
Fターム[2F065BB25]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 光学的性状 (975) | 鏡面 (233)
Fターム[2F065BB25]に分類される特許
1 - 20 / 233
弱測定を利用した信号の増幅装置
【課題】微弱信号を増幅可能な増幅装置を提供する。
【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。 (もっと読む)
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
高さ測定装置及び高さ測定方法
【課題】鏡面性を持つ試料の各位置の高さを正確に求めることができる技術を提供する。
【解決手段】撮像部2は、例えば所定のフレームレートで、試料Sの画像である試料画像を撮像する。輝線抽出部は、撮像部2により順次に撮像された試料画像から輝線を抽出し、所定の基準高さ及び基準傾きを示す基準輝線に対する各輝線のずれw(x)を求める。高さ算出部は、w(x)=2L・(d/dx)・d(x)+2sinθ・d(x)に、輝線抽出部により抽出された輝線のずれw(x)を代入することで、基準高さからの試料Sの高さd(x)を順次に算出する。
(もっと読む)
三次元表面検査装置および三次元表面検査方法
【課題】鏡面反射が酷い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の凹みや大きな疵などの三次元的欠陥を検査することが可能な三次元表面検査装置の提供。
【解決手段】計測対象物Xを撮影するカメラ装置3と、曲面状に配設されて計測対象物を覆うフィルタ膜と、フィルタ膜の曲面状に沿って周期的な強度分布を持つ曲面状強度分布のパターン光を投影し、フィルタ膜を介して計測対象物に投影する曲面パターン光投影手段5と、カメラ装置3により撮影された画像に対し、曲面状強度分布を直線状強度分布に変換するデコード処理を行うことで、計測対象物の表面の三次元的欠陥を検出する欠陥検出手段13とを含む。
(もっと読む)
状態検出装置
【課題】被測定対象物のレーザスペックル画像を得る装置において、被測定対象物の材質などに起因するスペックル画像の画質低下を可及的に抑制する。
【解決手段】被測定対象物(20)表面の観察領域(21)に向けてコヒーレント光を投光する投光部(10)と、被測定対象物表面の観察領域で拡散反射した上記コヒーレント光を受光する受光部(30)と、被測定対象物表面から受光部以外の方向に伝播するコヒーレント光を被測定対象物表面の観察領域に戻す反射部(41)と、受光部における受光状態に基づいて被測定対象物の状態を検出する検知部(50)と、を備える。
(もっと読む)
鏡面反射面の形状測定
【課題】鏡面反射面の形状を測定する方法が提供される。
【解決手段】ターゲット面142に配置されたターゲット140の表面144に表示されたパターンを測定面122に配置された鏡面反射面124から反射させる。反射の画像が撮像面154において記録される。撮像面154に対する鏡面反射面124上の複数の点の位置が決定される。反射の画像上の複数のフィーチャ位置とパターン上の複数のフィーチャ位置との間の第1の関係が決定される。複数の点の位置を初期状態として用いて、鏡面反射面の表面プロファイル及び第1の関係を含む第2の関係から鏡面反射面の形状が決定される。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
6軸測定系の原点出し用治具及び原点出し方法並びに固体撮像素子の相対位置調整方法
【課題】 原点出し用治具の設置再現性の問題を解決すると共に、原点出しを簡易にする。
【解決手段】 被測定対象物の煽り、高さ並びに平面位置及び平面回転位置の6軸を同時に検出できる6軸測定装置を用いて、6軸基準位置を設定するための原点出し用治具1であり、治具本体1aの面に、煽りの原点出しのための鏡面加工された第1の加工部2、高さの原点出しのための凹状の第2の加工部3並びに平面位置及び平面回転位置の原点出しのための穴状の第3の加工部4,5を設け、治具本体1aにはこの治具本体原点位置を位置決めするための穴からなる位置決め部6,7を設けてある。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
表面形状測定装置
【課題】表面形状測定装置の配線系統をできるだけ省き、装置の簡素化を図る。
【解決手段】表面形状測定装置10は、測定対象物12の表面に光を照射する光源14と、測定対象物12の表面上の反射点P1からの反射光を第一の反射光と第二の反射光に分離するビームスプリッタ18と、第一の反射光を反射する第一のミラー20と、第二の反射光を反射する第二のミラー22と、を備えている。さらに、第一のミラー20から反射した第一の反射光及び第二のミラー20から反射した第二の反射光を受光する撮像面30を備える撮像器24を備えている。この撮像器24は、ビームスプリッタ18から第一のミラー20を経由して撮像面30まで到る光路長とビームスプリッタ18から第二のミラー22を経由して撮像面30まで到る光路長とが異なるように配置されている。
(もっと読む)
表面性状測定装置および表面性状総合評価方法
【課題】鏡面に近い面の表面性状を、それぞれの製品あるいは業界に特有の感性に近い指標に基いて定量的且つ総合的に評価できるようにする。
