
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
81 - 100 / 1,900
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
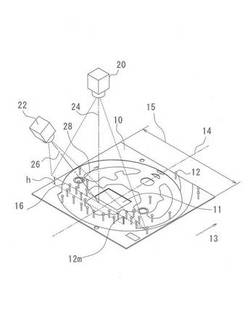
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
シート材端部の観察・評価装置及び方法

【課題】 シート材を高速搬送させても短時間で観察画像を取得することができ、シート材が搬送方向と垂直な方向であって、前記観察部の視野内にある前記シート材の搬送方向と直交する方向(つまり、シート材の厚み方向や幅方向)にバタツキや揺動を生じたとしても、観察画像の品質及び評価の質が損われることを防ぐことができる、シート材端部の観察・評価装置及び方法を提供する。
【解決手段】 観察対象となるシート材の端部を搬送させながら観察し、
観察視野範囲の一部分を観察領域として登録し、当該領域を別個に複数登録でき、当該観察部の外部から複数の部分観察領域を選択するかを指示して、複数登録された中から一つの部分観察領域に切り替える部分観察領域切替機能を有し、
シート端部位置検出器から得られた信号に基づいて観察部に対して部分観察領域が切り替わるように信号出力する、シート材端部の観察評価装置及び方法。
(もっと読む)
ホースクリップ組付け状態検査方法
【課題】ホースクリップが周方向の所定位置に組付けられているかどうかを容易に管理することが可能なホースクリップ組付け状態検査方法を提供する。
【解決手段】ゴムホース及びこのゴムホースに組み付けられたホースクリップをカメラで撮像する工程と、これらのゴムホース及びホースクリップの画像を検査パターンに画像処理する工程と、この検査パターンを、予めホースクリップの合格パターンとして記憶されたホースクリップの所定周方向組付け位置のパターンと比較する工程と、ホースクリップの周方向組付け位置の合否を判定する工程と、を備える。
(もっと読む)
抗菌加工品の抗菌性能の評価方法
【課題】抗菌剤の抗菌性能の評価に要する時間および費用を低減する。抗菌剤の抗菌性能の評価において、細菌培養を行うことなく間接的な方法によって簡易な評価方法を提供する。さまざまな形状の抗菌加工品の各部位の抗菌性能を評価する方法を提供する。
【解決手段】本願発明の抗菌の抗菌性能の評価方法は、抗菌剤の少なくとも一部が表面から露出してなる抗菌加工品の抗菌性能を評価する評価方法であり、抗菌加工品の表面上に設定した関心領域の画像を取得し、関心領域において表面から露出する抗菌剤の露出の程度を表す露出率を画像から求め、予め求めておいた露出率と抗菌加工品の抗菌性能との相関関係に基づいて、画像から求めた露出率に対応する抗菌性能を求め、求めた抗菌性能によって抗菌加工品の抗菌性能を評価する。
(もっと読む)
複数カメラの校正方法及び校正システム
【課題】カメラ校正における場所的な要求や演算負荷の要求をできるだけ低減し、車両の組み立てラインに組み込むことが容易となる、複数カメラの校正技術を提供する。
【解決手段】第1校正場の所定位置に当該車両を位置決めし、第1カメラによる基本撮影画像を取得し、基本撮影画像における基本校正指標群の画像上の位置である基本画像座標を算定し、基本校正指標群のワールド座標と基本画像座標との関係を表す第1校正関数を算定する。第2校正場に移動し、第1カメラによる第1撮影画像から第1画像座標を算定し、第2カメラによる第2撮影画像から第2画像座標を算定し、第1画像座標及び第1校正関数及び第1校正指標群のワールド座標を用いて車両姿勢ずれを算定する。車両姿勢ずれと第2画像座標と第2校正指標群のワールド座標とに基づいて、第2画像座標と第2校正指標群のワールド座標との関係を表す第2校正関数を算定する。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
測定装置
【課題】スピンドルに取り付けられて高い回転数で回転する極小径丸棒若しくは極小径工具の動的振れを測定可能な極めて実用性に秀れた測定装置の提供。
【解決手段】光源と、光源からの光線を被測定部材へ導くレンズ系と、被測定部材を介して光線を受光する複数のフォトダイオードとを備える光学系を有し、フォトダイオードでの受光量をもとに被測定部材の位置若しくは振れ量を測定する測定装置であって、光学系の光軸方向視において、複数のフォトダイオードにして被測定部材の軸心と交差する辺部が全て直線であり、複数のフォトダイオード間には、被測定部材の軸方向に対して傾斜する少なくとも1つのギャップを設け、このギャップの両端部は被測定部材の外形より外方に位置させ、ギャップを形成するフォトダイオードの辺部以外の被測定部材の軸心と交差する辺部がギャップと平行でないように構成する。