
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
201 - 220 / 527
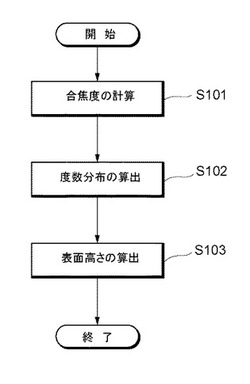
画像処理方法および顕微鏡装置
【課題】分解能を高めた画像処理方法を提供する。
【解決手段】物体を撮像装置に対して相対移動させながら当該撮像装置により得られた、物体の表面の複数の画像に基づく画像処理方法であって、複数の画像から物体の表面における同一箇所に該当する部分を抽出するとともに、当該抽出した部分の信号強度から物体の表面高さを求めて、表面高さの度数分布を求めるステップ(S101〜S102)と、度数分布に基づいて表面高さの確率密度関数を算出し、確率密度関数が最大となる表面高さを表面高さの真値として求めるステップ(S103)とを有している。
(もっと読む)
電線端末検査装置

【課題】 ラインCCDのピクセル配列密度が低く抑えられても、サブピクセルレベルで判定できるようにして、検査精度を高くする。
【解決手段】 光源2と光感知器3との間に被検査電線端末を通し、ラインCCD4を繰り返しラインスキャンして検査を行う。その際、黒ピクセル数が初めて0でなくなる位置から所定範囲内のピクセルにおいて、黒ピクセル数の増分が最大になるピクセルを求め、その前後所定個数のピクセルにおける増分を荷重値として、ピクセルの位置番号の加重平均値を求めて電線の先端位置を判定する。さらに、ストリップ位置より後方の部分について、検出されたデータ群を、ピクセル単位で前後に順次ずらせ、それぞれの位置で、基準データ群との一致度を算出して、一致度が最大となるずれ量を求める。さらに、その前後各1ピクセル分ずらした場合の一致度及びずれ量をも用いて、サブピクセルレベルでのずれ量を求め、防水シール挿入位置を判定する。
(もっと読む)
洋上監視システムおよび方法
【課題】 安価で軽量な構成により監視精度を高めることができる洋上監視システムを提供する。
【解決手段】 洋上の測定対象物Mを撮像して時系列の画像データを生成する撮像装置20と、画像データを解析して測定対象物Mの位置情報を生成する解析装置30とを備え、解析装置30は、各時刻における測定対象物Mの座標値を算出し、所定時間内の前記座標値の中央値または平均値から、測定対象物Mの位置情報を求める洋上監視システムである。
(もっと読む)
形状測定装置
【課題】被測定物の連続的かつ機械的な駆動なしに焦点面の異なる画像情報を短時間で得られる形状測定装置を提供する。
【解決手段】光量センサー2はセンサー素子2a〜2dを1次元方向に備える。センサー素子2a〜2dは光学系(図示せず)によって、被測定物1の計測線12近傍の高さHa,Hb,Hc,Hdに焦点Va,Vb,Vc,Vdを結ぶ。被測定物1の表面13は黒白に塗り分けられ、センサー素子2a〜2dと光学系を被測定物1の領域Y1から領域Y8方向に移動走査する。時刻で各センサー素子の光量値を読み出し、その値を位置とともに記録する。各センサー素子の光量値は、被測定物1の表面13に合焦ならば表面色の黒13bまたは白13wに対応し、合焦でなければ黒と白が混ざった灰色の値を持つ。この黒,白,灰色の光量値に基づき高さHa〜Hdについて合焦評価を行うことで、各領域Yについての高さを同定できる。
(もっと読む)
位置合わせを行う装置、方法、およびプログラム、ならびに基準モデルを作成する装置、方法、およびプログラム
【課題】モデルを利用した位置合わせにおいて、人間の関与を極力減らし、画像認識に資する部分を効率的にモデル化するための技術を提供する。
【解決手段】位置合わせを行う対象物と同じ種類の基準物に含まれる基準パターンである回路パターン2を撮像した撮像画像1から、特徴点抽出処理により特徴点3a〜3dなどの複数の特徴点が抽出される。そして、抽出された複数の特徴点それぞれの座標を含むモデル特徴箇所座標群5を含む基準モデルが記憶される。基準モデルは、各特徴点の周辺から切り出した画像を含むモデル特徴箇所画像群4をさらに含んでもよい。対象物を撮像して取得した対象撮像画像から抽出された複数の特徴点それぞれの座標と、基準モデル内のモデル特徴箇所画像群4とを利用して、基準パターンと対象パターンのずれを表すずれ量を算出して対象物に関する位置合わせ処理を行うことが可能である。
