
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
121 - 140 / 1,900
位置姿勢計測装置、位置姿勢計測方法
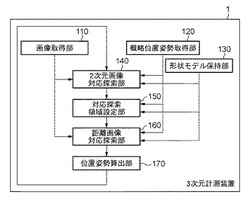
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム

【課題】穴のある被検物に対して、その穴の内側の形状を効率よく適切に測定することができる形状測定装置を提供する。
【解決手段】中空状の被検物の内面に測定光を照射するとともに、該被検物に照射した測定光を受光して、被検物の形状を測定する形状測定装置は、被検物に照射するライン状の測定光を出力する光出力部と、光出力部と隔てて設けられ、予め定められた方向から受光する測定光の散乱光を検出する受光部と、測定光を検出する位置に応じて受光部の位置が調整され、照射した光の出力位置と、受光部の位置との距離に応じて被検物との距離を算定する制御部と、を備える。
(もっと読む)
帯状部材の継ぎ目形状測定方法とその装置及び変位量計測装置
【課題】測定装置もしくは帯状部材を移動させることなく、帯状部材の継ぎ目形状を精度よく測定する。
【解決手段】レーザー照射手段12によりカーカスプライ20の表面にコードの延長方向に直交する方向に延長するライン光を入射角45°で照射し、その反射光のうちの前面散乱光R1を撮影手段13で直接受光し、正反射光R2を第1の光学素子14で反射させ側面散乱光R3を第3の光学素子15で反射させてそれぞれ撮影手段13に受光させる構成とすることで、前面散乱光R1による画像である上面像G1と、正反射光R2による画像である正面像G2と側面散乱光R3による画像である側面像G3とを撮影し、撮影された上面像G1と正面像G2と側面像G3とを用いてカーカスプライ20の継ぎ目部分を含む照射部を3方位から見たときの変位量h1,h2及びh3を求め、変位量h1,h2及びh3を用いてカーカスプライ20の照射部の厚さを求める。
(もっと読む)
パターン検査方法およびパターン検査装置
【課題】同一仕様で形成され同一方法で保持された複数の平面基板上の、同一箇所に形成された同一パターンの形状を確実に順次検査するための簡単な方法を提供すること。
【解決手段】1枚目の検査対象基板に対して、検査のためのカメラと検査対象となるパターンとの撮像距離を順次変化させて各撮像距離で撮像して合計で複数の画像情報を入力し、入力した複数の画像情報を予め登録してある登録画像情報と比較して、登録画像情報に最も類似した一画像の情報を複数の画像情報の中から選択して、検査判定するとともに、選択した画像情報に対応する撮像距離をカメラ最適高さとして特定し、2枚目以降の平面基板上の同一箇所に形成された同一パターンの形状検査において、カメラ最適高さとした撮像距離で検査することを特徴とするパターン検査方法。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
CCDカメラを使用した測定装置、及びその応答時間の短縮方法
【課題】CCDカメラの飽和露光量を超える過大な入力光量に対して、最短時間で測定可能なCCDカメラ信号を得ることが可能な測定装置、及びその応答時間の短縮方法を提供することを目的とする。
【解決手段】CCDカメラ1aの露光時間を制御する測定装置100の応答時間の短縮方法であって、CCDカメラは、異なる透過率の2つ以上のフィルタ出力を同時に使用し、入力光量の最小値を検出する第1の透過率の大きいフィルタ出力の測定範囲の最大値(飽和値)と、第2の透過率の低い第2のフィルタ出力の測定範囲の(最小値)とがラップするような透過率とし、第1のフィルタ出力が飽和している場合には、前記第2のフィルタ出力から、前記第1の透過率と前記第2の透過率との比率から、前記第1のフィルタ出力に換算した露光時間の補正ゲインを求め、一回の制御周期(測定周期)で入力光量を検知し、次の制御周期で第1のフィルタの露光時間を更新する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
形状測定装置
【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
圧着端子の検査装置およびそれを備えた電線処理装置
【課題】圧着端子をより正確に検査することができ、構成の簡単化または検査時間の短縮を図ることのできる圧着端子の検査装置を提供する。
【解決手段】検査装置40は、第1検査ユニット41、第2検査ユニット42、および第3検査ユニット43を備える。第1、第2、第3検査ユニット41,42,43は、それぞれ連続端子30の移動経路から外れた位置に配置された第1、第2、第3投光装置および第1、第2、第3受光装置61,62,63を備える。第1投光装置は、端子35の長手方向に延びる帯状の第1の光71を照射する。第2および第3投光装置は、端子35の長手方向と直交する方向に延びる帯状の第2の光72を照射する。コンピュータは、第1、第2、第3受光装置61,62,63の各受光量に基づいて、端子35の良否を判定する。
(もっと読む)
三次元形状計測装置、プログラム、コンピュータ読み取り可能な記録媒体、及び三次元形状計測方法
【課題】広い視野に渡る計測対象の三次元形状情報を迅速かつ容易に計測する。
