
Fターム[2F065AA31]に分類される特許
101 - 120 / 865
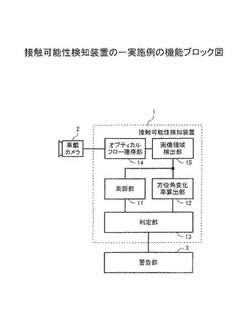
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
基板検査方法

【課題】複数の投影部を通して測定対象物が形成された基板を検査する基板検査方法を提供する。
【解決手段】複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得する(S110)。以後、投影部別位相データを用いて基板に対する投影部別高さデータを抽出する(S120)。その後、各投影部別で投影部別高さデータを用いて抽出された高さデータの傾きを補正する(S130)。その後、傾き補正が完了した投影部別高さデータを整列させ(S140)、整列された高さデータを用いて統合高さデータを抽出する(S150)。このように、複数の投影部から抽出された高さデータを整列させる前に各投影部別に測定された高さデータに対する傾きを補正することによって、統合高さデータの信頼性を向上させることができる。
(もっと読む)
画像処理装置および距離計測装置
【課題】撮影シーンに応じた立体表示を実現することが可能な技術を提供する。
【解決手段】画像処理装置は、撮影領域における被写体までの距離計測を、撮影領域に設定された予備計測位置において行って、距離情報を取得する第1距離計測部12と、第1距離計測部12で取得された距離情報に基づいて、撮影領域における被写体までの距離計測を追加して行うための本計測位置を撮影領域において設定する設定手段と、本計測位置において距離計測を行って、距離情報を取得する第2距離計測部13と、第1距離計測部12および第2距離計測部13で取得された距離情報に基づいて、視差情報を生成する視差情報生成部15と、視差情報に基づいて立体画像を生成する立体画像生成部16とを備える。
(もっと読む)
有水式ガスホルダの傾斜測定方法及び装置
【課題】多段のガス槽の傾斜状態をリアルタイムで計測することができ、各ガス槽の支持部材の更新時期を的確に判断することできる有水式ガスホルダの傾斜測定装置を提供する。
【解決手段】水槽2内の水面から上昇しているガス槽を特定するガス槽特定手段27と、特定したガス槽に配置されている反射板21a〜23aに光軸が一致するように第1〜第3光波距離計25a〜25cを移動させる第1〜第3駆動部26a〜26cと、第1〜第3光波距離計が測定した反射板との距離に基づいて、特定したガス槽の傾斜情報を算出する算出手段28と、その傾斜情報を表示する表示手段29とを備えている。
(もっと読む)
位置変化判定装置、位置測定装置、位置変化判定方法及びコンピュータプログラム
【課題】センサの設置位置又は向きの変化に関して生じる労力を軽減すること。
【解決手段】設置位置又は設置の向きの変化に応じて測定結果が変化するセンサに対して取り付けられる位置変化判定装置であって、周囲の光を受光することによって、周囲の情報を取得する取得部と、前記センサが所定の位置及び所定の向きに設置された時点で前記取得部が取得した情報を初期情報として記憶する初期情報記憶部と、前記取得部によって取得された現在の情報と、前記初期情報記憶部に記憶される前記初期情報とを比較して、前記センサの現在の位置又は向きが前記所定の位置及び所定の向きから変化したか否か判定する位置変化判定部と、を備える。
(もっと読む)
位置変動監視装置およびこれを含む位置変動監視システム
【課題】監視対象領域の位置変動の測定精度を高める。
【解決手段】位置変動監視システム1は、予め決められた監視対象領域に設置された複数の監視指標2と、複数の監視指標2が撮像された撮像画像を用いて監視対象領域の位置変動を検出する位置変動監視装置3とを備える。位置変動監視装置3は、複数の監視指標2を予め設定された時間間隔で撮像する撮像部51と、撮像部51により時系列で得られる撮像画像を用いて複数の監視指標2の位置変位を求める画像解析部61と、複数の監視指標2の位置変位があった場合に警告を報知するように報知装置4を制御する報知制御部63とを備える。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離情報と測定点毎の受光量情報とを取得する光学式距離測定部と、受光量情報において、光量が閾値を超える複数の測定点の並びが所定のパターンを形成している場合に、これらの測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、判定された測定点の距離に基づいて、対象物の位置を測定する位置測定部と、対象判定ステップによって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、同一の対象物のローカル座標系における位置及びグローバル座標系における位置に基づいて較正を行う較正部とを備える。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
車輪形状計測装置、車輪形状計測方法、車輪形状計測プログラム
【課題】車輪の径中心を求める必要も、カメラの焦点も変える必要がなく、簡単に光切断法による車輪の形状計測を実行できる車輪形状計測装置等を提供する。
【解決手段】レールに対し所定の高さに設置され、通過センサ11a〜12bによって車輪10aが通過したことが検出された場合、車輪10a,10bの計測部位に向け水平方向にレーザ線条光を照射するレーザ線条光照射部13aと、車輪10a,10bの通過が検出された場合、レーザ線条光が照射された車輪10a,10bの照射部位を撮影するカメラ15a,17aと、それらのカメラ15a,17aが撮影した車輪10a,10bの照射部位の画像を画像処理して、水平方向にレーザ線条光を照射したことに基づく歪を補正する画像処理部18と、歪補正された画像に基づいて車輪10a,10bの形状に関する所定の計測項目を計測する車輪形状計測部19とを有する。
