
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
41 - 60 / 1,900
回折構造体、広帯域、偏光、エリプソメトリおよび下地構造の測定
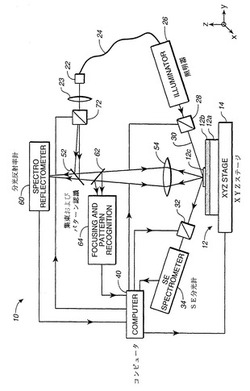
【課題】高感度の分光散乱計を提供する。
【解決手段】半導体ウェハ上の回折構造体からの回折の前に、必要な場合は、分光反射率計または分光エリプソメータを使って構造体の下に位置する膜の膜厚と屈折率とをまず測定する。そして、厳密なモデルを使って回折構造体の強度またはエリプソメトリックな署名を計算する。次に、偏光放射線および広帯域放射線を用いた分光散乱計を使って回折構造体を測定して回折構造体の強度またはエリプソメトリックな署名を得る。この署名をデータベース内の署名と適合させて構造体の格子型パラメータを判定する。
(もっと読む)
対象物の三次元座標を決定する方法および装置

【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が一定範囲とされた支持基準体であるエンコーダ本体2aと、エンコーダ本体2aに対し全周回転自在に軸支された駆動する回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離されて、エンコーダ本体2aの回転角度を光学式角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】屈折率が未知の誘電体薄膜の膜厚を正確に測定することができる膜厚測定装置および膜厚測定方法を提供する。
【解決手段】膜厚測定装置は、第1の反射干渉光および第2の反射干渉光のそれぞれについて第1の波長分布および第2の波長分布を生成する波長分布生成部72と、第1の波長分布および第2の波長分布にもとづいて、それぞれ第1の入射角に対応する第1の光路差および第2の入射角に対応する第2の光路差を求める光路差算出部73と、入射角、膜厚および屈折率を変数とした関数として光路差を表した式を用いて、第1の入射角および第2の入射角ならびに光路差算出部73に算出された第1の光路差および第2の光路差を式に代入することにより、薄膜の膜厚および屈折率を求める膜厚屈折率算出部74と、を備える。
(もっと読む)
リニアインダクションモータとリアクションプレートとの隙間モニタリング装置
【課題】リアクションプレートとリニアインダクションモータとの隙間を連続的に測定する。
【解決手段】本発明のリニアインダクションモータとリアクションプレートとの隙間モニタリング装置は、リニアインダクションモータ2に該リアクションプレート4の幅方向両端部位に臨むよう各々取り付けられ、リアクションプレート4との高さを計測する複数の非接触式変位センサ3と、これら複数の非接触式変位センサ3による計測値と、所定地点のリアクションプレート4Aを通過したときに計測した該リアクションプレート4Aとの距離とを比較してリアクションプレート4とリニアインダクションモータ2とのギャップを求めるデータ処理部10と、を備える。
(もっと読む)
熱画像データ保存装置
【課題】監視対象となる高温物が所定の撮像位置に位置したことを検出するための機械的リミットスイッチを用いず、それを設置するためのスペース及び作業コストが不要になる熱画像保存装置の提供。
【解決手段】熱画像2aを生成する熱画像生成手段2には、熱画像2aの処理を行う熱画像処理手段3が接続されている。熱画像処理手段3には、取鍋4が所定の撮像位置に位置した際に熱画像2a内で取鍋4が占める領域内の温度を監視して、領域内の温度が所定の検出用閾値以上である場合に、取鍋4が撮像位置に位置したことを検出する位置検出部30が含まれている。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
刻印装置
【課題】刻印試験を短時間で行うこと。
【解決手段】刻印装置1は、鋼片製品を固定する製品固定部2と、刻印試験を行うための鋼片製品と同種の鋼片試料を固定する試料固定部3と、製品固定部2および試料固定部3にそれぞれ固定された鋼片製品および鋼片試料に刻印ピン4bを押圧することによって鋼片製品および鋼片試料の表面に刻印を付与する刻印付与部4と、を備える。このような構成によれば、刻印試験を行う際、製造ラインに製品が搬送されてくるまで待機する必要がなくなるので、刻印試験を短時間で行うことができる。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
