
Fターム[2F065NN20]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 測定器以外の (526)
Fターム[2F065NN20]に分類される特許
61 - 80 / 526
三次元形状計測装置、部品移載装置および三次元形状計測方法
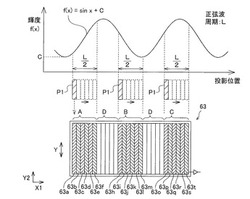
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
インプリント装置、そのモールド及び物品の製造方法

【課題】 ショット領域間の相対位置の計測を容易に行いうるインプリント装置を提供する。
【解決手段】 インプリント装置は、基準マークが形成されたモールドを保持する支持体と、各ショット領域に第1マーク及び第2マークが形成された基板を保持する基板ステージと、前記各ショット領域に形成された前記第1マーク及び前記第2マークと前記モールドに形成された前記基準マークとを検出することによって前記各ショット領域間の相対位置を計測する検出器とを備える。前記検出器は、隣接しあう2つのショット領域のそれぞれに形成された隣接しあう前記第1マーク及び前記第2マークそれぞれの前記基準マークに対する位置を検出することによって、隣接しあう前記2つのショット領域間の相対位置を検出する。
(もっと読む)
絶対位置測定装置及び絶対位置測定方法
【課題】移動体の絶対位置を高い精度で求めること。
【解決手段】絶対位置測定装置は、移動体2に形成された2つの減圧空間部3,23に個々に収容されて、中心波長が単一の光源を用いて移動体に光を照射して干渉信号を得る2つの干渉計6,25と、2つの減圧空間部の少なくとも一方を減圧して、2つの減圧空間部を互いに異なる圧力にする真空ポンプ4及び真空排気流路5,24と、2つの干渉計より得られる干渉信号の位相を検出する2つの位相検出器17,35と、2つの位相検出器で検出される位相を比較する位相比較器19と、位相比較器19における位相比較結果に応じて原点を設定する原点信号発生器21と、原点信号発生器21で設定される原点を基準として移動体の絶対位置を求める絶対位置算出器22,37とを備えている。
(もっと読む)
ステージ装置、露光装置及びデバイスの製造方法
【課題】テーブルの位置決めに有利なステージ装置を提供する。
【解決手段】ベース部と、XY平面に沿って移動可能なテーブルと、Y軸方向に沿った前記第1の端面の位置を計測する第1のY軸干渉計222と、前記Y軸方向に沿った第2の計測光路を有する第2の端面の位置を計測する第2のY軸干渉計224と、前記第1のY軸干渉計及び前記第2のY軸干渉計から前記XYZ座標系のX軸方向に離間して、且つ、前記Y軸方向に沿った第3の計測光路を有する第3のY軸干渉計228と、前記第1のY軸干渉計の計測値、前記第2のY軸干渉計の計測値及び前記第3のY軸干渉計の計測値に基づいて前記テーブルの変形量を求め、前記変形量に基づいて目標位置を補正した補正目標位置を求め、前記第1のY軸干渉計の計測値と前記第2のY軸干渉計の計測値から求まる前記テーブルの位置が前記補正目標位置に位置するように前記テーブルを位置決めする制御部とを有する。
(もっと読む)
シート材の方向検出方法及び装置、並びにシート材の切断方法、欠陥検査方法及びプリント方法
【課題】シート材に形成されたレンチキュラレンズの傾き方向と角度とを検出する。
【課題を解決するための手段】多数のレンズ14が表面に形成されたウエブ11に対して、その垂直方向から幅広にしたスポット光SPを照射する。ウエブ11から下方に離れ、またスポット光SPの光軸SPLから搬送幅方向に離してラインセンサ22を配置してある。このラインセンサ22により、搬送幅方向に対する屈折光TPのずれを直線方向のずれとして検出する。この検出結果に基づいて、スポット光SPの光軸回りに回転した屈折光TPの傾き方向,角度θを判定部23によって特定し、その特定した傾き方向,角度θをレンズの傾き方向,角度θとする。
(もっと読む)
ワークの位置合わせ方法及びその装置
【課題】 簡易な構成で、二つのワークの位置合わせを行うことができるワークの位置合わせ方法を提供する。
