
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
61 - 80 / 1,900
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
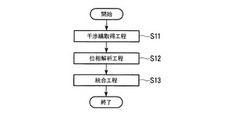
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
3次元物体位置検出装置、そのプログラム

【課題】3次元辞書データから、対象物に関して測定されない領域に該当するデータを除去することで、高精度・高速な照合・認識を実現する。
【解決手段】概要姿勢の推定を行い(S3)、3次元辞書データを概要姿勢に応じて姿勢変換して、「概要変換後の3次元辞書データP’」を作成する(S4)。続いて「概要変換後の3次元辞書データP’」の点群を、測定器から対象物への距離方向と垂直な仮想平面へ投影する(S5)。そして、仮想平面を多数の矩形領域に分割し、各矩形領域毎に、その矩形領域に属する(投影された)複数の点のなかから測定器に最も近い点のみを選択し、選択された点のみから構成される3次元辞書データを再構築することにより、3次元辞書データから対象物に関して測定されない領域に該当するデータを除去する(S6)。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
寸法測定装置、シール面間寸法測定装置およびシール面間寸法測定方法
【課題】自動車のドア側のシール面とボディー側のシール面との間のシール面間寸法を正確かつ短時間で測定する。
【解決手段】少なくとも片面に配置された複数のターゲットマーク13を表にして車両のボディー側に取り付けるボディー側ターゲットボード11と、両面に配置された複数のターゲットマークが表裏から見えるように車両のドア側に取り付けるドア側ターゲットボード12と、車両のボディー側のシール面およびドア側のシール面にレーザ光を照射するレーザ光照射部22と、ターゲットボード11、12を撮影するステレオカメラ23と、撮影したレーザ光からボディー側およびドア側のシール面の断面形状を認識し、撮影したターゲットマーク13を用いてボディー側およびドア側のシール面の断面形状を一致させるように移動させ、ボディー側のシール面とドア側のシール面との間のシール面間寸法を測定する画像処理部30と、を有する。
(もっと読む)
ステレオカメラの取り付け調整方法及びステレオカメラ
【課題】ステレオカメラを自動車等に取り付ける際に、該ステレオカメラの校正距離方向と目的距離方向の調整を容易に行えるようにする。
【解決手段】ステレオカメラ10を自動車40に取り付けて、自動車の直進方向の距離を測定するものとする。ステレオカメラ10は複数の単眼カメラを筐体内に備え、筐体前面を筐体基準面とし、該筐体基準面は反射面を有している。車外に設置されたレーザ光源50の出射光軸と自動車40の直進方向が平行になるように調整した後、レーザ光源50からの出射光をステレオカメラ10の筐体基準面で反射させて、反射光が出射光位置に戻るように、ステレオカメラ10の取り付け姿勢を調整する。
(もっと読む)
回転駆動機構
【課題】複雑な加工を必要とすることなく、有線の装置を360度またはこれを少し超える程度の角度で回転させることができるようにした、回転駆動機構を提供する。
【解決手段】有線装置を搭載して、基板20に対し正逆方向に回転可能に設けられた回転テーブル21と、回転テーブル21に設けられた第1ドグ28と、基板20に設けられて第1ドグ28に押圧されることで変位する第2ドグ29と、第2ドグ29の変位によって押圧されることで回転テーブル21の回転を停止させる一対の規制部とを備えた回転駆動機構である。一対の規制部は回転テーブル21が初期位置から360度以上の設定角度正回転した際に、第2ドグ29に押圧されるように基板20上に配置された第1規制部35aと、回転テーブル21が初期位置から360度以上の設定角度逆回転した際に、第2ドグ29に押圧されるように基板20上に配置された第2規制部35bとを有している。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
(もっと読む)
投影制御装置及び投影制御方法
【課題】投影装置の動作をフレームごとに制御することを可能にする。
