
Fターム[2F065GG15]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源形態 (1,634) | 点の配列 (783) | 面状 (149)
Fターム[2F065GG15]に分類される特許
21 - 40 / 149
近赤外線吸収性能の面分布測定方法、及び近赤外線吸収フィルタの製造方法
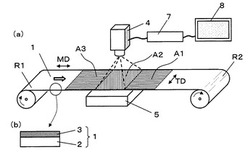
【課題】近赤外線吸収性能の面均一性を容易に測定できる、近赤外線吸収性能の面分布測定方法と、この測定方法を利用した近赤外線吸収フィルタの製造方法を提供する。
【解決手段】透明基材シート2上に近赤外線は吸収し且つ可視光は吸収しない近赤外線吸収層3を積層した帯状の近赤外線吸収フィルタ1に対して、搬送させながら、その幅方向TD及び流れ方向MDに亘る所定領域面A毎に、近赤外線光源5からの透過光の面分布を、近赤外線領域に感度を有する二次元イメージセンサ5による二次元画像として撮影し、画像処理装置7で画像処理して、その輝度分布から近赤外線吸収性能の面分布を測定し、ディスプレイ8に表示する。更に、判定基準に従い面分布の不良品と良品とをマーキング等で識別できる様にすると良い。この方法を用いて、近赤外線吸収フィルタを製造する。
(もっと読む)
部品実装用装置および撮像用の照明装置ならびに照明方法

【課題】多様な認識対象に対応することができるとともに、占有スペースを小さくしてコンパクト化の要請に対応することができる部品実装用装置および部品実装用装置における撮像用の照明装置ならびに照明方法を提供する。
【解決手段】基板3を対象として部品実装用の作業を実行する部品実装用装置において、基板認識カメラ12による撮像時に基板3に対して照明光を照射する際に、光源部13とカラー液晶パネル14を積層して構成され、発光状態を個別に可変な複数の発光部を規則配列した発光パネル15から照明光を照射するに際し、それぞれの発光部から照射される照明光の照射範囲を撮像対象に応じて変化させる。これにより多様な認識対象に対応した適正な照明条件で撮像することができるとともに、照明部20の装置占有スペースを小さくしてコンパクト化の要請に対応することができる。
(もっと読む)
透明板状部材の歪み検出装置
【課題】透明な板状部材でも、モアレパターンが得られる歪み検出装置の提供。
【解決手段】板状の透明な検査対象物16,17を搭載し得る透明な定盤2を有し、定盤の上下に第1及び第2の基準格子ユニット3,5が対称的に配置されており、各基準格子ユニット3,5は、面発光ユニット3a,5a及び該面発光ユニットの発光面3c,5cに配置された面格子3b,5bをそれぞれ有し、第1の基準格子ユニット3と対向する位置に、第1の基準格子ユニット3の面格子3bの検査対象物16,17からの反射像と、第2の基準格子ユニット5の面格子5bの、定盤2及び検査対象物16,17を透過して来た像を重ね合わせた重畳画像データDATを取得する面格子画像取得手段7を設け、該重畳画像データDATに基づいて、モアレ縞が発生しているか否かを判定して検査対象物16,17の歪みや反りの存在を判定する。
(もっと読む)
麺測定器
【目的】種々の麺類の太さを麺に対して非接触状態で計測することができ、且つ麺の太さが合格基準範囲内に収まっているか否かを瞬時に判定することができる麺測定器を提供すること。
【構成】 サンプル麺Mの長さ方向の一端を挟持固定する上部クランプAと、前記麺の他端を挟持固定する下部クランプBと、前記上部クランプAと前記下部クランプBとを結ぶ仮想線Lvに対して交差する光を発するセンサ8と、該センサ8よる麺の太さを数値表示する表示部83とからなること。前記上部クランプAと前記下部クランプBは水平面を同一角度回動自在とすること。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
卵の気室位置検査方法および装置
【課題】卵の気室位置が鈍端中央からどの程度ずれているかといった、ワクチン製造に係る卵へのウイルス接種や卵の漿尿液採取に必要な、精度の高い気室位置の情報を得る。
【解決手段】検査ユニット8aの集光部2を卵5に密着させ、光源11,13から可視光を順次照射する。光源11,13から照射された光の一部は卵5の内部へ入射し、集光部2と卵5が接触する範囲の内側から放射されるので、集光部2と卵5が接触する範囲の内側から放射された光を光電変換部1で受光して受光電圧に変換する。判定演算部は、それぞれの受光電圧の値から気室6の位置の良否を判定する。
(もっと読む)
物体検出装置
【課題】 検出物までの距離、位置を検出する物体検出装置の提供
【解決手段】 投光素子LE(s,t)が検知光を投光しているとする。このときに、受光素子RE(s,t)、受光素子RE(s,t+1)、受光素子RE(s,t+2)、受光素子RE(s,t+3)を、順次、作動させる。例えば、投光素子LE(s,t)が検知光を投光しているときに、受光素子RE(s,t+3)が反射光を受光したとすると、物体が位置c4付近にあると判断できる。投光素子LE(s,t)から投光方向l1に向かって投光された検知光が、位置c4付近に存在する物体によって反射され、その反射光が受光方向r4に向かって進行し、受光素子RE(s,t+3)によって受光されたと考えられるからである。