【解決手段】 二つのワークの姿勢を平行な状態に保ちながらワークの位置合わせをする方法であって、第1ワーク1の締付穴10,11を1台のカメラ3で撮像して記憶する第1工程と、第2ワーク2の締付穴12,13をカメラ3で撮像して認識する第2工程と、カメラ3の視野中心点15と第1ワーク1の締付穴10,11の中心10a,11aを通る直線16,17上に第2ワーク2の締付穴12,13の中心12a,13aが位置するよう第2ワーク2を移動させる第3工程と、直線16,17上に第2ワーク2の締付穴12,13の中心12a,13aが位置する状態で、第2ワーク2を移動させて第1ワーク1の締付穴10,11に第2ワーク2の締付穴12,13を接近させる第4工程を備えた。
(もっと読む)
検出装置
【課題】合焦精度の低下を軽減する。
【解決手段】ラインピクセルにより受光される光量データが飽和したとき、ラインピクセルの略中央のピクセルである合焦ピクセルを過ぎたときの前後2ピークのピークピクセルを決定し(S11)、決定したピークピクセルにおけるZ軸カウンタ値を取得し(S12)、取得したZ軸カウンタ値を直線補間して、合焦ピクセルにおけるZ軸カウンタ値を推定し(S13)、推定された合焦ピクセルにおけるZ軸カウンタ値に基づいて、対象物2の面位置を検出する(S14)ので、受光される光量が飽和したときでも、合焦精度の低下を軽減することができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
ラインセンサカメラの角度調整装置
【課題】2軸の角度調整の操作性と小型化とをバランス良く達成することができる。
【解決手段】基準プレート11と、CCD素子面において走査方向に直交する方向の中心を通る走査方向の第1軸線O1を中心にして回転するあおり調整用プレート20と、あおり調整用プレート20上に搭載され、このあおり調整用プレート20を回転させるためのあおり調整機構21と、CCD素子面に対する法線方向に平行な第2軸線O2を中心にして回転する回転調整用プレート30と、回転調整用プレート30上に搭載されるとともに、この回転調整用プレート30を回転させるための回転調整機構31とを備え、あおり調整用プレート20がカメラ本体5に固定され、回転調整用プレート30に対して回転可能に支持され、回転調整用プレート30が基準プレート11に固定され、各プレート11、20、30がその順で重なって配置された角度調整装置10を提供する。
(もっと読む)
カラー画像位置検出装置及びそれを備えたカラー画像形成装置
【課題】小型で適正なカラー画像の位置検出ができるカラー画像位置検出装置を提供する。
【解決手段】用紙12上の直交方向画像補正パターン10と斜め方向画像補正パターン11を検出するカラー画像位置検出装置であって、1つの共用緑色光源3と、それを中間にして一方側に設けられた第1の赤色光源2aと、他方側に設けられた第1の青色光源4aを用紙12の搬送方向に対して直交する方向に配置した第1の検出グループ36と、共用緑色光源3を中間にして一方側に設けられた第2の赤色光源2bと、他方側に設けられて第2の青色光源4bを用紙12の搬送方向に対して斜め方向に配置した第2の検出グループ39と、各光源からの反射光を受光する受光素子5a,5bとを1つの光源ホルダ1に設置したことを特徴とする。
(もっと読む)
3次元複合機および3次元複製方法
【課題】立体物の複製を家庭やオフィス等で手軽に実現しする3次元複合機を提供する。
【解決手段】処理用空間としてのチャンバーと、3次元モデルデータに基づいて上記チャンバー内に立体物を造形可能な造形部30と、上記チャンバー内に載置された測定対象物を3次元測定して3次元モデルデータを取得可能な測定部20と、上記測定部20により取得された3次元モデルデータに基づいて上記造形部30に上記測定対象物の複製物を造形させる造形制御部とを備える3次元複合機10とした。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
加工位置の計測方法
【課題】第mの加工位置と第nの加工位置とのずれを精度よく計測することのできる加工位置の計測方法の提供を目的とする。
