
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
101 - 120 / 1,900
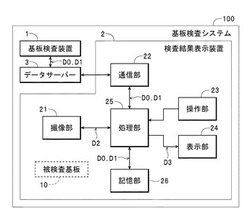
検査結果表示装置、基板検査システムおよび検査結果表示方法
【課題】不良が生じている検査ポイント、および正常な検査ポイントを確実かつ容易に認識させる。
【解決手段】検査結果表示装置2は、個別的に付与された基板情報が二次元コードによって基板表面に記されると共に各検査ポイント毎の検査結果データD1が基板情報に関連付けて記録されている被検査基板10を撮像して撮像データD2を出力する撮像部21と、データD2に基づいて、データD2の画像内における二次元コードの位置決め用シンボルの位置を特定すると共に、被検査基板10における位置決め用シンボルと各検査ポイントとの位置関係を特定可能な位置データD0に基づいてデータD2の画像内における検査ポイントの位置を特定し、かつ、データD1に基づいて特定した各検査ポイント毎の検査結果を示す結果表示をデータD2の画像内における検査ポイントの位置に重ねた検査結果表示画面を表示部24に表示させる処理部25とを備えている。
(もっと読む)
三次元計測装置

【課題】三次元計測を行うにあたり、計測効率の低下を抑制しつつ、計測精度の向上等を図ることのできる三次元計測装置を提供する。
【解決手段】基板検査装置10は、プリント基板1を搬送するコンベア13と、プリント基板1の表面に対し斜め上方から所定の光を照射する照明装置14と、当該光の照射されたプリント基板1を撮像するカメラ15とを備えている。照明装置14は、第1照明14A〜第8照明14Hを備えている。そして、三次元計測を目的として第1輝度のパターン光の下で複数回の撮像が行われる合間に、三次元計測を目的とした第2輝度のパターン光の下での複数回の撮像や、輝度画像データを取得することを目的とした第1輝度及び第2輝度の各色成分の均一光の下での撮像が行われる。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
検出対象物について頭部分の位置および軸部分の方向を算出する方法、装置およびプログラム
【課題】第1の径を有する軸部分と、軸部分の一端に設けられた第1の径より大きな第2の径を有する頭部分とを含む検出対象物について、頭部分の位置および軸部分の方向をより高速に算出する方法、装置およびプログラムを提供する。
【解決手段】本方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、入力画像から、軸部分に相当する領域を軸領域として抽出するステップと、入力画像内の明るさの変化から頭部分の候補位置を抽出するステップと、軸領域および候補位置についての高さ情報を取得するステップと、軸領域との間の相対的な位置関係から、軸領域に対応する検出対象物の頭部分に相当する位置を候補位置から抽出するステップとを含む。
(もっと読む)
列車停止位置の検出方法及び検出装置
【課題】どのような路線に対しても低コストで導入でき、また装置の保守や点検に手間をかけることなく、列車停止位置を正確に検出する。
【解決手段】本発明の列車停止位置Pの検出方法は、停止動作中の列車Tの前面に対してスポット状の測定光2を左右方向に沿ってライン状に走査しつつ照射する距離センサ3を用いて、距離センサ3から列車Tの前面までの距離を測定し、測定された距離に基づいて、列車Tの停止状態及び停止位置を検出する。
(もっと読む)
内視鏡装置および計測方法
【課題】計測に適した条件であるかを短時間で判定できる内視鏡装置および計測方法を提供する。
【解決手段】本発明の内視鏡装置1は、第一光源41からの照明光の出射状態を所定の周期で変化させ、第一光源41から照明光が出射されている状態では第二光源51からの投影光の出射を停止させ、第一光源41からの照明光の出射が停止されている状態では第二光源51から投影光を出射させ、照明光により被検物が照明された明視野画像を第一光源41から照明光が出射されている状態で撮像部30に取得させ、被検物に縞パターンが投影されたパターン投影画像を投影光が出射されている状態で撮像部30に取得させ、撮像部30が取得したパターン投影画像を用いて被検物の三次元形状を計測し、パターン画像を用いた計測によって得られた情報を明視野画像とともにモニター28に表示させるメイン制御部22を備える。
(もっと読む)
走行車両のタイヤの変形状態を検出する検出装置および検出方法
【課題】簡単な構成で、効率よく正確に、走行車両のタイヤの変形状態を検出することが可能な、検出装置および検出方法を提供する。
