
Fターム[2F065AA31]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368)
Fターム[2F065AA31]の下位に属するFターム
2直線のなす角度 (102)
2平面のなす角度 (40)
交点、交線を延長によって求めるもの (4)
面の方向;面法線の方向 (294)
テーパ角 (16)
物体の姿勢 (755)
回転角 (292)
Fターム[2F065AA31]に分類される特許
161 - 180 / 865
クロスマーク検出装置及び方法、並びにプログラム
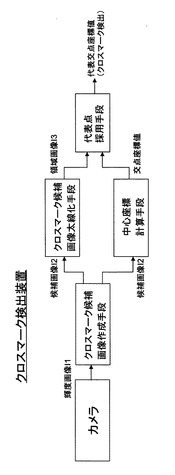
【課題】テンプレートに頼らず、各画素の周囲の輝度の変化を検出することで、安定したクロスマークの検出を行う。
【解決手段】クロスマーク検出装置は、画像中の各点についてクロスマークの中心を判定して、クロスマーク候補点画像とするクロスマーク候補画像作成手段と、クロスマーク候補画像を太線化し、領域分割して近傍にあるクロスマーク候補点に同じ領域番号を付与した領域画像を出力するクロスマーク候補画像太線化手段と、クロスマーク候補点に対して近傍の輝度情報を使って二直線の交点としてクロスマーク中心座標を計算するクロスマーク中心座標計算手段と、同一の領域番号を持つ点の中で最大のスコアを持つ点を領域の代表点としてクロスマークの中心であると判定する代表点採用手段とから成る。
(もっと読む)
孔傾斜計測治具及び孔傾斜計測方法

【課題】計測対象孔の傾斜状態を計測する場合に、計測対象孔の加工作業の効率低下を防止すると共に、計測対象孔の細径化にも対応することが可能な孔傾斜計測治具を提供する。
【解決手段】孔傾斜計測治具の構成として、平面に形成された計測対象孔に挿入自在な棒状部材と、該棒状部材の中心軸線に直交するように当該棒状部材に設けられた直交部材と、該直交部材において前記中心軸線から離間した位置に設けられた光反射部材とを具備するという構成を採用する。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
カメラ姿勢パラメータ推定装置
【課題】広角カメラの姿勢パラメータを容易にかつ正確に推定する技術を実現する。
【解決手段】カメラ姿勢パラメータ推定装置は、半球以上の視野を有する広角カメラにより得られる広角画像から、実空間における、相互に平行な少なくとも2つの第1直線及び第2直線と、第1直線及び第2直線と垂直な関係を有する1つの第3直線とから構成される特定パターンを形成し得る各線分をそれぞれ取得するパターン取得手段と、このパターン取得手段により取得された特定パターンを形成し得る各線分を用いて上記広角画像に対する2組の消失点ペアを決定する決定手段と、この決定手段で決定された2組の消失点ペアを用いて地面に対する広角カメラの姿勢パラメータを推定する推定手段と、を備える。
(もっと読む)
方向検出装置
【課題】移動体の進行方向を、簡易な構成で検出する方向検出装置を提供する。
【解決手段】投光部2を間に挟んで受光部3,4を配置して、受光部3,4が移動体10の有無を示すON/OFF出力を行う。方向判定部6が、受光部3,4のON/OFF出力の経時変化に基づいて、移動体10の進行方向が受光部3から受光部4の方向か、又は受光部4から受光部3の方向かを1次元で検出する。
(もっと読む)
車載カメラ校正システム及びコンピュータプログラム
【課題】特定の路面標示や、予め記憶した路面標示の特徴量を必要とすることなくカメラの校正を行える「車載カメラ校正システム及びコンピュータプログラム」を提供する。
【解決手段】カメラ1で撮影した二つ画像フレームから特徴点を抽出し、同じ地点を表す特徴点のペアにペアリングする。画像フレーム上の座標と、当該画像フレーム上の座標に写り込む地点の前記自動車に固定された世界座標系上の座標との、カメラ姿勢を変数として用いた関係式に従って、前記ペアにペアリングされた二つの特徴点の前記画像フレーム上の座標を用いて示される、当該ペアにペアリングされた二つの特徴点が表す地点の世界座標系上の移動量と、自動車の車速から算出した当該自動車の移動量Dyに対する誤差の、各ペアについての総和が最小となるように、カメラの姿勢を算出する。
(もっと読む)
組付受部品の認識構造及びこれを用いた組立情報認識装置並びに組立処理装置
【課題】組付受部品の位置及び姿勢からなる配置情報を容易且つ正確に認識する。