【解決手段】投影装置を制御するための投影制御装置は、複数の色成分で構成された映像信号を受信し、受信した映像信号の各フレームについて特定の色成分の情報を制御情報として抽出し、抽出された制御情報に基づいて投影装置の動作を制御するための投影制御情報をフレームごとに生成し、生成した投影制御情報を投影装置に供給する。
(もっと読む)
三次元計測装置、三次元計測方法およびプログラム
【課題】 計測誤差の校正が可能な三次元計測装置を提供する。
【解決手段】
所定のパターンを投影する投影部と、パターンが投影された被写体を撮像する撮像部とを有する三次元計測装置は、撮像部によって撮像された画像において、計測空間内の同一平面上に予め設定された複数のパターン検出領域に投影されたパターンの撮像画素面上の位置情報を検出する検出部と、位置情報を用いて、計測時前に予め検出した投影部の投影画素面上のパターンと計測時における投影部の投影画素面上のパターンとの対応関係を算出する対応関係算出部と、を有する。
(もっと読む)
ガラス基板の表面不良検査装置および検査方法
【課題】ガラス基板の表面不良の判定時間を減らし、NGの可能性の高い表面不良のみを検査員に提供して検査の集中度を極大化させる。
【解決手段】表面不良検査装置は、ガラス基板1の上方にそれぞれ配置され、ガラス基板表面不良に対する第1イメージおよび第2イメージをそれぞれ撮影する撮像装置10および20と、ガラス基板1の下方に配置され、撮像装置10、20側にガラス基板1を透過する暗視野照明装置30と、第1イメージ上の不良の位置座標と、第2イメージ上の不良の位置座標とを演算する検出信号処理部40とを備えている。ガラス基板上面に対する撮像装置10、20の撮影領域P1は互いに重ね合わされ、ガラス基板下面に対する撮像装置10、20の撮影領域P2、P3は、互いに異なるように構成されている。
(もっと読む)
ワーク接触点補正システムおよび旋盤
【課題】簡単かつ高精度に、ワークの被接触面に対するワーク接触部材の接触点の位置を補正できるワーク接触点補正システムおよび旋盤を提供することを課題とする。
【解決手段】ワーク接触点補正システム2は、ワークWの被接触面W1の形状に沿って、該被接触面W1に対する接触点が変化するワーク接触部材21と、ワーク接触部材21を撮像する撮像装置24と、撮像装置24が撮像した画像からワーク接触部材21の外形線に関する実測データR1を取得し、実測データR1を基に接触点の位置を補正する演算部220aを有する制御装置22と、を備えることを特徴とする。
(もっと読む)
長さ測定装置
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
電気転てつ機のロック狂い検知器の位置調整冶具
【課題】電気転てつ機のロック狂い検知器の固定スリット部材の位置合わせを容易に行うことができる電気転てつ機のロック狂い検知器の位置調整冶具を提供する。
【解決手段】電気転てつ機本体に着脱可能で固定スリットが形成された固定スリット部材と、固定スリットに光を通過させる発光素子および受光素子と、を備えるロック狂い検知器の位置調整を行うための電気転てつ機のロック狂い検知器の位置調整冶具21において、電気転てつ機本体に着脱可能な本体部22と、固定スリット部材に着脱可能で本体部22に電気転てつ機の鎖錠カンの移動方向に移動可能に支持された移動部23と、移動部23と連結されて移動部23を鎖錠カンの移動方向に移動させるネジ部24と、を備えている。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
ワークテーブルのピッチエラーの測定方法
【課題】多数の板材を連続的に加工する加工機に好適な回転テーブルの回転角の誤差(ピッチエラー)を測定する方法に関し、ワークの連続加工中においても自動測定できるようにする。
【解決手段】ワークと略同形で、表面に所定角度毎に引いた放射状の計測線と、計測線の放射中心を検出させるマークを表示した測定用基板を用いる。加工機に設けられている搬入誤差検出手段により、テーブル上に搬入された測定用基板の中心の位置偏倚及び角度偏倚を検出し、次にテーブルを所定角度ずつ回動したときのカメラの画像上での各計測線の位置を検出し、先に検出した基板中心の偏差で補正した計測線の方向と、その本来の方向との差から、テーブルのピッチエラーを測定する。
(もっと読む)
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
61 - 80 / 1,900
[ Back to top ]