(もっと読む)
印刷された半田ペーストの検査方法および装置
【課題】プリント回路基板に印刷された半田ペーストについての三次元計測値をもとに、この基板に印刷された半田ペーストの形状の特徴を示す情報を得るための方法とそのための装置を提供する。
【解決手段】まず、プリント回路基板のパッド上やランド上に印刷された半田ペーストそれぞれの三次元形状に関するデータを生成し、このデータに基づいて印刷された半田ペーストそれぞれについての三次元形状を表す特徴量を抽出する。抽出された特徴量に基づいて印刷された半田ペーストを分類し、その分類毎に印刷された半田ペーストの数またはその検出対象全数に対する割合を算出する。算出された分類毎の印刷された半田ペーストの数またはその割合にもとづいて、半田ペーストの印刷状態の良否を判定する。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】操作者が熟練を要することなく最適な照明方式を選択することができ、高い精度で所望の形状を計測することができる画像計測装置、画像計測方法及びコンピュータプログラムを提供する。
【解決手段】落射照明手段を用いて撮像手段で計測対象物を撮像した第一の画像データと、透過照明手段を用いて撮像手段で計測対象物を略同じ位置にて撮像した第二の画像データとを記憶しておく。第一の画像データを表示し、表示された第一の画像データ上で計測位置の指定を受け付ける。指定を受け付けた計測位置に応じて第一の画像データ又は第二の画像データを記憶手段から読み出し、読み出した第一の画像データ又は第二の画像データに基づいて位置データを取得する。取得した位置データに基づいて、指定を受け付けた計測位置での計測を実行する。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】異なる時刻に撮影された2つの画像間の位置ずれ量を効率よく自動的に求めることを目的とする。
【解決手段】マッチング処理部202は、異なる時刻に撮影された2つの画像(例えば、地震が発生する直前及び直後の画像である発災前画像及び発災後画像)をメモリ252から読み取り、一方の画像(例えば、発災後画像)にて所定数の画素からなる第1の領域を1画素単位で移動し、第1の領域を移動する度に、第1の領域と、他方の画像(例えば、発災前画像)にて第1の領域と同じ位置にある第2の領域との間の相関係数をプロセッサ251により算出する。位置ずれ量算出処理部203は、マッチング処理部202が算出した相関係数に基づいて、上記2つの画像間の位置ずれ量を1画素未満の単位でプロセッサ251により推定する。
(もっと読む)
分布型光ファイバセンシングシステムを用いた構造物変状モニタリング方法及びその装置
【課題】地中での掘削作業により建設されたトンネルをはじめとして、橋梁、建造物などの構造物及び岩盤、山肌等の変形、挙動を監視する技術を提供すること。とくに粉塵が浮遊している鉱山のトンネルような空間に対しても広範囲にわたって変状をモニタリングできる方法を提供すること。
【解決手段】分布型光ファイバ歪みセンシングシステムを用いた構造物変状モニタリング方法において、モニタリング対象とする地下空間の天井や壁面、岩盤にロックボルトを打ち込み、該ロックボルトに2本一対の光ファイバセンサをたすきがけに固定することを特徴とする構造物変状モニタリング方法によって解決する。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、システムを較正すべく、投射光パルスを既知の角度方向にかつ既知の距離に配置された較正要素に指向させる手段(26)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