【解決手段】予め決められた部位に組付部品3を組み付けるための組付受部品2が配置された組立基台1の一部に設けられ、この組立基台1の位置及び姿勢からなる配置情報を認識する基準となる認識基準面11と、この認識基準面11に対し撮像具5にて撮像可能に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、を備える。組付受部品2に認識基準面11と認識表示体12とを備えてもよい。更に、組立情報認識装置や、組立処理装置をも対象とする。
(もっと読む)
姿勢検出装置
【課題】
簡易に、かつ、精度良く被検体の姿勢を検出する。
【解決手段】
頭部に装着された個別光発生部121Aj(j=1,2,3)のそれぞれが、波長λjのビーム光を射出している間、処理部は、第1光検出部130A及び第2光検出部140Aの両方の検出部からのビーム光の到達検出結果を得るため、透過設定指令及び不透過設定指令を第1光検出部130Aへ送る。第1及び第2光検出部130A,140Aは、個別光発生部121Ajのそれぞれから射出された光の到達を検出すると、検出結果を処理部へ送る。そして、処理部は、第1及び第2光検出部130A,140Aのそれぞれにおいて、いずれの個別光検出部が波長λjの光を検出したかに基づき、頭部の位置及び姿勢を特定する。
(もっと読む)
車高検出装置
【課題】専用の車高センサを設けることなく、簡易な構成で車高検出装置を提供する。
【解決手段】車高を検出する車高検出装置10において、車体に固定され、車両周辺の測定対象物までの水平距離Aを測定するソナー40と、車体に固定され、車両周辺の測定対象物を撮像するカメラ30と、撮像された測定対象物の所定部の画像データ,水平距離A,及びソナー40とカメラ30との位置関係データ(B,β)に基づいて、測定対象物の所定部に対するカメラ30の地上高Hを算出し、この地上高Hから車高を算出するECU20と、を備えた。
(もっと読む)
低密度の反射対応から鏡面物体の表面を再構築するための方法
【課題】低密度の反射対応から鏡面を再構築する。
【解決手段】点対応手順が鏡面物体203の画像のセットに適用され、低密度の反射対応が生成される(210)。画像のセットは、カメラ202によって取得される間、回転を受ける。すなわち、カメラ202、環境、又は物体203のいずれかが回転する。線形系AΘ=0が解かれる(220)か、又は関連する二次錐計画(SOCP)が解かれる。ここで、Θは局所表面パラメーターのベクトルである。表面の勾配は局所二次曲面パラメーターから得られ(230)、勾配は法線を得るために統合される(240)。ここで法線は表面の形状を定義する。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
袋入り製品の位置検出方法及びその装置
【課題】袋入り製品の袋歪みに影響されずにケース内の袋入り製品を認識して、その位置を短時間で検出することが可能な袋入り製品の位置検出方法及びその装置を提供する。
【解決手段】袋入り製品の位置検出装置10は、表面に模様が記載された収納袋に物品を封入した袋入り製品の群から抽出した複数のサンプルの表面に現れる模様のサンプル画像12の輝度分布特徴を求める学習手段13と、袋入り製品がケース内に並べられた状態を撮影したカメラ画像15から切出した複数の分割画像16の中から、輝度分布特徴に似た類似輝度分割画像を求め、類似輝度分割画像のカメラ画像15内での位置に基づいて袋入り製品のケース内での製品位置を求める認識手段17とを有する。
(もっと読む)
たわみ計測装置、ならびにたわみおよび軸ねじれ計測装置
【課題】簡単かつ安価に回転軸体の軸線方向に直角な方向のたわみ量や軸ねじれを非接触にて測定できる計測装置を提供する。
【解決手段】被計測物である回転軸体10の外周面に設けられてその回転とともに回転運動するターゲット体11a、11bによって前記回転軸体10の軸線方向に略平行に照射される発光部3からの光線の光路を周期的に横切らせ、当該ターゲット体11a、11bにより遮光されない光線または反射光を受光・演算表示部4で受光するようにしておき、前記回転軸体10のたわみ変形に起因する前記ターゲット体11a、11bの被照射面における前記光線の照射位置の変化を検出し、当該検出結果に基づいて前記回転軸体10のたわみ量を計測するようにした。
(もっと読む)
海底ケーブル位置把握支援システム
【課題】海底ケーブルの布設状況を容易に把握させること。
【解決手段】海底に布設されたケーブルに紐状部材140を介して連結された複数のブイ110と、複数のブイ110のそれぞれと通信可能な海底ケーブル探査装置120と、を備えた海底ケーブル位置把握支援システム100において、複数のブイ110が、レーザー光を浮き状装置の外周方向に向かって全周にわたって送信するレーザー送信部と、外部から送信されたレーザー光を受信するレーザー受信部と、海底ケーブル探査装置120との間で通信をおこない、レーザー受信部によってレーザー光が受信された場合に海底ケーブル探査装置120に対して受信状態通知情報を送信する浮き状装置側通信部と、を備えた。
