
Fターム[2F065PP11]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708)
Fターム[2F065PP11]の下位に属するFターム
Fターム[2F065PP11]に分類される特許
61 - 80 / 426
欠陥検出装置及び欠陥検出方法
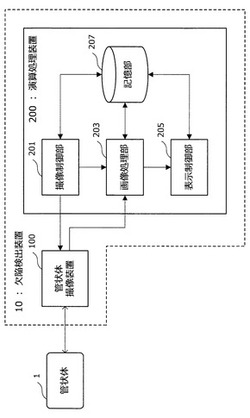
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
三次元形状測定装置

【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】光軸に垂直な面内方向の分解能を容易に変更することができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】本発明の一実施形態に係る三次元画像取得装置10は、対物レンズ13の被計測体側共役点の位置と被計測体15の位置とのXY方向の相対的な位置関係を変更するよう載置台16をXY方向に変位させる載置台変位部22を有する。また、三次元画像取得装置10は、載置台変位部22および現在の載置台16の位置における被計測体15の高さを決定する高さ決定部54を制御することにより、載置台16の初期位置と、載置台16を初期位置からXY方向に被計測体側共役点の互いの離間距離より小さい距離移動させた1または複数の補間位置と、のそれぞれの位置での被計測体側共役点における被計測体15の高さの情報からなる被計測体15の三次元形状情報を取得する形状情報取得部55を有する。補間位置は、複数の補間位置パターンのうちの1つが選択されて決定される。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段と、画像計測演算手段が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
輪郭線検出方法及び輪郭線検出装置
【課題】背景面が光を散乱するものであり、特にワークの高さが低い場合であっても、ワークの輪郭を明確に検出できる輪郭線検出方法及び輪郭線検出装置を提供する
【解決手段】ワークWからの光を光検出部5で検出することにより、前記ワークWの輪郭線を検出する輪郭線検出方法であって、前記光検出部5を設ける位置を前記ワークWの上方に設定し、光射出部2から射出される照明光が実質的に、前記ワークWの少なくとも一部の輪郭線である検出対象輪郭線から外側へ所定距離離間した位置を内縁とする、又は前記検出対象輪郭線から内側へ所定距離離間した位置を外縁とする光照射領域7にのみ照射されるように設定しており、前記光照射領域7が、前記検出対象輪郭線よりも下方であるとともに照明光が散乱される面上に形成されるように設定した。
(もっと読む)
ひずみ測定装置とその製造方法及び載荷試験装置
【課題】管状部材の内周面にひずみ検出部を簡単に接着してこの管状部材のひずみを容易に測定することができるひずみ測定装置とその製造方法及び載荷試験装置を提供する。
【解決手段】ひずみ検出部5A〜5Lは、模型鏡ボルトBの各検出位置PA〜PLに発生するひずみを検出する光ファイバ式のひずみゲージである。挿入部材10は、模型鏡ボルトBの内周面にひずみ検出部5A〜5Lを接着するために、このひずみ検出部5A〜5Lを接着剤層11によって外周面に保持した状態で、この模型鏡ボルトBに挿入される。挿入部材10は、ひずみ検出部5A〜5Lを模型鏡ボルトB内に案内し検出位置PG〜PLに位置決めするための治具として機能する。接着剤層11は、挿入部材10の外周面に装着された多孔質材に流動性接着剤を含浸させて形成されている。
(もっと読む)
ねじ検査装置
【課題】ねじの異なる規格への適用性が良く、検査効率が高く測定精度の良いねじ検査装置を提供する。
【解決手段】定位手段は、台枠の搭載面311にねじを着脱可能に装着するためのチャックユニット41が取り付けられ、該チャックユニット41にはねじが装着されるための、該搭載面と平行なX方向の両端に開口すると共に該X方向と垂直なZ方向に開口するスリット412が形成されている。検出手段5は、スリット412に対してZ方向沿いに往復移動可能に台枠に設けられた滑り台と、滑り台をZ方向沿いに往復移動させるように駆動する第1の動力源54と、スリット412のX方向の両端開口の外側に互いに対向して滑り台に設けられている発光器52と受光器53とを有する。
(もっと読む)
コンクリート構造物のひずみ計測方法
【課題】施工ブロック毎に分割して構築されるコンクリート構造物のひずみを効率の良い作業で精度良く計測する。
【解決手段】施工ブロック毎に順次コンクリートを打設して構造物を構築するものとし、一つの施工ブロックのコンクリートを打設した後、隣接する施工ブロックのコンクリートを打設するための型枠内には、先の施工ブロックに埋設された可撓管に接合して連続する可撓管を配置する。複数の施工ブロックのコンクリートの打設が終了すると可撓管16内に光ファイバケーブル18を挿入するとともにグラウト17を注入し、光ファイバケーブルとコンクリート1aとを一体化する。その後、光ファイバケーブルの一端にひずみ測定器を接続し、光パルスを入射して後方散乱光を検知する。後方散乱光の周波数の変化及び後方散乱光を検知した時間から橋桁の各位置に生じたひずみの大きさを計測する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
位置計測方法、位置制御方法、計測方法、ロード方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】位置計測用のマークが存在しない移動体の位置を管理することを可能にする。