(もっと読む)
変形測定システム及び変形測定方法
【課題】対象物の3次元的挙動を評価する変形測定システム及び変形測定方法を提供する。
【解決手段】光源(12)と、対象物(11、11A)に配置されると共に光源(12)から出射された光(L1)を反射する反射材(13、13A)と、反射材(13、13A)によって反射された反射光(L2)の光量を測定する光量計(14)と、反射光(L2)の光量の経時変化に基づいて対象物(11、11A)の変形を決定する解析装置(15)を有する。
(もっと読む)
積層支持体及びその変形測定方法
【課題】積層弾性体の変形測定時に変形量の測定が容易な積層支持体と、この積層支持体を用いた変形測定方法を得る。
【解決手段】積層支持体12の積層弾性体16は、金属板18とゴム板20とを張り合わされ、これらの外側端面を周囲から被覆する被覆ゴム22を有する。被覆ゴム22の外周面には、LED26が取り付けられている。積層弾性体16がせん断変形した状態で、LED26を発光させて撮影し、変形量を測定する。
(もっと読む)
撮像装置及び撮像方法
【課題】欠陥検出に適した画像を取得することを目的とする。
【解決手段】被検査物の検査対象領域に照明光を照射し、検査対象領域の基準画像を基準となる基準撮像条件に従って取得し、基準画像をクラスタリング処理して複数のクラスタに分割し、各クラスタが所定の条件に合致するかを判定し、各クラスタが所定の条件に合致しない場合に、所定の条件に合致しないクラスタの撮像条件を変更し、所定の条件に合致しないクラスタの画像を変更された撮像条件に従って取得し、全てのクラスタが所定の条件に合致するまで撮像条件の変更及びクラスタの画像の取得を繰り返し、全てのクラスタが所定の条件に合致すると判定された場合に、所定の条件に合致した各クラスタの画像を合成して検査対象領域の合成画像を取得する。
(もっと読む)
投影照明の画像センサの回転シャッタとの同期
【課題】CMOSセンサーによる撮像時に、投影照明と回転シャッタとの同期を取る。
【解決手段】画像形成装置は照明組立体を有し、照明組立体は、複数の放射源と投影光学系を有し、放射源から視覚野の異なるそれぞれの領域の上へ放射を投影するように構成される。画像形成組立体は、画像センサ上に視覚野の光学的画像を形成するように構成された、画像センサと対物光学系を有し、画像センサは、多重のグループ内に配置されたセンサ要素の1配列を有し、画像センサは、視覚野の電子画像を形成するため、回転シャッタによりトリガーされて、連続するそれぞれの露出期間において、視覚野の異なるそれぞれの区域からの放射を獲得する。制御装置は、照明組立体が視覚野の異なるそれぞれの区域を前記回転シャッタと同期して照明するために、放射源をパルスモードで順次活性化するように接続される。
(もっと読む)
画像情報検出装置
【課題】 構成素子の配置誤差や画像情報検出装置自体の配置誤差に対して、パターンの検出位置精度が鈍感となる画像情報検出装置を提供すること。
【解決手段】 複数の感光ドラムを有するカラー画像形成装置の画像の重なりずれを検出する画像情報検出装置は、四角形の発光面を有する光源と、所定の方向に移動する像担持体と、四角形の受光面を有する受光手段と、前記光源の発光面と前記像担持体を共役関係にし、前記光源から出射された光束を前記像担持体上に形成された重なりずれ検出パターンに照射する照明光学系と、前記像担持体と前記受光手段の受光面を共役関係にし、前記重なりずれ検出パターンにて反射された光束を前記受光手段に導光する受光光学系と、を有し、前記発光面の前記像担持体上における共役像の輪郭を形成する発光面共役像直線部と前記受光面の前記像担持体上における共役像の輪郭を形成する受光面共役像直線部は平行である。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】複数の検出対象物の位置をそれぞれ検出すること。
【解決手段】光学式位置検出装置は、相互に異なる第1の波長域及び第2の波長域に光強度を備えた位置検出光L2を放出する位置検出用光源部140と、第1の波長域の反射率が第2の波長域より高い反射特性を備えた第1検出対象物310と、第2の波長域の反射率が第1の波長域より高い反射特性を備えた第2検出対象物320と、第1の波長域の検出感度が前記第2の波長域より高い感度特性を備え第1の光検出信号を出力する第1光検出部410と、第2の波長域の検出感度が前記第1の波長域より高い感度特性を備え第2の光検出信号を出力する第2光検出部420と、位置検出用光源140を制御して光強度分布を形成するとともに、第1の光検出信号に基づいて第1検出対象物310の位置を検出し、第2の光検出信号に基づいて第2検出対象物320の位置を検出する位置検出部400と、を具備する。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】検出対象物の位置の検出精度の低下を抑制する。
