
Fターム[2F065PP11]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708)
Fターム[2F065PP11]の下位に属するFターム
Fターム[2F065PP11]に分類される特許
81 - 100 / 426
浸せき試験用自動測定システム
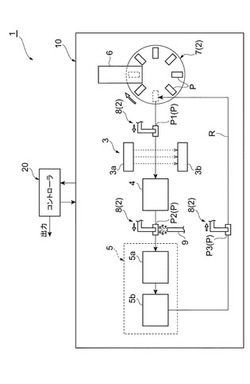
【課題】測定の省力化及びシステム構成の最小化が可能となる浸せき試験用自動測定システムを提供する。
【解決手段】浸せき試験用自動測定システム1は、ゴム試験片Pを自動移送する移送部2と、移送部2によってゴム試験片Pが供給され当該ゴム試験片Pの長さを測定する長さ測定部3と、長さ測定部3による測定後にて移送部2によってゴム試験片Pが供給され当該ゴム試験片Pの気中重量及び水中重量を測定することによりゴム試験片Pの質量及び体積を測定する質量体積測定部5と、移送部2、長さ測定部3及び質量体積測定部5の動作を制御すると共に長さ測定部3及び質量体積測定部5で測定した測定値のそれぞれを取り込んで外部出力するコントローラ20と、を備えている。また、長さ測定部3は、移送部2によるゴム試験片Pの移送中にゴム試験片Pの長さを測定する。
(もっと読む)
浸せき試験用自動測定装置

【課題】測定の省力化及びシステム構成の最小化を可能とする。
【解決手段】浸せき試験用自動測定装置1は、アーム4によりゴム試験片Pが供給されゴム試験片Pの長さを測定するレーザ測長器6と、レーザ測長器6による測定後にてアーム4によりゴム試験片Pが供給されゴム試験片Pの質量及び体積を測定する質量体積測定器8と、ターンテーブル3によりゴム試験片Pが供給されゴム試験片Pの硬さを測定する硬さ測定器9と、各部位の動作を制御プログラムに基づき制御すると共に測定値のそれぞれを取り込んで外部出力するコントローラ20と、を備えている。ターンテーブル3は、第1及び第2テーブル間で組替可能に構成され、レーザ測長器6は、アーム4によるゴム試験片Pの移送中に当該ゴム試験片Pの長さを測定し、コントローラ20は、第1及び第2制御プログラムを制御プログラムとして有している。
(もっと読む)
表面性状測定装置および表面性状測定用コンピュータプログラム
【課題】曲面を有した物品における曲面の表面の粗さまたはうねりを簡単かつ短時間に精度良く測定することができる表面性状測定装置および同表面性状測定装置に適用される表面性状測定用コンピュータプログラムを提供する。
【解決手段】表面性状測定装置100は、ワーク支持体101、撮像装置102、バックライト照明装置103およびコンピュータ装置110を備えている。ワーク支持台101は、被測定物であるボールスタッド90を支持する。撮像装置102は、ボールスタッド90におけるボール部92の輪郭を撮像する。バックライト照明装置103は、ワーク支持台101にセットされるボールスタッド90におけるボール部92の輪郭を介して撮像装置102に向けて光を照射する。コンピュータ装置110は、表面性状測定プログラムを実行することにより撮像装置102およびバックライト照明装置103の作動を制御してボール部92の表面粗さを測定する。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】 透過性膜の膜厚を算出する際に用いられる撮影データの最大値に関する信頼性を評価して、信頼性の高い膜厚測定が行えるようにする。
【解決手段】 固定長の焦点距離を備える撮影部2を種々の高さに位置させて、基材と透光性膜とを含む基板を撮影した際の撮影画像の合焦度を算出する合焦度算出部6aと、撮影部2の位置に対する合焦度からなる合焦度曲線の極大値を検出する極大値検出部6bと、極大値の信頼度を算出して、極大値が適正値か否かを判断する信頼度算出判断部6cと、信頼度算出判断部6cにより適正と判断された極大値に対応する撮影部2の位置を境界位置として算出する境界位置算出部6dと、境界位置に基づき透光性膜の膜厚を算出する膜厚算出部6eと、を備える。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
マーク打点方法及びマーク打点装置
【課題】タイヤサイド部におけるマークを打点すべき位置に凹凸が存在する場合であっても、マーク不良を起こすことなくマークを打点し、かつ、打点されたマークを迅速に検査することが可能なマーク打点方法及びマーク打点装置を提供する。
