
Fターム[2F065JJ09]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894) | 被測定物に対し垂直 (1,561)
Fターム[2F065JJ09]に分類される特許
81 - 100 / 1,561
露光装置、露光方法、及び表示用パネル基板の製造方法
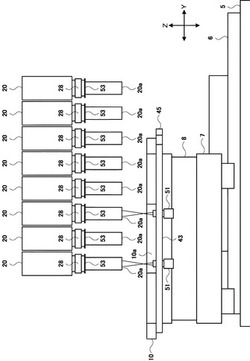
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
変位検出装置

【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
3次元計測装置
【課題】位相シフト法による3次元計測を可能にしながらも、液晶シャッタにおける隣接する画素の透過率を連続的に変化させる場合に比べて応答時間を短縮する。
【解決手段】投影装置1は、光源11と、処理装置3からの制御信号により透過率が個別に制御される画素が2次元格子上に配列された液晶シャッタ12と、光源11から出力され液晶シャッタ12を透過した光束の少なくとも一部を混合して計測対象4の表面に照射させるレンズ13とを備える。処理装置3は、液晶シャッタ12にそれぞれ複数列の画素からなり平均透過率が周期的に変化する複数の帯領域を形成させるように制御信号を出力し、レンズ13は、帯領域を透過した光束を混合して計測対象4の表面に縞状の光パターンを形成させる。
(もっと読む)
光学素子、光学素子を備えた顕微鏡装置ならびに光学素子の組み立て方法
【課題】液晶光学素子の光軸を対物レンズの光軸に位置合わせできる光学素子を提供する。
【解決手段】光学素子(103、10)は、対物レンズ(104)よりも光源(101)側に配置され、液晶分子が含まれる液晶層と、その液晶層を挟んで対向するように配置された二つの第1の透明電極とを有し、その液晶層を透過する光源から発した所定の波長を持つ直線偏光の位相または偏光面を、二つの第1の透明電極の間にその所定の波長に応じた電圧を印加することにより制御する液晶光学素子(3、12、13)と、液晶光学素子(3、12、13)の光軸を対物レンズ(104)の光軸と位置合わせ可能なように液晶光学素子(3、12、13)を対物レンズ(104)に対して相対的に移動可能な光軸調整機構(4、14)とを有する。
(もっと読む)
ロック狂い検出装置
【課題】鎖錠桿に塗布されたグリースの一部が移動スリット保持体、または固定スリット保持体のスリットを塞いでしまうことによる誤検出を防止し得るロック狂い検出装置を提供する。
【解決手段】ロック狂い検出装置1は、転てつ機2の鎖錠桿4a,4bが出入りする鎖錠桿案内部と、鎖錠桿4a,4bに取り付けられた移動スリット保持体とともにロック狂いの検出に用いられる固定スリット保持体の間に、特徴的なパッキン部が設けられている。パッキン部の先端は、鎖錠桿4a,4bの進入ごとに鎖錠桿4a,4bの表面を擦るため、鎖錠桿4a,4bの表面に塗布されたグリースなどの潤滑剤は、パッキン部に遮られて、固定スリット保持体または移動スリット保持体が設けられた領域へ侵入することがない。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
計測対象の3次元表面形状算出方法及び3次元表面形状計測装置
【課題】
位相シフト方法による計測対象の3次元形状の計測では、少なくも3種類以上の位相を変えた縞パターンの投影が必要であり、縞パターンの切替、撮像の時間等の計測に時間が掛る課題がある。
【解決手段】
分離可能な異なる2色と各々位相の異なる4種類の縞パターンの2つから合成した異なる2種類の合成縞パターンを計測対象にカラー投影して撮影したカラー画像の色分離を行って撮像画像の縞パターンの位相を算出して計測対象の3次元表面形状の計測を行う。
(もっと読む)
構造の電磁散乱特性を計算し、近似構造を再構築する方法及び装置
【課題】回折格子の輪郭を再構築するCSIアルゴリズムを開示する。
【解決手段】電流密度Jの体積積分式を解くには、Jの近似解を求めるように、E及びJの連続成分を選択することにより、電場ES及び電流密度Jに関連するベクトル場FSの暗示的構築を使用し、Fは1つ又は複数の材料境界にて連続している。Fは、少なくとも1つの方向x、yに関して少なくとも1つの有限フーリエ級数で表され、体積積分式を数値的に解くステップは、Fの畳み込みによってJの成分を決定することを含み、畳み込み演算子Mは、両方向の材料及び幾何構造の特性を含む。Jは、両方向に関して少なくとも1つの有限フーリエ級数で表すことができる。連続成分は、E及びJに作用する畳み込み演算子PT及びPNを使用して抽出することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
落射照明画像用のエッジ位置測定値補正
【課題】 落射照明画像用のエッジ位置測定値補正を提供する。