画像処理による曲線引き金具測定装置
【課題】曲線引き金具の設置角度を小型の装置で安全に測定する。
【解決手段】可視光を照射する投光器1と、曲線引き金具6を撮像するカメラ2と、カメラ2の映像を記録する画像記録部3と、画像記録部3から入力される映像を画像処理して曲線引き金具6の設置角度を求める画像処理部4とを備え、画像処理部4が、画像処理によって映像中のエッジを検出し、検出したエッジの量に基づいて映像中に曲線引き金具が撮像されているか否かを判定すると共に、エッジのうち垂直方向に延びる垂直エッジをトロリー線5として検出し、垂直エッジにT字状に接するエッジを曲線引き金具6として検出するようにした。
(もっと読む)
トロリ線摩耗量測定方法および測定システム
【課題】
手作業によることなく、高い精度でかつ摩耗量算出のデータ処理ロードを軽減して測定することが可能なトロリ線摩耗量測定方法および測定システムを提供することにある。
【解決手段】
この発明は、受光信号に基づいて得られる信号波形に対応する1ラインの摺動面データにおいてトロリ線摺動面の外側の背景レベルの平均値を算出し、この平均値を目安としてこれより上でかつ受光信号の最低レベルより低い第1の基準レベルを得て、この第1の基準レベルで1画面分のデータを二値化してノイズに対応する画面上の孤立点の座標を抽出する。そして1画面分のデータから孤立点を除去することで孤立点ノイズが除去された各1ラインの摺動面データを得る。そして、この1ラインの摺動面データに対して2つのパラメータに対応する摺動面の幅を容易に算出することができる。
(もっと読む)
露光装置
【課題】高いスループットと高い重ね合わせ精度を有する露光装置を提供する。
【解決手段】1枚のレチクル2を用いて、各モジュールでショット形状或いはフォーカス成分を測定し、その測定結果を用いて重ね合わせ露光を行うマルチモジュール型露光装置100を提供する。レチクル2及び投影光学系3の熱的変化成分を測定して個々の変動成分を合わせることによって、高精度な重ね合わせやフォーカス制御が可能となり、高スループット且つ高精度な位置合わせが可能となる。
(もっと読む)
格子画像の位相解析方法およびそれを用いた物体の変位測定方法ならびに物体の形状測定方法
【課題】 簡単な構成で材料および構造物などの物体の変位や形状やひずみを高精度で検出することができる位相解析方法を提供する。
【解決手段】 撮影された画像の元の輝度値(a)の左もしくは右から(縦方向の場合、上もしくは下から)1番目のスタート点から整数倍画素N(Nは3以上)毎に間引き(b)、左から2番目のスタート点からN画素毎に間引き(c)、左から3番目のスタート点からN画素毎に間引き(d)、抜けた画像データを線形補間することによって、元の画像を同じ解像度の画像を得る。
(もっと読む)
視線検出装置および方法、並びに、プログラム
【課題】正確に視線の方向を検出する。
【解決手段】顔向き推定部141は、視線の方向を検出する対象となる検出対象者の顔を撮影した顔画像に基づいて、検出対象者の顔の向きを推定する。目検出部142は、顔画像において、検出対象者の目の輪郭の少なくとも一部を検出する。瞳検出部143は、顔画像において、検出対象者の瞳を検出する。瞳方向推定部145は、人の目の輪郭に対する瞳の位置である瞳位置および顔の向きと視線の方向との間の相関関係、並びに、検出対象者の瞳位置および顔の向きに基づいて、検出対象者の瞳方向を推定する。本発明は、例えば、運転支援装置に適用できる。
(もっと読む)
画像検査装置
【課題】パターン形状に歪みがあり、エッジ強度にバラつきがある画像においても、的確なマッチング位置が得られる統一的なテンプレート・マッチング手法を提供する。