【解決手段】三次元形状測定装置10は、計測対象に投影された光パタンを解析することによって、計測対象の三次元形状を計測する装置である。ここで、三次元形状測定装置10は、光パタンが投影された計測対象を画像として読み取るためのラインセンサ16と、ラインセンサ16により読み取られた画像における光パタンを空間縞解析法に基づいて解析して、計測対象の三次元形状の情報を算出する画像解析部とを備えている。
(もっと読む)
周辺監視装置
【課題】簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供する。
【解決手段】他車両22が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両22の位置を測定する周辺監視装置であって、自車両21進行方向の路面上の所定領域を検出領域Rとして、該検出領域Rに、他車22両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、前記検出手段で検出された、自車両21から見た前記光投影パターンに基づいて、自車両21の進行方向に対する他車両22の進行方向の角度を測定する測定手段とを備える。
(もっと読む)
3次元計測装置
【課題】位相シフト法による3次元計測を可能にしながらも、液晶シャッタにおける隣接する画素の透過率を連続的に変化させる場合に比べて応答時間を短縮する。
【解決手段】投影装置1は、光源11と、処理装置3からの制御信号により透過率が個別に制御される画素が2次元格子上に配列された液晶シャッタ12と、光源11から出力され液晶シャッタ12を透過した光束の少なくとも一部を混合して計測対象4の表面に照射させるレンズ13とを備える。処理装置3は、液晶シャッタ12にそれぞれ複数列の画素からなり平均透過率が周期的に変化する複数の帯領域を形成させるように制御信号を出力し、レンズ13は、帯領域を透過した光束を混合して計測対象4の表面に縞状の光パターンを形成させる。
(もっと読む)
レジストの光学特性を変化させる方法及び装置
【課題】集積回路のような電子素子の製造において、光計測を用いた測定の精度を改善する方法及びシステムを提供する。また、調節可能なレジストの光学特性を変化させる方法及びシステムを提供する。
【解決手段】その調節可能なレジスト層は反応性ガス、液体、プラズマ、放射線若しくは熱エネルギー又はこれらを結合させたものを用いて処理されて良い。それによってフォトレジストは露光前に第1組の光学特性と異なる第2組の光学特性を得て、露光波長で又はその近傍の放射線に対して透明ではなくなり、OTSM構造420が光線425、426及び427を反射する。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
光学素子、光学素子を備えた顕微鏡装置ならびに光学素子の組み立て方法
【課題】液晶光学素子の光軸を対物レンズの光軸に位置合わせできる光学素子を提供する。
【解決手段】光学素子(103、10)は、対物レンズ(104)よりも光源(101)側に配置され、液晶分子が含まれる液晶層と、その液晶層を挟んで対向するように配置された二つの第1の透明電極とを有し、その液晶層を透過する光源から発した所定の波長を持つ直線偏光の位相または偏光面を、二つの第1の透明電極の間にその所定の波長に応じた電圧を印加することにより制御する液晶光学素子(3、12、13)と、液晶光学素子(3、12、13)の光軸を対物レンズ(104)の光軸と位置合わせ可能なように液晶光学素子(3、12、13)を対物レンズ(104)に対して相対的に移動可能な光軸調整機構(4、14)とを有する。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
計測対象の3次元表面形状算出方法及び3次元表面形状計測装置
【課題】
位相シフト方法による計測対象の3次元形状の計測では、少なくも3種類以上の位相を変えた縞パターンの投影が必要であり、縞パターンの切替、撮像の時間等の計測に時間が掛る課題がある。
【解決手段】
分離可能な異なる2色と各々位相の異なる4種類の縞パターンの2つから合成した異なる2種類の合成縞パターンを計測対象にカラー投影して撮影したカラー画像の色分離を行って撮像画像の縞パターンの位相を算出して計測対象の3次元表面形状の計測を行う。
(もっと読む)
3Dパターンマッチング方法
【課題】 レーザ計測等によって得られた3次元の点群データから対象物を精度よく検出する。
【解決手段】 レーザ計測によって得られた3次元の点群データに対して、ノイズを除去するためのリサンプリング処理を施す。そして、予め用意されたテンプレートとのマッチングを行う。テンプレートマッチングでは、まず、点群データおよびテンプレートを、共に所定サイズの格子に区切り、各格子内に存在するデータ点数をその格子の特徴量とする。こうして定義された特徴量に基づいて、点群データとテンプレートとを照合することによって、両者の位置関係、一致/不一致を比較的容易に判定することができる。テンプレートマッチングによって対象物が検出された後は、ICPマッチングによって、テンプレートと点群データとの位置関係をより精密に合致させ、対象物の検出を行う。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
121 - 140 / 1,900
[ Back to top ]