
Fターム[2F065NN20]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 測定器以外の (526)
Fターム[2F065NN20]に分類される特許
81 - 100 / 526
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
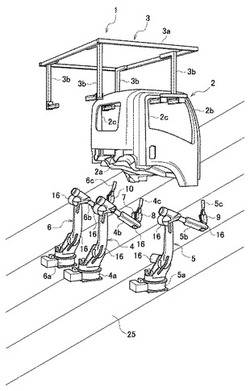
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
車載機器制御装置

【課題】ユーザの視線によってスイッチを選択する車載機器制御装置において、車両前方を見ることが疎かになることなく、ユーザが所望するスイッチを精度よく選択できるようにすること。
【解決手段】HUDによって車両2のフロントウィンドウ41のスイッチ表示領域60に複数のスイッチ61〜64を表示させる。運転者が車両前方を注視していときに視線が通常位置する領域として、フロントウィンドウ41の一部の領域と重複する形で視線監視領域50を定める。カメラ4によって撮像された運転者の眼球の画像に基づいて、運転者の視線が視線監視領域50から外れたか否かを判断する。外れた場合には運転者の視線の動きを追跡し、複数のスイッチ61〜64のうち、視線が最も長く停留したスイッチ、視線が最後に通過したスイッチ又は視線の進行方向にあるスイッチを、運転者が所望するスイッチとして決定する。
(もっと読む)
記録媒体浮き検出装置及びインクジェット記録装置
【課題】記録媒体浮き検出の誤動作を防ぐことができる記録媒体浮き検出装置及びインクジェット記録装置を提供する。
【解決手段】検出ビームを出射、受光するための投光ユニット、受光ユニットを有する投光受光手段と、前記検出ビームの光路を平行移動させるための投光用平行平板と、を備え、前記投光用平行平板は、互いに平行な入射面と、出射面とを有する平板であり、前記検出ビームに垂直な回転軸を中心に回動することにより、前記入射面から入射した前記検出ビームを屈折させて前記出射面から前記検出ビームの光路を前記搬送面から離れる方向に平行移動させて出射するように構成され、所定のタイミングで、前記検出ビームを前記搬送面から離れる方向に平行移動させる記録媒体浮き検出装置。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
走行状態判定装置
【課題】車両に搭載されたカメラの撮影画像を処理してピッチ角からその車両の走行状態や路面状態を判定する走行状態判定装置において、ピッチ角を、簡単にかつ、実際との乖離なく正確に推定できるようにして判定性能を向上する。
【解決手段】車両1に搭載されたカメラ2の撮影画像を、射影変換部32によってカメラ視点を変える簡単な座標変換の処理で迅速に側面視画像に射影変換し、ピッチ角推定部4により即面視画像の時間変化から車両1のピッチ角を実際との乖離を防止して正確に推定推定する。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
視点位置算出装置
【課題】 運転者の視点位置の算出に係る信頼性の向上を図る。
【解決手段】本発明は、運転者の視点位置EPを算出する視点位置算出装置1であって、右サイドミラーRの角度と車両の運転席着座中心面Tとに基づいて第1の推定視点位置EPRSを算出する第1推定視点位置算出部12と、左サイドミラーLの角度と車両の運転席着座中心面Tとに基づいて第2の推定視点位置EPLSを算出する第2推定視点位置算出部13と、推定視点位置EPRS,EPRSが一致するか否かを判定する一致条件判定部15と、推定視点位置EPRS,EPRSが一致すると判定された場合、当該推定視点位置を運転者の視点位置EPとして算出する視点位置算出部16とを備え、視点位置算出部16は、各推定視点位置EPRS,EPRSが一致しないと判定された場合、推定視点位置EPRS,EPLSに基づいて視点位置EPを算出する。
(もっと読む)
刃先の検査装置
【課題】チップコンデンサやチップ抵抗、二次電池内部の積層電極用アルミニウム箔の製造等に用いて好適な切断装置の刃物の刃先の検査装置を提供する。
【解決手段】光源20からの光を直立して配されている刃物の側面の第1の研削面11、第2の研削面12、第3の研削面13を横切るように照射しながら移動させる。そして上記刃物に対して側方において、光軸が水平な状態で配されたCCDカメラ22によって各研削面11、12、13からの反射光を検出し、そのピークから反射面の数を、ピークの幅から各研削面の幅を、またピークが現れる角度から研削面の角度をそれぞれ検出する。またCCDカメラ22に取込まれた画像によって、各研削面の表面性状を観察する。
(もっと読む)
画像検査方法および画像検査装置
【課題】所定の繰り返しピッチで連続して生産される部品の画像検査において,その画像検査の実施状態を知ることが可能となる技術を提供する。
【解決手段】画像検査装置10において,マッチング処理部141は,入力された検査画像のフレームから部品を検出し,検出された部品の位置と相関値とを取得する。フレーム間部品対応検出部151は,連続する2つのフレーム間で類似する部品の対応を検出する。対応部品位置差分算出部152は,対応部品間の検出位置の差分である対応部品位置差分を算出する。対応部品位置差分統計部153は,対応部品位置差分を統計した移動量ヒストグラムを作成する。部品移動量推定部155は,移動量ヒストグラムから連続するフレーム間での部品の移動量を推定する。画像検査実施状態判定部150は,部品の移動量の推定結果から,画像検査が適切に実施されているか否かを判定する。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
出力制御装置