【解決手段】光学式位置検出装置は、物体表面の少なくとも一部で構成される基準面200Pの上方位置に設定された検出空間Sに配置される検出対象物300を光学的に検出するもので、位置検出光L2を出射して検出空間に基準面に沿った位置に応じて変化する光強度分布を形成する位置検出用光源と、検出空間の側方位置に配置され、検出空間で検出対象物により反射された位置検出光を検出する光検出器410と、光検出器の光検出値に基づいて前記検出対象物の位置を検出する位置検出部とを具備する。光検出器は、光検出面411aを備えた検出器本体411と、光検出面の検出空間の側において位置検出光の少なくとも一部を前記光検出面に対して遮光する遮光構造412とを有し、遮光構造は、基準面から出射し直接に光検出面に入射する位置検出光の少なくとも一部を光検出面に対して遮光する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】広い範囲にわたって対象物体の位置を検出することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10において、検出領域10Rに対して一方側には、光強度分布形成用の発光素子12がX軸方向およびY軸方向に配列された光源ユニット120が配置されている。発光素子12から出射された赤外光からなる位置検出光L2は、検出領域10Rに検出光L2の光強度分布を形成するので、対象物体Obによって反射した検出光L3を光検出器30によって検出することができる。それ故、対象物体Obの位置を検出することができる。
(もっと読む)
検査装置および配線回路基板の検査方法
【課題】導体パターンの良否を精度よく検査することのできる検査装置および配線回路基板の検査方法を提供する。
【解決手段】回路付サスペンション基板の金属支持層21および導体パターンに入射する入射光7を発光する発光部2と、入射光7が金属支持層21および導体パターンにおいて反射された反射光11を受光する受光部4とを備え、発光部2および受光部4は、入射光軸13と反射光軸14とが一致するように配置され、発光部2は、入射光軸13と同一直線上にある直線光8と、回路付サスペンション基板に向かうに従って集光され、入射光軸13に対して傾斜する傾斜光9とを含む入射光7を発光する。
(もっと読む)
回転・傾斜計測装置および方法
【課題】物体に簡便で小型な反射センサーを取り付け、回転・傾斜を精密にリモート計測する方法を提供する。
【解決手段】リモート観測方向に設置固定された偏光検知器と、物体に取り付ける反射センサーと、該反射センサーに円偏光を照射する光源装置から成り、且つ、該円偏光の照射角度範囲の設定によって、該反射センサーで所定の範囲の入射角度分布で正反射せしめ、その正反射せしめることで、該正反射光束を偏光反射の既知の入射角依存性に従う所定の空間分布の発散する楕円偏光光束を成さしめ、その楕円偏光光束を検出して、リモート観測方向へ向かう光線成分の偏光楕円から該反射センサーのリモート観測光軸周りの回転角θと観測光軸と成す傾斜角φを計測する。
(もっと読む)
撮像方法、画像処理方法および撮像・画像処理装置
【課題】光沢のあり照明光を正反射する被撮像面の正常状態維持領域と加工又は劣化等により非正常状態になった領域を区別することを、手間をかけないで安定的に、所定の精度で、短時間に、低いコストで、且つ自動的に得る方法を提供する。
【解決手段】
カメラの光軸が被撮像面に垂直な方向に対して所定の角度の傾斜を持つようにカメラを配置し、且つカメラの所定の画素範囲に対応する被撮像面上の範囲(撮像範囲)からカメラのレンズの有効径内に入る反射光の内、撮像範囲で正反射された照明光が正反射前に通過するべきトンネル空間(入射光トンネル空間)が照明装置の発光面を貫通するように照明装置を配置し、光沢があり照明光を正反射する被撮像面を撮像する。
(もっと読む)
位置検出機能付き表示装置
【課題】少ない数の光検出器や位置検出用光源によって、検出領域内の対象物体の位置を検出することのできる位置検出機能付き表示装置を提供すること。
【解決手段】位置検出機能付き表示装置100において、表示パネル8は、画像表示領域20Rに、複数の表示用発光素子6を備えている。また、画像表示領域20Rには、検出領域10Rに位置検出光L2を出射する複数の位置検出用光源12が配置されている。従って、複数の位置検出用光源12の発光バランスを調整すれば、検出領域10Rに位置検出光L2の強度分布を形成することができる。従って、検出領域10R内の対象物体Obで反射した位置検出光L2を光検出器30によって検出すると、その検出結果に基づいて、対象物体Obの位置を検出することができる。
(もっと読む)
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。 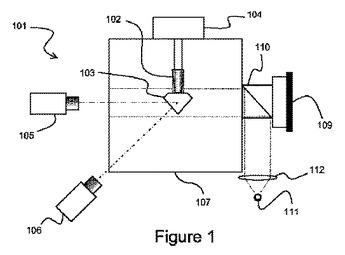 (もっと読む)
(もっと読む)
21 - 40 / 149
[ Back to top ]