【解決手段】走行車両5のタイヤ6の変形状態を検出する検出装置1は、撮像手段2と、記憶手段3と、判定手段4とを備える。撮像手段2は、走行車両5に搭載され、検出エリアPにおいて路面8に設けられた所定パターン7の画像を撮像するものである。記憶手段3には、タイヤ6の変形前に、検出エリアPにおいて撮像手段2によって予め撮像された所定パターン7の画像が基準画像として記憶されている。判定手段4は、検出エリアPにおいて撮像された画像と、記憶手段3に記憶された基準画像とを比較し、当該2つの画像における所定パターン7の変化に基づいて、タイヤ6の変形状態を判定する。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
内視鏡装置および画像取得方法
【課題】取得された複数の画像間の位置ずれを抑えることができる内視鏡装置を提供すること。
【解決手段】第一光源からの照明光の出射が開始されてから照明光の光量が安定するまでの時間waと、第二光源からの投影光の出射が開始されてから投影光の光量が安定するまでの時間wbとに基づいて、照明部と縞投影部とのうち光量が安定するまでの時間が長い方を先に動作させて被検物の第一の画像を撮像部に取得させ、照明部と縞投影部とのうち光量が安定するまでの時間が短い方を第一の画像の取得後に動作させて被検物の第二の画像を撮像部に取得させることを特徴とする。
(もっと読む)
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法
【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
計測装置
【課題】被計測面の高さの計測において、計測精度の高精度化と計測範囲の広範囲化との両立に有利な技術を提供する。
【解決手段】参照光と計測光との干渉光強度を検出する複数の領域が2次元状に配列された検出部と、光源からの光を第1と第2の光に分離する第1の光学系と、第1の光が平行光で入射され2次元状の光路長差を有する複数の参照光束を生成する生成部と、生成部で生成された参照光の複数の参照光束のそれぞれが対応する複数の領域に入射するように、検出部に入射させる第2の光学系と、第2の光を被計測面の計測点に集光する第3の光学系と、計測点で反射された第2の光が複数の領域のそれぞれに入射するように、検出部に入射させる第4の光学系と、複数の領域のそれぞれに入射する複数の参照光束が有する光路長と複数の領域との対応関係に基づいて、複数の領域で検出される干渉光の強度から計測点における被計測面の高さを算出する処理部を有する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マシンビジョンシステムにおける潜在的な干渉要素の検査
【課題】マシンビジョンシステムにおける潜在的な干渉要素の検査を提供する。
【解決手段】マシンビジョン検査システムにおいて使用するためのロバストなビデオツールが提供される。ロバストなビデオツールには、関心領域と、ユーザインターフェースと、エッジ検出動作と、関心領域において検出されたエッジ点を含むと同時に除外領域におけるエッジ点を除外する現在の要素のエッジ点セットを決定する除外領域動作と、が含まれる。除外領域は、少なくとも1つの予め特徴付けられた要素、すなわち、予め特徴付けられた要素のエッジ点を検出し、かつ予め特徴付けられた要素の寸法パラメータを特徴付けるビデオツールを用いることによって特徴付けられる要素である少なくとも1つの予め要素付けられた要素に基づいて、除外領域ジェネレータによって決定される。
(もっと読む)
3次元計測装置
【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
3次元形状測定方法および基板検査方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定方法は、測定対象物の第1測定領域で第1画像を撮影する段階と、第1中央処理ユニットを通じて前記第1画像を演算処理し、前記第1測定領域での3次元形状を算出する段階と、前記第1中央処理ユニットが前記第1画像を演算処理する間に、前記測定対象物の第2測定領域で第2画像を撮影する段階と、第2中央処理ユニットを通じて前記第2画像を演算処理し、前記第2測定領域での3次元形状を算出する段階と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
101 - 120 / 1,900
[ Back to top ]