【解決手段】 精密マシンビジョン検査システムにおける落射照明画像エッジ位置誤差を補正するための方法が開示される。方法には、落射照明光および透過照明光を用いてワークエッジ特徴のエッジ位置測定値を比較することが含まれる。透過照明光を用いたエッジ位置測定値は、落射照明より不確実性が低い。位置補正係数が、2つのエッジ位置測定値間の差から決定され得る。位置補正係数は、落射照明光を用いて取得された画像に基づく後続のエッジ位置測定値を補正するために記憶してもよい。いくつかの実施形態において、位置補正係数は、複数のエッジ用のエッジ位置測定値の比較に基づいて決定してもよい。
(もっと読む)
計測装置
【課題】被加工物の研削時におけるノイズ信号による誤判定を防止し、被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の上面で反射した反射光と光路長が一定の基準反射光に基づいて被加工物の厚み方向における上面までの2点間の距離を計測する計測装置であって、被加工物の上面で反射した反射光と光路長が一定の基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準反射光の光路長との光路長差に対応して出力される信号強度における現在出力された値と前に出力された値との絶対値の差を求め、この絶対値の差を各光路長差毎の信号強度における現在出力された値に加算し、加算された値が最も高い光路長差を被加工物の厚み方向における上面までの2点間の距離として決定する。
(もっと読む)
欠陥検出方法及び欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいて、構造パターンの外周形状であるエッジを検出し、ライン検出工程により、エッジの最外周画素の集合であるラインを検出し、構造ライン取得工程によりエッジが境界となる複数の構造パターンに対してそれぞれに接するラインである構造ラインを取得し、エッジ幅取得工程により2つの異なる構造ライン間の距離をエッジ幅として取得し、平均エッジ幅算出工程により同じ構造ライン上の任意の2点を始点及び終点として設定し、始点から終点までの平均エッジ幅を取得する。そして、欠陥検出工程により、平均エッジ幅とエッジ幅とを比較し欠陥を検出する。
(もっと読む)
トロリ線の摩耗状態監視装置
【課題】トロリ線とパンタグラフが離れたときに発生するアークを検知し、このときのトロリ線の下面、すなわち摩耗面を閲覧することができるトロリ線の摩耗状態監視装置を提供する。
【解決手段】トロリ線の摩耗状態監視装置において、車両10の屋根10a上にパンタグラフ11に向けて設置されパンタグラフ11を監視するエリアカメラ1と、前記車両10の屋根10a上に鉛直上向きに設置されトロリ線13の下面を撮影するラインセンサカメラ2と、前記エリアカメラ1及び前記ラインセンサカメラ2により撮影した画像を入力及び録画し、前記パンタグラフ11からアークが発生したときの前記ラインセンサカメラ2により撮影した画像を閲覧することができる画像処理装置3とを備えることとした。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
マスク検査方法およびその装置
【課題】検査時間および労力を低減できるマスク検査方法およびその装置を提供する。
【解決手段】実施形態によれば、マスク検査方法は、半導体露光用マスクに任意波長の光を入射させ撮像部にて像を取得する光学系を用いて、前記マスクの欠陥の有無を検査する方法であって、予め前記光学系による点像を、前記撮像部の読み出し方向に伸長される制御条件を取得する第1ステップ(S203)と、前記制御条件により、マスクの所望の領域の像を取得する第2ステップ(S205)と、取得した前記所望の領域の像において、信号強度が予め定めておいた第1閾値以上であり、前記信号強度の前記読み出し方向における差分が予め定めておいた第2閾値以下であるピーク信号が存在する場合、前記ピーク信号の座標を欠陥として判定する第3ステップ(S206)とを具備する。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
三次元形状計測装置、および三次元形状計測方法
【課題】正確に半田の高さを算出することができる三次元形状計測装置を提供することである。
【解決手段】半田塗布前の検査ブロックにおいて、配線パターンの近似面を作成する(S22)。また、半田塗布前の検査ブロックにおいて、ランドの近似面を作成する(S23)。そして、作成した配線パターンの近似面Srとランドの近似面Slとに基づいて、オフセット、すなわち、配線パターンの近似面Srとランドの近似面Slとの距離を算出する(S24)。そして、算出したオフセットをRAM等に記録する(S25)。そして、半田塗布後に、記憶したオフセットを読み出して、半田の高さを計算する。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
81 - 100 / 1,561
[ Back to top ]