【構成】空調装置D_1〜D_6は、部屋RM1の天井HV1に設けられ、部屋RM1に向けて出力を発生する。部屋RM1にはまた、空調装置D_1〜D_6にそれぞれ対応する複数の分割エリアが割り当てられる。CPUは、部屋RM1に存在する1または2以上の人物にそれぞれ対応する1または2以上の代表点を検出し、検出された1または2以上の代表点の各々から分割エリアの境界までの距離を測定し、そして測定結果に基づいて空調装置D_1〜D_6の出力動作を制御する。
【効果】部屋RM1に向けた適応的な出力制御の精度が向上する。
(もっと読む)
基板検査装置および基板検査方法
【課題】検査完了までに要する時間の増加を抑制しつつ詳細な欠陥レビュー検査を可能にする。
【解決手段】基板検査装置1は、基板WをX方向へ搬送する基板搬送ユニット22と、X方向へ搬送中の基板Wにおける欠陥を検出するラインスキャンカメラ15、ラインスキャンカメラ駆動部115、欠陥検出部121および制御部101と、検出された欠陥の画像を同搬送中に取得するレビューカメラ19、レビューカメラ駆動部119および制御部101と、を備える。
(もっと読む)
工具長測定方法及び工具長測定装置
【課題】 スキップ信号が読み込まれない場合であっても、工具の移動を確実に停止させることができる工具長測定方法及び工具測定装置を提供する。
【解決手段】 工具を4所定位置から所定方向に移動させて、前記工具4によりレーザー光6を遮光したときの、前記工具4の前記所定位置からの移動量に基づいて前記工具の長さを測定する工具長測定方法において、前記工具4がレーザー光6を遮光していることを示すスターティック信号Bが検知されたとき、前記工具4のレーザー装置本体5へ接近する方向への移動を停止する。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
外観検査装置
【課題】観察者の検査にかかる自由度を向上させることができる外観検査装置を提供すること。
【解決手段】観察対象の基板Wを保持する基板ホルダ21を有する基板保持装置2と、基板ホルダ21の移動方向および移動量を操作するコントローラ3とを備えた外観検査装置1であって、コントローラ3は、互いに直交する3つの軸からなり、コントローラに固定された第1座標系に対する並進または回転に基づいて定められ、基板ホルダ21が並進または回転を行なう移動方向と、基板ホルダ21の移動方向における移動量とを含む信号を基板保持装置2に送信する信号送信部34を備え、基板保持装置2は、信号送信部34によって送信された信号を受信する第1信号受信24部と、第1信号受信部24が受信した信号をもとに、互いに直交する3つの軸からなる第2座標系を基準として基板ホルダ21を駆動制御する制御部と、を備えた。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
二次元測定機
【課題】電力消費量が少なく高熱の発生を伴わずに太陽光に近い白色光で被測定物を照明できる照明手段を備えた二次元測定機を提供する。
【解決手段】
テーブル12に載置した被測定物Wに対して垂直を保持したままX−Y方向に自在に移動する顕微鏡一体型CCDカメラ30と、顕微鏡光学系と同軸状の被測定物照明手段と、を備えた二次元測定機で、前記照明手段を、顕微鏡20の鏡筒21内のハーフミラー24と、ハーフミラー24に対応する鏡筒21側方延長位置に配置したクロスプリズム54と、該クロスプリズム54を取囲んで配置した赤,青,緑の単色LED52R,G,Bで構成し、単色LED52R,G,Bの発光がクロスプリズム54で合成されてハーフミラー24に導かれる。単色LED52R,G,Bの同時点灯で、太陽光に近い十分な光量の白色照明光が得られ、モニタ画面に映し出されるカラー画像が非常に見易い。照明用光源の電力消費量,発熱量が小さく、省エネルギー対策にも合致する。
(もっと読む)
トナー量計測装置及び画像形成装置
【課題】中間転写ベルト等の像担持体上に形成されたトナーパッチ等のトナー像のトナー量を精度よくしかも安定して検知する。
【解決手段】トナー量計測装置は中間転写ベルト7に向けて光を照射する発光素子16aと、中間転写ベルト7上のトナー像で反射された反射光を受光する受光素子16bとを有している。トナー量計測装置は反射光の光量に応じてトナー像のトナー量を算出する。発光素子16aと中間転写ベルト7上における光の照射位置とを結ぶ直線と、照射位置と受光素子16bとを結ぶ直線とのなす角度が15度以内となるように、受光素子16bが配置されている。
(もっと読む)
シートに塗工された塗工パターンの形状測定方法及び装置
【課題】塗工パターンの幅方向および搬送方向の測定の同時性を実現し、光軸方向の距離変動の影響も無くすことができる塗工パターンの測定方法及び装置を提供する。
【解決手段】 シートに塗工された塗工パターンの形状測定方法において、
1)シートの搬送方向に直交して水平ラインの撮影方向に複数のカメラを並べ、前記シートを前記複数のカメラで撮影する工程、
2)撮影した映像の水平走査信号または垂直走査信号の少なくとも一方を水平走査に同期させ前記複数のカメラの水平走査信号を順次切り替えて画像処理手段に取り込む工程を含んでいる。
(もっと読む)
不要ワニスの検査装置及び検査方法
【課題】ステータコアに付着した不要ワニスを容易かつ正確に検知することができる不要ワニス検査装置を提供すること。
【解決手段】ステータコア80に設けたコイル7に電気的絶縁性を維持するためのワニス9を含浸させてなるステータ8における、ステータコア80の表面に付着した不要ワニス99を検知する装置であって、不要ワニス99を励起発光させることが可能な検査光50を、ステータコア80の表面の検査領域に向けて照射する光源5と、ステータコア80の表面の検査領域を撮影するためのカメラ6と、カメラ6を通して採取した画像データを解析して不要ワニス99の付着位置を特定する判定手段45と、検査光50がステータコア80の軸方向端面81から突出したコイルエンド部70に照射されることを防止するためにコイルエンド部70の少なくとも一部を覆うマスク部3とを有する。検査光50は紫外線であることが好ましい。
(もっと読む)
81 - 100 / 526
[ Back to top ]