
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
141 - 160 / 1,900
ウエハの特性決定のための方法とシステム
【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置

【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
マーク検出方法及び装置、並びに露光方法及び装置
【課題】物体に設けられた複数のマークをより短時間に高精度に検出する。
【解決手段】ウエハマークの位置を検出するマーク検出方法であって、複数のアライメント系AL1,AL21〜AL24の検出領域に対してウエハWを移動中に、アライメント系AL1,AL21〜AL24とウエハWの表面とのデフォーカス量を計測し、この計測結果に基づいてウエハWの面位置及び傾斜角の少なくとも一方を制御し、ウエハマークWMC1,WMA1,WMD1がアライメント系AL22,AL1,AL23の検出領域内に達したときに、ウエハWを静止させて、アライメント系AL22,AL23で対応するウエハマークWMC1,WMD1の位置を検出する。
(もっと読む)
三次元距離計測装置、三次元距離計測方法、およびプログラム
【課題】距離計測対象領域を複数の局所領域に分割して並列処理を行う場合には、距離計測点の空間分解能に対応した各局所領域の演算処理量の均一化も考慮されていないため、並列処理化による処理時間の短縮効果が損なわれる。
【解決手段】パターン光が投光された計測対象物の撮像画像から、当該計測対象物の距離情報を算出する距離情報算出部と、パターン光の計測点の空間分解能を、局所領域ごとに適応的に設定可能な局所パターン設定部と、を有し、局所パターン設定部は、距離情報算出部の演算量に関する情報に基づき、パターン光の計測点の空間分解能を設定する。
(もっと読む)
レーザ照射装置
【課題】容易に迅速に軸合わせができるとともに、軸合わせの前に行われる防風工程を省略できる立軸形水車及び立軸形発電機の軸受用の部材の軸合わせに適用可能なレーザ照射装置を提供する。
【解決手段】レーザ照射装置10は、円周部に円弧状の溝170b1が開口されるとともに中心部に孔170cが貫通され玉軸受170bと溝170b1に回転自在に係合される複数の球体170aとを有する支持部170と、球体170aよりも径が大きい略球形状の球体部10aと、球体部10aに取り付けられ球体部10aに重力を加える錘部10dと、球体部10aに取り付けられレーザ光線を照射するレーザ発光部10cと、を備える。
(もっと読む)
面形成支援システム、面形成支援装置、及び面形成支援プログラム
【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
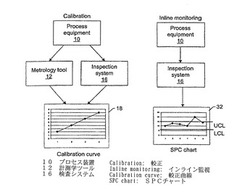
不良検出システムの改良
【課題】パターンを形成したウェハの検査において、表面の内部もしくは表面上の異常の有無を判定できる表面検査法を提供する。
【解決手段】サンプル表面20aからの散乱光は表面20aに対して垂直な線に対して略対称の光を集束する集束器38,52によって集束される。集束光は、異なる方位角で経路へと導かれ、集束した散乱光の線に対する相対的方位角位置に関する情報が保存される。集束光は、垂直な線に対して異なる方位角で散乱した光線を表すそれぞれの信号に変換される。異常の有無および/または特徴は、この信号から判定される。あるいは、集束器38,52によって集束された光線は、予測されるパターン散乱の角度差に対応する角度の環状ギャップを有する空間フィルタによって濾波され、狭角および広角集束経路から得た信号は比較され、マイクロスクラッチと粒子との間を識別する。
(もっと読む)
膜厚測定方法及び膜厚測定装置
【課題】 膜厚測定方法及び膜厚測定装置に関し、簡単な装置構成により、高速且つ高精度で基板上に形成された大面積の薄膜の膜厚を測定する。
【解決手段】 測定対象となる試料一方向に移動させながら、可視光乃至近赤外光領域の線状の連続波長光を前記試料に照射し、試料からの反射光を1ライン毎に撮像手段により撮像し、撮像した1ライン毎の試料の位置と波長とを座標とした各分光波形データについて、各所定の位置毎に第1主成分乃至第K主成分を求めて第1主成分乃至第K主成分のセットからなる分光波形特徴データを作成し、各所定の位置毎に分光波形特徴データを参照用テーブルと比較して最も一致度の高い膜厚値を求め、各所定の位置毎に求めた各膜厚値から二次元膜厚分布を作成する。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
写真測量法による測定システム
【課題】オブジェクト上の点がカメラの視野から隠れている場合でも、この点の座標を取得することができる測定システムを提供する。