欠陥検査装置
【課題】製造ラインを連続して搬送される開口を塞ぐシール部を有する被検査物に対して、特殊領域特定のために準備工程を必要とせず、検査時間の大幅な短縮が可能な、効率の良い検査性能に優れた検査装置を提供する。
【解決手段】容器を搬送する手段と、第一の光学手段と、第一の光学手段の容器搬送方向の下流に設けられた第二光学手段と、第一の特殊領域特定手段と、第一の特殊領域に基づいてシール部の液漏れ欠陥を検出する第一の検査手段と、前記エッジ座標と、第一の撮像手段と第二の撮像手段の取り付け角度の角度差と、第一の撮像手段と第二の撮像手段から得られた撮像画像における検査領域の中心座標から、第二の撮像手段によって得られた画像の第二の特殊領域を特定する第二の特殊領域特定手段と、第二の撮像手段によって撮像した画像の第二の特殊領域に基づいて容器の異物欠陥を検出する第二の検査手段と、を備えたことを特徴とする欠陥検査装置。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
足背高測定法及びその測定法を使用した足型測定器
【課題】足型測定器において、撮像手段により足の側方を撮影する場合、撮像手段と足の距離を正確に測定できないことから足背部の高さの正確な測定ができないという不都合を解決し、足背高の正確な測定を含む足型測定器を提供すること。
【解決手段】足型測定器の撮像手段で取得した足裏画像において、第2足指の先端と踵の最後端を結ぶ線上の各点と撮像手段の光学的中心との距離を測ることにより、撮像手段と足との間の距離を特定できる。撮像装置と種々の距離での既知高の物体の画素単位での測定値と物体の実寸法との関係から変換式を事前に求めておくことにより、足の側方画像から求めた画素単位での足背高を実寸法に変換することができる。この手法により、足背高の測定を含む足型測定器を提供する。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
計測装置
【課題】簡易な構成で参照面と被検面との間の絶対距離を高精度かつ高速に計測可能な計測装置を提供すること
【解決手段】波長走査干渉計は、複数の光源IL1〜IL3と、複数の光束を合成するビームスプリッタ103bと、ビームスプリッタ103bからの光を参照光束と被検光束に分割し、干渉計ユニット300によって検出された干渉信号に基づいて参照面と被検面との間の絶対距離を決定する処理部107と、を有する。干渉計ユニットは、複数の種類の光束に対応する複数の種類の干渉縞のそれぞれを、合成された干渉信号S100として検出する単一の光検出部106を有し、処理部は、合成された干渉信号に対してFFTを行って複数の種類の光束のそれぞれについて絶対距離L1〜L3を取得し、取得した複数の絶対距離を演算して一つの絶対距離L4を出力する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
計測装置
【課題】高速かつ高精度に被検面の形状を計測することが可能な計測装置を提供すること
【解決手段】計測装置は、光コム光源101から射出された光束を、被検光束と参照光束に分割するPBS15と、前記参照光束と前記被検光束の光路長差を変化させる遅延素子9と、前記被検光束と前記参照光束が干渉して形成する干渉縞を撮像する撮像素子24と、遅延素子が光路長差を変化させて撮像された干渉縞の信号に基づいて被検面23の位置を算出する解析器25と、を有する。
(もっと読む)
タービン組立静止部品の位置計測装置
【課題】熟練者でなくても容易迅速にタービン組立静止部品の位置を計測する装置を提供する。
【解決手段】位置計測装置は、タービンの回転中心に沿ってレーザー光21を出射するレーザー光源部1と、レーザー光の光軸に対して45度の傾斜角度で配置され、上記出射レーザー光の一部を90度の角度で反射してタービンの静止部品11に照射する反射鏡兼透過鏡33と、この鏡を透過したレーザー光を受光する第1の受光器34と、上記静止部品に照射されて反射し上記反射鏡兼透過鏡を透過したレーザー光を受光する第2の受光器35と、上記反射鏡兼透過鏡と第1の受光器と第2の受光器とを収容する筺体31と、受信信号を演算してレーザー光源部から静止部品までの回転中心に沿う距離と上記回転中心から静止部品表面までの距離を演算する制御演算装置2とを備え、上記筺体がタービンの回転中心周りに回転自在に構成されている。
(もっと読む)
41 - 60 / 1,900
[ Back to top ]