
Fターム[2F065NN20]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 測定器以外の (526)
Fターム[2F065NN20]に分類される特許
41 - 60 / 526
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
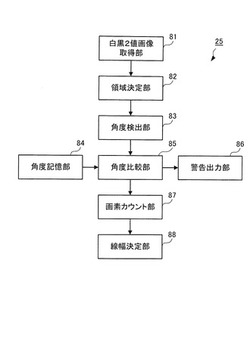
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム

【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
偏芯回転センサならびに溶接トーチ揺動検出器および揺動装置
【課題】 電磁ノイズ等の外乱要因の影響を低減。電磁ノイズ等の外乱要因が大きく影響する作業環境下でも、誤動作なく溶接トーチを揺動駆動する。
【解決手段】 偏芯カム6を間にして相対向し該偏芯カムの周面に摺接する第1および第2のばね板2a,3a;各ばね板に固定されて各ばね板の偏芯カム回転対応の屈伸による張力に対応した波長の光を反射する第1および第2のFBG光ファイバ4a,5a;第1のFBG光ファイバ4aにレーザ光を送出し該FBG光ファイバ4aからの反射光を出力する第1の光カプラ8;および、第2のFBG光ファイバ5aにレーザ光を送出し該FBG光ファイバ5aからの反射光を出力する第2の光カプラ9);を備える。さらに、第1および第2の光カプラ8,9が出力する光相当の偏芯回転電気信号を発生する電気回路手段11〜13;を備える。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
半導体装置の製造方法および半導体装置
【課題】下層および上層に形成したデバイスパターン間のズレ量を現状で実施されている方法よりも高精度に計測可能な半導体装置の製造方法および半導体装置を提供すること。
【解決手段】実施形態によれば、半導体装置の製造方法が提供される。半導体装置の製造方法は、パターン形成工程と、開口部形成工程とを含む。パターン形成工程では、第1層に位置ズレ計測用のパターン111と第1パターン101とを形成する。開口部形成工程では、前記第1層よりも上層に積層した第2層103に前記位置ズレ計測用のパターン111を露出させる開口部と第2パターン102とを形成する。
(もっと読む)
ラベル作成用処理プログラム及びラベル作成処理方法
【課題】ラベルのサイズを自動的に決定することで操作負担を低減し、操作者の利便性を向上する。
【解決手段】操作端末10の制御回路102は、対象物Fの実寸法Bを決定する基準となる基準物Kの実寸法Aを取得し、タッチパネル112に表示される基準物Kの表示寸法A′と貼り付け領域Zの表示寸法B′との寸法比A′/B′を取得し、取得された基準物Kの実寸法Aと寸法比A′/B′とを用いて、貼り付け領域Zの実寸法Bを算出し、算出された貼り付け領域Zの実寸法Bに基づき、対象物Fに貼り付けるラベルLのサイズを設定するための、ラベル作成用処理プログラムを実行する。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
分光特性測定装置、その制御方法、及び分光特性測定方法、並びに分光特性測定装置の光路長差伸縮機構
【課題】外乱による信頼性の低下を抑えた分光特性測定装置とその制御方法、分光特性測定方法、及び光路長差伸縮機構を提供する。
【解決手段】本発明は、被測定物の測定点から多様な方向に向かって発せられた光を一つにまとめた後、分割光学系によって第1反射部と第2反射部に導き、前記第1反射部と前記第2反射部の相対位置に影響を及ぼす外乱を推定し、該外乱を解消するように前記第1反射部と前記第2反射部の少なくとも一方を移動させることにより前記第1反射部によって反射された第1反射光と前記第2反射部によって反射された第2反射光の光路長差を伸縮させつつ、前記第1反射光と前記第2反射光を結像光学系によって同一点に導き、その点の干渉光強度変化に基づき前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
基板処理装置および基板処理の終了時点を検出する方法
【課題】基板表面に薄膜を形成する基板処理で、処理の進行具合をリアルタイムで把握して処理の終了時点を精度よく検出できる方法を提供すること。
【解決手段】基板1上に絶縁膜2を形成する基板処理装置10であって、絶縁膜2を波長可変単色光sで照射し、絶縁膜2および基板1からの各反射光を干渉させる干渉光発生手段12と、所望膜厚での干渉光強度Iが極小になるように単色光sの基準波長λ0を設定する基準波長設定部28と、基準波長を挟む2波長(λ1、λ2)間で単色光sを波長変調する変調部26と、これに応じた干渉光強度Iを検出する干渉光検出器18と、絶縁膜2が所望膜厚に達する直前から所望膜厚に達するまでの干渉光強度Iの変化に基づいて、最大波長(λ2)時と最小波長(λ1)時の干渉光強度の差分ΔIが零または所定値になる時点を基板処理の終了時点として検出する終了時点検出手段20とを備える。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
測定装置、測定方法及びステージ装置
【課題】置の大型化を招くことなく移動ステージの位置検出を可能とする測定装置を提供する。
【解決手段】第1軸方向に沿って可動体に第1ビームを出射し、可動体で反射した第1ビームが第1光路で進む前記第1光学部材と、第1軸方向に沿って可動体に第2ビームを出射し、可動体で反射した第2ビームが第2光路で進む第2光学部材と、第1軸方向に沿って可動体に第3ビームを出射し、可動体で反射した第3ビームが第3光路で進む第3光学部材と、第1光路を進んだ第1ビーム、及び第2光路を進んだ第2ビームが互いに干渉する干渉計と、干渉計での干渉に基づいて、第3軸方向における可動体の位置情報を得る算出装置とを備え、第1軸方向に沿って可動体に向かう第3ビームの進路は、第3軸方向について、第1光路の進路と第2光路の進路との間に位置する。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
検出装置
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
41 - 60 / 526
[ Back to top ]