【解決手段】加工位置の計測方法は、第mの加工を施すとともに、第mのマーク26、及び、基準寸法を示す基準マーク29を形成し(S2)、第nの加工を施すとともに、第nのマーク27を形成し(S7)と、第mのマーク26及び第nのマーク27の相対的位置を測定するとともに、測定した基準寸法L1と基準寸法L0との比にもとづいて、第mのマーク26と第nのマーク27との相対的位置を補正し、第mの加工位置と第nの加工位置との加工位置のずれを計測する(S9)方法としてある。
(もっと読む)
印刷はんだ検査装置および印刷はんだ検査方法
【課題】プリント板上の測定しようとするはんだ箇所に対し、高さの基準となる基準面を設定し、その基準面に対するはんだの高さを求めるときに、部品実装後のプリント板を分割するために加工された分割用加工部の影響を受けないようにする技術を提供する。
【解決手段】変位センサがはんだが印刷されたプリント板を光学的に計測し、このプリント板の高さの変位を示す変位情報を出力し、分割ライン決定部がプリント板を分割するための分割用加工部を変位情報に基づき検出し、プリント板の分割ラインを分割ライン情報として出力する。基準面算出領域設定手段は、分割ライン情報を受け分割ラインの内側の領域内に基準面算出領域を設定し、基準面算出手段が基準面算出領域内の変位情報に基づいて、基準面算出領域に形成される平面を基準面として設定する。変位測定部は、はんだ箇所のはんだの高さを、はんだ箇所の変位情報と設定された基準面とから算出する。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
撮像式工具測定装置および測定方法
【課題】撮像環境の変化を検出し、工具寸法を高精度に測定できるように撮像条件を自動的に調整したり、画像を補正するようにした、撮像式工具測定装置および撮像式工具測定方法を提供する。
【解決手段】撮像部12からの工具像にかかる信号、または画像前処理部20からの処理信号に基づいて撮像環境・条件を検出する撮像環境・条件検出部25と、撮像環境・条件検出部25の検出情報を基に、撮像の適正条件を判断し、調整指令を導出する撮像条件判断・調整指令部27と、前記撮像条件判断・調整指令部27からの調整指令信号により、撮像条件を調整する調整手段と、を具備する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】複数の視差候補の中から最適な視差を精度よく選択することができる画像処理装置等を提供する。
【解決手段】画像取得部11は、同一被写体について視差のある2つの画像を取得する。特徴点候補取得部12は、画像取得部11により取得された一方の画像から特徴点候補を取得する。視差候補取得部13は、ステレオマッチングを行い、他方の画像から特徴点候補毎の視差候補をそれぞれ取得する。特徴点選択部14は、取得された特徴点候補の中から所定の条件を満たすものを特徴点として選択する。隣接点取得部15は、特徴点選択部14により選択された特徴点に隣接する隣接点を、特徴点毎にそれぞれ取得する。視差決定部16は、特徴点と、視差候補と、隣接点と、に基づいて、確率伝搬法によるアルゴリズムを用いた処理を実行し、各特徴点に対応する視差を決定する。
(もっと読む)
マスク欠陥検査装置およびマスク欠陥検査方法
【目的】マスク面上のパターン領域と非パターン領域の間に段差があるマスクであっても、効率的に検査可能なマスク欠陥検査装置およびこれを用いたマスク欠陥検査方法を提供する。
【構成】マスク面に対するフォーカス合わせを行うフォーカス合わせ機構と、パターン画像の取り込み時の検査視野走査方向上の検査視野を挟む第1箇所と第2箇所のマスク面におけるフォーカスを、それぞれ検出する第1のフォーカス検出部および第2のフォーカス検出部と、第1および第2の箇所が、パターン領域と非パターン領域とのいずれに位置するかを判定する判定部と、判定部の判定結果に基づき、フォーカス合わせ機構に対しフォーカス合わせ方法を指示するフォーカス合わせ方法指示部と、を有することを特徴とするマスク欠陥検査装置およびこれを用いたマスク欠陥検査方法。
(もっと読む)
61 - 80 / 526
[ Back to top ]