(もっと読む)
形状測定装置、形状測定制御プログラム及び形状測定方法
【課題】テーブル等の移動に伴う誤差を排除することができ、被測定物の形状を高精度に測定可能な手段を提供する。
【解決手段】形状測定装置LMSは、被測定物Wと第1、第2プローブ光とを相体移動させるワーク移動ユニット10及びミラーユニット30と、被測定物Wの測定面に照射位置が所定間隔離れた第1,第2プローブ光を照射するとともに、反射光の位置に応じた第1,第2受光信号を出力する光学入ニット20と、これらの作動を制御する制御ユニット50とを備える。制御ユニット50は、測定面の測定部位を測定ラインに沿って前記所定間隔と同程度離間した位置に順次移動させ、各測定部位ごとに第1、第2プローブ光の照射位置の傾斜角度を算出させ、算出された複数の測定部位の傾斜角度情報に基づいて測定ラインに沿った測定面の形状を導出するように構成される。
(もっと読む)
形状測定装置
【課題】光学式のセンサー部によって測定する、被検物の形状測定の測定精度を向上させる。
【解決手段】被検物にライン光を照射する光照射部(91)およびライン光の照射方向とは異なる方向から被検物に照射されたライン光を検出する検出部(92)を有するセンサー部(20)と、互いに直交する座標系の座標軸方向それぞれに、センサー部(20)を移動させる移動部と、移動部に対してセンサー部(20)を回転可能に支持する回転機構と、座標系の基準位置を示す球を検出することにより、移動部に対するセンサー部(20)の回転方向を算出する回転方向算出部(359)と、を備える。
(もっと読む)
レーザ光の光軸方向の測定方法、長さ測定システム、および位置決め精度の検査方法
【課題】ターゲットの位置決め範囲が従来より狭く、かつ、測定光の光軸が固定されたレーザ干渉計であっても、測定光の光軸方向を測定可能な方法を提供すること。
【解決手段】レーザ干渉計104と再帰反射体106とハンドリング装置102を有する測定システム100を用いる。レーザ干渉計104は、測定光を再帰反射体106に照射し、その反射光と参照光との干渉光強度を検出する。ハンドリング装置102は、再帰反射体106を測定位置まで移動して位置座標情報を検出する。まず、レーザ干渉計104が干渉光を検出でき、かつ同一平面上に存在しない少なくとも4つの測定位置piを選ぶ。再帰反射体106を各測定位置piに移動させて、その位置座標情報を検出する。レーザ干渉計104が再帰反射体106までの距離の変化量を測定する。各測定位置の位置座標情報と各距離の変化量に基づき測定光のベクトル情報 a を算出する。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
姿勢制御装置、制御方法及びプログラム
【課題】検査対象と撮像装置との相対的な位置関係である視点位置が基準視点位置と同じになるように、撮像装置の姿勢を制御する。
【解決手段】特徴線抽出部105は、撮像装置が所定の姿勢で検査対象を撮像した画像データから検査対象の特徴線を抽出する。次に、移動量算出部109は、当該特徴線の位置と基準特徴線の位置とに基づいて、現在の視点位置から基準視点位置までの移動量を算出する。そして、反映部110は、当該移動量を姿勢制御情報に反映させる。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
位置合わせ装置、位置合わせシステム及び位置合わせプログラム
【課題】対象物の撮影画像から抽出される形状に基づいて、対象物の撮影画像と当該対象物の設計情報とを位置合わせする位置合わせ装置、位置合わせシステム及び位置合わせプログラムを提供する。
【解決手段】位置合わせ装置1は、対象物3を撮影した撮影画像情報111から当該対象物3に設けられた孔を選択する特徴点選択受付手段101と、特徴点選択受付手段101が選択を受け付けた孔の特徴点を抽出する特徴点抽出手段102と、対象物3の見本となる対象物三次元情報113から特徴点に対応する対応点を選択する対応点選択手段103と、対応点を座標変換し、撮影画像の視点と特徴点とを通る直線と、対応点との距離を最小にして、対象物3の撮影画像情報111と対象物3の見本となる対象物三次元情報113とを位置合わせする位置合わせ手段104とを有する。
(もっと読む)
調整方法
【課題】簡単な構成で容易に撮像面の傾斜状態を検出可能な傾斜検出方法を提供する。
【解決手段】2つの撮像装置のそれぞれについて、撮像装置の傾斜状態を検出する傾斜検出工程と、撮像装置の傾斜を調整する傾斜調整工程と、撮像装置の位置を検出する位置検出工程と、撮像装置の位置を調整する位置調整工程と、を有し、傾斜検出工程は、均等間隔で設けられたパターンを、撮像装置の焦点位置を順次変化させて撮像し、撮像画像におけるパターン位置を検出してパターン領域を設定し、パターン領域における各画素の輝度値を検出し、検査方向に沿って画素間の輝度変化量を算出し、各パターン領域における輝度変化量の積算値を算出し、積算値が最大となる撮像画像に対応した焦点一致位置を検出し、焦点一致位置に基づいて、撮像装置の傾斜状態を検出することを特徴とする調整方法。
(もっと読む)
欠陥寸法測定装置、欠陥寸法測定方法、及びプログラム
【課題】撮像装置の光軸方向に対して高低差がある検査対象の欠陥の寸法を正確に測定する。
【解決手段】平面座標取得部302は、画像データに含まれる検査対象の欠陥を示す画素の平面座標を取得する。空間座標変換部305は、平面座標取得部302が取得した平面座標を、仮想空間に配置された検査対象の外観を表す3次元モデルの表面と平面座標が示す点に対応する仮想空間上の直線との交点を示す空間座標に変換する。仮想寸法算出部307は、空間座標変換部305が変換した複数の空間座標を用いて仮想空間における前記欠陥の寸法を算出する。
(もっと読む)
101 - 120 / 865
[ Back to top ]