【解決手段】テンプレート・マッチングで得られた正規化相関マップに重心距離フィルタを施して得られた上位候補の各位置周辺における相関値寄与率マップを作成し、これらの相関値寄与率マップから補正強度画像を作成し、補正強度画像に基づいて輝度補正し、各候補位置周辺で再度局所的にマッチングを行い、新たに得られた候補位置と相関値によって候補をソートしなおす。これにより、パターン形状に歪みがあり、エッジ強度にバラつきがある画像においても、統一的に的確なマッチング位置を得ることができる。
(もっと読む)
画像処理方法およびプログラム
【課題】画像内の回転したマークの位置を迅速かつ正確に検出する。
【解決手段】ステップS1において、投影パターンを用いたマッチングにより、テンプレートと類似度の高い入力画像の領域を検出し、検出した領域の中心を候補点として抽出する。ステップS2において、各候補点について、候補点を中心とする所定の形状の領域であって回転角の異なる複数の領域の画像をマッチング対象画像として抽出する。ステップS3において、抽出されたマッチング対象画像とテンプレートのマッチングを行い、類似度を表すマッチングスコアを求める。ステップS4において、マッチングの結果に基づいて、入力画像のマークの位置および回転角を検出する。本発明は、例えば、画像の位置検出装置に適用できる。
(もっと読む)
地図データ生成装置および地図データ生成方法
【課題】光学的特殊物体も正確に認識して適切な周辺環境地図を生成する地図データ生成装置を提供する。
【解決手段】現在位置における自己位置を含むとともに全体がグリッドに分割された仮地図データを生成する仮地図データ生成部と、仮地図データのグリッドごとに過去のレーザー走査の結果を更新登録して蓄積するグリッド情報蓄積部と、グリッド情報蓄積部に蓄積されたグリッドごとの情報に基づいて各グリッドが障害物であるか移動可能であるかを判定する判定処理部と、判定処理部による判定結果に基づいて実際の環境を反映した真地図データを生成する真地図データ生成部と、を備える。判定処理部は、レーザーを反射する割合が高い所定方向範囲における反射レーザーの割合に基づいて各グリッドが障害物であるか否かを判定する。
(もっと読む)
検出装置および方法、プログラム、記録媒体、並びにシミュレーションシステム
【課題】どのようなボールであっても、正確に回転を検出することができるようにする。
【解決手段】特徴点抽出部91は、第1画像および第2画像において、エッジを検出し、検出された複数のエッジを、それぞれ第1画像または第2画像の特徴点群として記憶する。簡易回転部92は、第1画像の特徴点群の3次元空間内での座標位置を特定し、その特徴点群の座標位置を所定のオイラー角だけ回転させ、最隣接特徴点間距離が最小となるオイラー角を特定する。特徴点対応制御部93は、最小の最隣接特徴点間距離のオイラー角の分だけ第1画像を回転させ、第1画像と、第2画像との間で演算された相関値に基づいて、第1画像と第2画像において、それぞれ2つの特徴点の対応付けを行う。回転数検出制御部94は、対応付けられた特徴点に基づいて、単位時間当たりのゴルフボールの回転量と回転方向を特定し、回転数などに関する情報を検出する。
(もっと読む)
厚み計測装置
【課題】材料や表面状態等に関してより広い範囲の対象物の厚みを計測することができる厚み計測装置を提供する。
【解決手段】計測光源11から出力された計測光は、ミラー14cで反射されて参照光となり、対象物2の第1面2aで反射されて第1反射光となり、対象物2の第2面2bで反射されて第2反射光となり、ミラーM5で反射されて第3反射光となる。参照光の光路長は可変である。参照光,第1反射光,第2反射光および第3反射光は、光検出器15により受光される。厚み算出部16により、参照光と第1反射光との干渉による干渉光が光検出器15により受光されて検出された光強度がピークとなるときの参照用光路の光路長と、参照光と第2反射光との干渉による干渉光が光検出器15により受光されて検出された光強度がピークとなるときの参照用光路の光路長とに基づいて、対象物2の厚みが算出される。
(もっと読む)
201 - 220 / 527
[ Back to top ]