【解決手段】測定システムは、オブジェクトに対して位置決めされる任意の数のミラーユニットと、オブジェクト及び任意の数のミラーユニットの画像を生成する任意の数のカメラと、画像、オブジェクトに対する任意の数のカメラの複数の位置、画像内の任意の数の基準点、及び任意の数のミラーユニットの任意の数の位置を使用して、複数の点の複数の座標を特定する一の測定モジュールを備える。
(もっと読む)
眼鏡レンズ加工形状取得方法
【課題】 眼鏡レンズの段付き加工形状を含む眼鏡レンズ加工形状を取得する。
【解決手段】 眼鏡フレームのリムに取り付けられている備え付けレンズに代えて、備え付けレンズよりコバが厚い屈折力を持つ度付きレンズをリムに取り付けるための眼鏡レンズ加工形状取得方法は、備え付けレンズの輪郭を取得するレンズ輪郭取得ステップと、備え付けレンズがリムに取り付けられた状態で、前記備え付けレンズ面上での、リムの内側境界を取得するリム境界取得ステップと、を有し、備え付けレンズの輪郭に基づいて度付きレンズの外形加工形状を取得し、リムの内側境界に基づいて度付きレンズの段付き加工形状を取得することを特徴とする。
(もっと読む)
携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する方法
【課題】携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する。定規で測るなどの不便を解消し、迅速且つ簡便に物体の正確な実際大きさを測定する。
【解決手段】携帯端末機に備えられたカメラを利用して撮影された物体イメージの大きさ及び物体とカメラとの間の距離を測定し、焦点距離などのカメラの特性と測定された値を利用して撮影された物体の実際大きさを算出する。手順は、(1)携帯端末機に備えられたカメラを利用して撮影された物体イメージを認識する段階と、(2)前記段階(1)で認識された物体イメージの大きさを測定する段階と、(3)前記物体と前記カメラとの間の距離を測定する段階と、(4)前記カメラの特性、前記段階(2)で測定された物体イメージの大きさ、及び前記段階(3)で測定された前記物体と前記カメラとの間の距離を利用して前記物体の実際大きさを算出する。
(もっと読む)
ラベル作成用処理プログラム及びラベル作成処理方法
【課題】ラベルのサイズを自動的に決定することで操作負担を低減し、操作者の利便性を向上する。
【解決手段】操作端末10の制御回路102は、対象物Fの実寸法Bを決定する基準となる基準物Kの実寸法Aを取得し、タッチパネル112に表示される基準物Kの表示寸法A′と貼り付け領域Zの表示寸法B′との寸法比A′/B′を取得し、取得された基準物Kの実寸法Aと寸法比A′/B′とを用いて、貼り付け領域Zの実寸法Bを算出し、算出された貼り付け領域Zの実寸法Bに基づき、対象物Fに貼り付けるラベルLのサイズを設定するための、ラベル作成用処理プログラムを実行する。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
カム表面の観察方法
【課題】カム表面を観察することのできる、広視野レーザ顕微鏡を用いた新規のカム表面の観察方法を提供する。
【解決手段】テレセントリックfθレンズ8の焦点面近傍に近接配置したカム表面10からの反射光をテレセントリックfθレンズ8により平行光束に変換し、走査ミラー7で反射させた後に、結像レンズ11によって集光してテレセントリックfθレンズ8の焦点面と共役の位置に設置したピンホール12aを通過させ、ピンホール12aを通過した反射光の光量を受光素子13で計測する。カム表面10を有するカムシャフト9をその軸zを中心に回転させるとともに、レーザ光に対してカム表面10が常に垂直になり、かつ、レーザ光の焦点が常にカム表面10に位置するように、カムシャフト9を移動させながら観察する。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】欠陥検査装置のレシピで設定するセル領域の設定を自動化する方法を提供する。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
(もっと読む)
光学装置、スキャン方法、リソグラフィ装置及びデバイス製造方法
【課題】センサのコスト及び嵩増大、及び/又は測定の精度不良を回避又は低減する光学スキャン機構を提供する。
【解決手段】装置は、リソグラフィ基板W上のマーク202の位置を測定する。測定光学システムは、マークを放射スポットで照明する照明サブシステムと、マークによって回折した放射を検出する検出サブシステム580とを備える。傾斜ミラー562は、放射スポットを、マーク自体のスキャン運動と同期して測定光学システムの基準フレームに対して移動させて、正確な位置測定値を取得するより多くの時間を提供する。ミラー傾斜軸568は、ミラー平面と対物レンズ524の瞳面Pとの交点に沿って配置され、スキャンのアーティファクトを最小限にする。他のタイプの装置、例えば共焦顕微鏡におけるスキャンのために同じ幾何学的構成を使用できる。
(もっと読む)
141 - 160 / 1,900
[ Back to top ]