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】対物レンズの被計測体側に配設された光学素子によりスポット位置を光軸に垂直な面内方向に走査することができるとともにこの光学素子による光学系全体の結像性能の劣化を抑えることができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】三次元画像取得装置10は、共焦点光学系を用いた三次元画像取得装置であって、対物レンズ13の被計測体15側の光軸と交差するよう配設された平行平板形の部材を有し、光軸と垂直な面に対する平行平板形の部材の傾きを異ならせることで、傾きに応じて屈折作用により被計測体側共役点の位置を光軸方向に垂直な面内で変更するXY方向焦点位置変更部14を備え、平行平板形の部材の傾きは、対物レンズ13の被計測体側共役点に集光される光の直径が、エアリーディスク直径の半分となる所定の傾き以下である。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
検査装置および検査方法
【課題】簡素化を図りつつ、対象物を短時間で高精度に検査することができる。
【解決手段】撮像手段11と対象物Tとの間に光軸Oに交差する方向に向けて光線Lを放射する光源12と、光源12から放射された光線Lを撮像手段11の光軸O方向に沿って対象物T側に向けて反射するハーフミラー13と、ハーフミラー13と対象物Tとの間に光軸Oと同軸に配置され、外周面14aにハーフミラー13により反射された光線Lが入射する円錐状または円錐台状の内ミラー部材14と、内ミラー部材14よりも大径の円錐台状の孔部15が光軸Oと同軸に貫設され、孔部15の内周面15aに内ミラー部材14の外周面14aにより反射された光線Lが入射する外ミラー部材16とを備え、外ミラー部材16は、内ミラー部材14の外周面14aから孔部15の内周面15aに入射した光線Lを、対象物Tの外周面T1に垂直に入射するように反射する検査装置10を提供する。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
撮像装置およびその制御方法
【課題】表面形状の計測処理を効率的に行い、撮像装置のスループットを向上させる技術を提供する。
【解決手段】撮像装置が、被写体を保持する保持手段と、前記被写体の表面形状を計測する表面形状計測手段と、前記表面形状計測手段により計測された表面形状に合わせて撮像面を調整して、前記被写体の撮像を行う撮像手段と、前記被写体の全体領域のなかから撮像すべき対象物が存在する存在領域を特定する特定手段とを備える。前記表面形状計測手段は、前記特定手段により特定された存在領域の表面形状のみを計測する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
陽極酸化アルミナの検査装置および検査方法、ならびに陽極酸化アルミナを表面に有する部材の製造方法
【課題】陽極酸化アルミナの状態(微細凹凸構造の形状、欠陥等)を簡易に検査できる検査装置および検査方法、ならびに陽極酸化アルミナの微細凹凸構造の形状等のムラや表面の欠陥が抑えられた、陽極酸化アルミナを表面に有する部材の製造方法を提供する。
【解決手段】モールド100に光を照射するライン状照明装置10(第一の照射手段)と;モールド100の陽極酸化アルミナで反射した光を撮像するカラーラインCCDカメラ12(第一の撮像手段)と;モールド100に光を照射するライン状照明装置20(第二の照射手段)と;モールド100の陽極酸化アルミナで反射した光を撮像するモノクロラインCCDカメラ22(第二の撮像手段)と;2つのカメラによって撮像された画像から得られた色情報および輝度情報に基づいて陽極酸化アルミナの状態の良否を判定する画像処理装置30(画像処理手段)とを有する検査装置を用いる。
(もっと読む)
検査結果表示装置、基板検査システムおよび検査結果表示方法
【課題】不良が生じている検査ポイント、および正常な検査ポイントを確実かつ容易に認識させる。
【解決手段】検査結果表示装置2は、個別的に付与された基板情報が二次元コードによって基板表面に記されると共に各検査ポイント毎の検査結果データD1が基板情報に関連付けて記録されている被検査基板10を撮像して撮像データD2を出力する撮像部21と、データD2に基づいて、データD2の画像内における二次元コードの位置決め用シンボルの位置を特定すると共に、被検査基板10における位置決め用シンボルと各検査ポイントとの位置関係を特定可能な位置データD0に基づいてデータD2の画像内における検査ポイントの位置を特定し、かつ、データD1に基づいて特定した各検査ポイント毎の検査結果を示す結果表示をデータD2の画像内における検査ポイントの位置に重ねた検査結果表示画面を表示部24に表示させる処理部25とを備えている。
(もっと読む)
81 - 100 / 1,900
[ Back to top ]