(もっと読む)
変位/ひずみ計測装置
【課題】計測対象に対する撮像装置の相対的な位置や姿勢を一定に保つことが容易な、あるいは、計測対象に対する相対的な位置や姿勢を容易に調整できる変位/ひずみ計測装置を提供する。
【解決手段】撮像装置2と画像解析装置から構成されて、撮像装置2で計測対象物を撮像した画像を画像解析装置で解析して、当該計測対象物の変位又はひずみを算出する変位/ひずみ計測装置において、撮像装置2に、1個の固定当接部材13と、2個のマイクロメータ14を取り付けて、固定当接部材13とマイクロメータ14のスピンドル14bの先端を計測対象物に当接させる。
(もっと読む)
視軸調整用ターゲットの自動位置調整装置
【課題】 視軸を有するセンサ機器と、センサ機器を搭載する機体の基準軸とを一致させる際に、センサ機器の視軸と機体の基準軸を合わせるためのターゲットを用いるが、このターゲットと機体の基準軸の位置調整を手動で調整していたため、調整の時間と手間がかかっていた。
【解決手段】 機体の基準軸にレーザ光発生装置を取り付け、ターゲットに受光器を設けることで、機体の基準軸の位置とターゲットの基準軸とのずれ量を計算し、自動的に位置調整を行えるようにした。
(もっと読む)
検査装置および検査方法
【課題】光学的な測定を行うための照射部および受光部がそれぞれ最小個数でありながらも、被検査基板の測定対象物の光学的な測定を精度良く行うことが可能な検査装置および検査方法を提供する。
【解決手段】レーザー計測器33はレーザー光を照射する照射部33aと測定対象物111で反射された反射光を受光する受光部33bを有し、シャフト333の下端に取り付けられている。シャフト333にはベルト335を介してモータ331の回転駆動力が伝達されるように構成されており、レーザー計測器33はモータ331の回転により向きを変更可能に構成されている。これによって、測定対象物111から見たレーザー光の入射経路L1と反射光の反射経路L2との入受光関係が調整可能になっている。
(もっと読む)
地物検出システム
【課題】地物の含まれる実平面を高精度に算出し、地物の位置および大きさを正確に検出することができる地物検出システムを得る。
【解決手段】対象とする地物の周辺のカメラ画像が記憶された画像記憶手段と、地物の周辺のレーザ測量データが、点群データとしてカメラ画像と関連づけて記憶された測量データ記憶手段と、画像記憶手段に記憶されたカメラ画像を表示する表示手段と、表示手段に表示されたカメラ画像上の2点を指定する指定手段と、指定手段で指定された2点の中点から所定の距離の範囲内に含まれる点群を測量データ記憶手段から抽出し、抽出した点群から地物の含まれる平面を算出するとともに、指定手段で指定された2点を算出された平面上にマッピングして、地物の位置および大きさを検出する地物検出手段とを備える。
(もっと読む)
部品位置の計測装置及び計測方法
【課題】蒸気タービンの構成部品位置を計測する際に、計測用の冶具の製作や取り付け等の手間が不要であり、構成部品位置を直接計測することで測定精度並びに信頼性の高い計測が可能な部品位置の計測装置及び計測方法を提供する。
【解決手段】レーザ光3を照射するレーザ発振器1と、レーザ発振器1からのレーザ光3の照射方向に沿って走行することが可能な装置本体5と、装置本体5に設けられ、レーザ光3を所望の角度へ屈折して照射する光学部品と、装置本体5に設けられ、光学部品により屈折され照射されたレーザ光3が構成部品により反射されたレーザ反射光の受光量を検出する受光素子8とを備える。
(もっと読む)
シーラー塗布形状監視装置
【課題】複雑なシステムを採用することなく、簡単なシステム構成により、シーラーの塗布品質の管理を正確に行うことができるシーラー塗布形状監視装置を提供する。
【解決手段】ワークWの表面に塗布されたシーラーの塗布品質を判定するシーラー塗布形状監視装置1であって、ワークW及びワークWの表面に塗布されたシーラーZに対してレーザ光Lを照射し、その照射したレーザ光の反射光L´を受光し、その受光した反射光からワークW及びシーラーZの表面輪郭形状を検知する2次元変位センサ3と、2次元変位センサ3が検知した表面輪郭形状を用いて、ワークWの表面に塗布されたシーラーZの高さ及び幅を算出する制御装置10と、制御装置10が推定したシーラーZの高さ及び幅と、所定の基準値とを比較し、ワークWの表面に塗布されたシーラーZの塗布品質の良否を判定する塗布設備制御盤20とを備える。
(もっと読む)
161 - 180 / 865
[ Back to top ]