【解決手段】 所定形状のプレート50が着脱可能に搭載された移動体WSTの位置をその移動座標系を規定する計測装置18等で計測しつつ、プレート50の一部をアライメント系ALGで検出するとともにその検出結果と対応する前記計測装置の計測結果とに基づいてプレート50の外周エッジの位置情報を取得する。このため、その移動体WST上に位置計測用のマーク(基準マーク)などが存在しなくても、プレートの外周エッジの位置情報に基づいて、プレートの位置、すなわち移動体の位置を前記計測装置で規定される移動座標系上で管理することが可能になる。
(もっと読む)
3次元複合機および3次元複製方法
【課題】立体物の複製を家庭やオフィス等で手軽に実現しする3次元複合機を提供する。
【解決手段】処理用空間としてのチャンバーと、3次元モデルデータに基づいて上記チャンバー内に立体物を造形可能な造形部30と、上記チャンバー内に載置された測定対象物を3次元測定して3次元モデルデータを取得可能な測定部20と、上記測定部20により取得された3次元モデルデータに基づいて上記造形部30に上記測定対象物の複製物を造形させる造形制御部とを備える3次元複合機10とした。
(もっと読む)
形状測定装置
【課題】光学式のセンサー部によって測定する、被検物の形状測定の測定精度を向上させる。
【解決手段】被検物にライン光を照射する光照射部(91)およびライン光の照射方向とは異なる方向から被検物に照射されたライン光を検出する検出部(92)を有するセンサー部(20)と、互いに直交する座標系の座標軸方向それぞれに、センサー部(20)を移動させる移動部と、移動部に対してセンサー部(20)を回転可能に支持する回転機構と、座標系の基準位置を示す球を検出することにより、移動部に対するセンサー部(20)の回転方向を算出する回転方向算出部(359)と、を備える。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
FBGセンサを用いた計測方法およびその装置
【課題】
FBGセンサを用いた計測方法およびその装置において、1箇所のFBGセンサに対して歪みと温度を感知するFBG部と温度のみを感知するFBG部に分けることで、歪みと温度を同時計測することができるようにする。
【解決手段】
コアに回折格子を形成した光ファイバの一部を被測定物の歪みに依存する状態で固定し、コアに回折格子を形成した光ファイバの他の部分を被測定物の歪みに依存しない状態で固定し、光ファイバの被測定物の歪みに依存する状態で固定した部分から検出された信号と光ファイバの被測定物の歪みに依存しない状態で固定した部分から検出された信号とを用いて被測定物のひずみと温度とを計測するようにした。
(もっと読む)
円形状機械部品の測定装置および測定方法
【課題】 測定精度の悪化を防止し、測定対象を正確に拘束し固定することなく簡易に測定できると共に、部品交換に要する工数等の低減を図ることができる円形状機械部品の測定装置および測定方法を提供する。
【解決手段】 円形状機械部品Wにおける円形状部分を成す円の弦となる箇所の幅寸法を測定可能なレーザ変位計2を用い、支持された円形状機械部品Wの形状測定対象に対してレーザ変位計2を対向させて、このレーザ変位計2に、それぞれ前記弦となる任意の2箇所以上の箇所の幅寸法を測定させる。演算手段4は、レーザ変位計2で測定された前記任意の2箇所以上の各箇所の幅寸法を、直交座標系における各両端2点の座標点に変換し、これら各座標点から算出される近似円から、形状測定対象となる前記円形状部分の直径および中心位置を算出する。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、所定の特徴パターンの変形を考慮しつつ測定精度の向上と情報処理量の低減とを図ることができるひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明のひずみ測定装置Saおよび該方法では、試験体SMに外力を作用させる前後における試験体SMの外力作用前画像Aおよび外力作用後画像Bから、パターンのマッチングによって仮伸縮率が求められ、この求めた仮伸縮率を用いて外力作用前画像Aまたは外力作用後画像Bにおけるパターンが変形され、この変形されたパターンに基づいて、試験体SMの外力作用後画像Bから、パターンのマッチングによって伸縮率が求められる。
(もっと読む)
伝熱管又は蒸発管の減肉状態監視装置
【課題】ボイラ設備の装置を分解あるいは開放することなく、フィンチューブの腐食及び減肉状況を評価することができる伝熱管又は蒸発管の減肉状態監視装置を提供する。
【解決手段】伝熱管又は蒸発管の減肉状態監視装置10Aは、伝熱管又は蒸発管の減肉状態を監視する監視装置であって、伝熱管又は蒸発管のフィン11に沿って移動する移動手段12と、前記移動手段12に設けられ、伝熱管又は蒸発管の表面の減肉状態をレーザ計測するレーザ計測手段13と、レーザ計測手段13にレーザ光を導入する導光路及び反射光を伝達する導出路を備えたケーブル手段14と、前記レーザ計測のデータを過去のデータ又は標準データと比較して、現在の減肉状態を判定する減肉状態判定手段とを具備する。
(もっと読む)
積層体、積層体の製造方法、製造装置及び膜厚測定方法
【課題】各層の膜厚測定を可能にする積層体、その積層体の製造方法、及び非破壊非接触で膜厚測定を行いフィルム異常の検査が可能となる膜厚測定方法を提供する。
【解決手段】複数の層を積層してなる積層体である。複数の層の少なくとも一層に対し、予め設定した位置に空隙を形成した。
(もっと読む)
61 - 80 / 426
[ Back to top ]