【解決手段】タイヤサイド部の表面におけるマーク打点予定領域を撮像手段により撮像し、当該撮像されたマーク打点予定領域における基準面に対する凸部表面の高さが予め規定された閾値を下回るときにマーク打点予定領域にマークを打点する。
(もっと読む)
円板状基板内径測定装置、円板状基板内径測定方法及び円板状基板の製造方法
【課題】製造した磁気ディスク用基板の全てについて、歩留まりを悪化させることなく高精度で内径測定を行うことができる円板状基板内径測定装置、円板状基板内径測定方法及び円板状基板の製造方法を提供すること。
【解決手段】レーザ変位計(測定装置)100は、ラインレーザ112を円板状基板200の主表面に照射するラインレーザ光源110と、円板状基板200を支持する基板ホルダ130と、ラインレーザ112が円板状基板200の円孔210を通過するように基板ホルダ130を昇降させる昇降部140と、基板ホルダ130の昇降中、円板状基板200を反射又は通過したラインレーザ112を受光し、該光量分布を取得するレーザセンサ120と、レーザセンサ120が取得した光量分布から円孔210の内径を測定する内径測定部150とを具備し、基板ホルダ130は、測定時の基板姿勢が、地面に対し鉛直から所定の角度の範囲に入るように円板状基板200を支持する。
(もっと読む)
面位置検出装置、露光装置、および露光方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
実装精度検査方法及びその検査方法を用いる検査装置
【課題】表示パネルと光学手段との相対的な位置精度を低コストかつ高速に検出できる、実装精度検査方法及びその検査方法を用いる検査装置を提供する。
【解決手段】検査対象となる表示装置は、複数の画素群が配列された表示パネルと、画素群から複数のN(Nは2以上の自然数)視点に向けた画像表示を提供するための光学手段と有する。検査装置は、視点毎に異なる画像信号を有する検査パターンを表示装置に出力する画像出力手段と、表示装置から表示された検査画像の境界線分の傾きと位置を抽出する抽出手段とを備え、抽出手段が抽出した傾きと位置に基づいて表示パネルと光学手段との位置精度を検出する。
(もっと読む)
ワーク外形形状検出方法及び画像処理システム
【課題】
安価なモノクロカメラを使用するとともに撮像画像の画像データ処理を少なくして画像処理を高速に行うことができ、撮像時にワークの影が発生してもワーク外形の検出に影の影響を排除することができ、低コストでワーク外形検出方法及び画像処理システムを提供する。
【解決手段】
第1ステップで取得した撮像画像を床面と支持部の中間値の輝度を閾値として二値化し、二値化した画像データをマスクデータにする。支持部の表面の明度と同レベルの明度を有するワークを、支持部に支持した状態でモノクロカメラによりワーク台とともに撮像し、ワーク撮像画像を取得する。ワーク撮像画像から、マスクデータにおける支持部に関する画像領域52,54を消去して支持部消去画像を取得する。支持部消去画像から、支持部消去部分を含んだワーク外形線57を抽出し、支持部消去部分を補間処理してワーク外形線58を取得する。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
部品長さ検知機構および部品供給装置
【課題】コストを低減しつつ部品の長さを検知することができる部品長さ検知機構および部品供給装置を提供すること。
【解決手段】本発明の一態様は、1組の発光手段34と受光手段36とからなる光センサ28と、ネジ32を移動させるための供給テーブル22、テーブル台24、アクチュエータ26と、を有し、発光手段34が発する光の照射方向とネジ32の移動方向とが鋭角に交わり、ネジ32が移動する経路における上流側検査位置44と上流側検査位置44よりも発光手段34から遠い位置にある下流側検査位置46の少なくとも2箇所にて光センサ28がネジ32を検知した回数をもとにネジ32の長さを検知すること、を特徴とする部品長さ検知機構10である。
(もっと読む)
ワーク検査装置
【課題】搬送されるワークの外形を正確に検査する。
【解決手段】両側にガイド壁22を備えた直線状のワーク搬送路Pを設け、搬送されるワークWを上方からCCDカメラ4で撮像してワーク寸法の良否を検査するワーク検査装置であって、CCDカメラ4に中心を一致させて下方のワーク搬送路Pに向けて設けたリング状照明器3と、ガイド壁22の上方にこれに沿いワーク搬送路Pに向けて設けたライン状照明器5A,5Bとを備える。
(もっと読む)
法線ベクトル追跡型超精密形状測定方法
【課題】