【解決手段】コンピュータ制御にてディスプレイ11に表示したチェックパターンを被測定面21に投影して、反射像を撮影装置12により撮影し、その画像データを収得してコンピュータ3でデータ処理するよう構成した鏡面計1を使用し、コンピュータ3に、鏡面度、鏡面度バラツキ、光沢度、シャープネス、うねり又は形状誤差、コントラストおよび白濁度といった複数の測定項目の算出ロジックを含むコンピュータソフト5を組み込んで、それら複数の測定項目を順次自動的に測定し、鏡面度を含む複数の測定項目を指標として表面性状を評価できるようにする。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
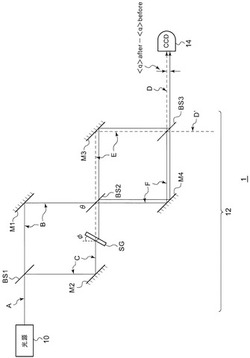
分光特性測定装置、その制御方法、及び分光特性測定方法、並びに分光特性測定装置の光路長差伸縮機構
【課題】外乱による信頼性の低下を抑えた分光特性測定装置とその制御方法、分光特性測定方法、及び光路長差伸縮機構を提供する。
【解決手段】本発明は、被測定物の測定点から多様な方向に向かって発せられた光を一つにまとめた後、分割光学系によって第1反射部と第2反射部に導き、前記第1反射部と前記第2反射部の相対位置に影響を及ぼす外乱を推定し、該外乱を解消するように前記第1反射部と前記第2反射部の少なくとも一方を移動させることにより前記第1反射部によって反射された第1反射光と前記第2反射部によって反射された第2反射光の光路長差を伸縮させつつ、前記第1反射光と前記第2反射光を結像光学系によって同一点に導き、その点の干渉光強度変化に基づき前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する。
(もっと読む)
小型位相シフト装置
【課題】安価で小型の位相シフト機構を提供すること。
【解決手段】従来の位相シフト機構でよく知られている、フィードバック制御機能付きピエゾステージの代わりに、(1)参照光を位相シフトする鏡にトリガ光を反射させ、(2)参照光よりもトリガ光が数倍多く位相シフトするように参照光とトリガ光の入射角を変え、(3)トリガ光で得られる干渉縞を検出する光センサーによってカメラのトリガ信号を作ることで、従来のフィードバック制御機能付きピエゾステージを使用することなく、安価・小型の位相シフト機構を提供することができる。
(もっと読む)
部分計測を合成する形状計測方法
【課題】被検面の形状を高精度に計測すること。
【解決手段】部分計測を複数回行い、それらを合成して全体の形状を得るスティッチ計測方法において、全体計測領域に対して、部分計測領域を複数配置するラティス構築ステップと、ラティスにおいて、全体計測領域の外部が存在する周辺部分計測領域に対しては、全体計測領域の内部の第1の領域と外部の第2の領域とに分割し、全体計測領域の外部が存在しない中央部分計測領域に対しては、周辺部分計測領域の分割パターンによって第1の領域と第2の領域とに分割するステップと、第1の領域上に第1の直交関数系を構築するステップと、全体計測領域における各部分計測領域に対して、第1の領域上に第1の直交関数系の各関数の線形結合を第1のシステムエラーとして定義するステップと、線形結合における係数を変数として含む整合性関数を構築するステップと、整合性関数を最適化することにより決定された変数からシステムエラーを算出するステップとを有することを特徴とする。
(もっと読む)
物体の姿勢を求める方法及びシステム
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
光学系の光学面の間隔を測定する方法及び装置
【課題】本発明の目的は、単レンズ又は多レンズ光学系の光学面の間隔が確実かつ高精度に測定され得る装置及び方法を指定することである。
【解決手段】多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法の場合に、光学系のセンタリング状態は、光学系(38)の少なくとも2つの光学面(S1、S2、S3)を考慮することにより記録される。光学系(38)は、センタリング状態を考慮して、光学系(38)の光軸(40)が参照軸(34)とできる限り揃うように調節される。次のステップでは、光学面(S1、S2、S3)の間隔が、短コヒーレンス干渉計(24)を用いて決定される。この目的のために光学系(38)に向けられる測定光線(50)は、参照軸(34)に沿っている。試験片(38)の事前の調節により、光学系の少なくとも2つの光学面を考慮して、高精度の測定が得られる。
(もっと読む)
表面形状測定方法
【課題】表面形状測定機の測定視野以上の測定領域の測定をするに際して、複数の測定結果の繋ぎ合せを簡易に行うことを可能とし、オーバーラップ領域を低減して全体の測定時間を削減し、さらに一定の累積誤差の発生を低減することが可能な表面形状測定方法を提供すること。
【解決手段】面測定データの繋ぎ合せ時に回転方向の補正を行わず、面測定データの平行移動のみを行い面測定データを合成して合成面測定データを取得するようにする。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
1 - 20 / 233
[ Back to top ]