計測点の座標と法線ベクトルの計測値から被測定物の表面形状を導出し、各軸の制御方法を工夫することによって各計測点での計測時間を短縮し、被測定物の表面形状測定の高速化と高精度化を図ることが可能な法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法を提供する。
【解決手段】
2軸2組のゴニオメータと1軸の直進ステージの内、2軸1組のゴニオメータと1軸の直進ステージは、QPDからの出力を直接軸駆動モータに入力するフルクローズドフィードバック制御(追従制御)にするとともに、残り2軸1組のゴニオメータはセミクローズドフィードバック制御(定値制御)とし、各軸のエンコーダ出力とQPD出力とを同時に取得し、前記エンコーダ出力から導出する計測点座標と法線ベクトルをQPD出力で補正して、ゴニオメータ制御系の定常偏差の影響を排除する。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 距離画像を用いて外観検査を行う際に、メモリ資源の効率的な活用と検出精度の低下を防ぐ。
【解決手段】 3次元形状のワークを撮像するカメラ30からワーク表面までの距離に応じて各画素の濃淡値が変化する距離画像を生成し、生成された距離画像からその距離画像に含まれるワーク固有の形状情報を削減するために、生成された距離画像の一部又は全部の画素について、それぞれ形状情報に基づく濃淡値との差分を求め、形状情報が削減された距離画像を用いて画像処理を実行し、ワークの良否を判定し、判定結果を示す判定信号を出力する。
(もっと読む)
円錐面測定装置
【課題】被検円錐面と球面測定用干渉計とのアライメント調整を高精度に行い、被検円錐面の径測定の精度を向上させることが可能な円錐面測定装置を得る。
【解決手段】平面測定用干渉計20、2軸傾き調整ステージ32、XYステージ34およびZステージ35により、被検円錐面91と球面測定用干渉計10とのアライメント調整を行うとともに、基準レンズ12のキャッツアイポイントが被検円錐面91上に位置する基準位置に、被検レンズ90を配置する。球面測定用干渉計10からの測定光の一部が被検円錐面91上の円弧状の領域に対し垂直に入射する被検円錐面測定位置に、被検レンズ90を移動させ、基準位置と被検円錐面測定位置との間の距離をレーザ測長機41の検出値により求め、その距離に基づき被検円錐面91の径の測定値を算出する。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
レンズ素子のニュートン縞観察装置
【課題】レンズ素子の嵌合面およびフランジ面の形成精度、表面状態を、被検面を傷付けることなく、ニュートン縞を利用して簡便に観察できるようにしたレンズ素子のニュートン縞観察装置を得る。
【解決手段】嵌合式レンズ素子1のレンズ嵌合部2の嵌合面2Aおよびフランジ面2Bに密着可能な嵌合面用ゲージ面20Aおよびフランジ面用ゲージ面20Bと、光軸Lと平行に入射された観察光11を反射して嵌合面用ゲージ面20Aに直角方向から照射するためのミラー面20Eとを有するニュートン原器20を交換可能に備え、ゲージ面20A、20Bで反射した参照光と、レンズ素子1の嵌合面2Aおよびフランジ面2Bで反射した測定光との干渉によるニュートン縞を得て、レンズ素子1の嵌合面2Aおよびフランジ面2Bの評価を行う。
(もっと読む)
ガラス基板検査装置及びガラス基板製造方法
【課題】簡易な構成で素材、板厚、端面の状態等を含めたガラス基板等の状態の検査を行うことが可能なガラス基板検査装置及びガラス基板製造方法を提供することを目的としている。
【解決手段】画像データを解析する解析手段を有し、前記解析手段は、前記画像データから特定の色の画像データを抽出する色抽出手段と、前記色抽出手段により抽出された前記特定の色の画像データを含む第一の所定領域の画像データの色の変化に基づき前記ガラス基板の端面に対する加工が行われているか否かを検出する端面状態検出手段と、
を有する。
(もっと読む)
麺測定器
【目的】種々の麺類の太さを麺に対して非接触状態で計測することができ、且つ麺の太さが合格基準範囲内に収まっているか否かを瞬時に判定することができる麺測定器を提供すること。
【構成】 サンプル麺Mの長さ方向の一端を挟持固定する上部クランプAと、前記麺の他端を挟持固定する下部クランプBと、前記上部クランプAと前記下部クランプBとを結ぶ仮想線Lvに対して交差する光を発するセンサ8と、該センサ8よる麺の太さを数値表示する表示部83とからなること。前記上部クランプAと前記下部クランプBは水平面を同一角度回動自在とすること。
(もっと読む)
81 - 100 / 426
[ Back to top ]