
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
121 - 140 / 527
画像処理装置、画像処理方法および画像処理プログラム

【課題】3次元オブジェクトを上方から撮影した画像に含まれている円筒状または円柱状の3次元オブジェクトを検出するための計算コストを減らすことができる。
【解決手段】3次元オブジェクト抽出部13は、画像に含まれる3次元オブジェクトを抽出する。円形図形検出部100は、上面領域の画像の低解像度画像を用いて円形図形のエッジと前記円形図形の中心点とを検出する。また、円形図形検出部100は、円形図形のエッジと円形図形の中心点とに基づいて、画像の領域のうち円形図形が含まれる領域を設定する。また、円形図形検出部100は、円形図形が含まれる領域の画像を用いて円形図形のエッジと中心点と半径とを算出する。3次元位置姿勢計算部21は、3次元オブジェクト抽出部が抽出した3次元オブジェクトのうち、円形図形の中心点と半径とに基づいて、上面が円形状である円筒または円柱状の3次元オブジェクトの形状を検出する。
(もっと読む)
多層膜の膜厚測定方法およびその装置

【課題】多層膜に光を照射して、その反射光のパワースペクトルのピーク位置から多層膜を構成する層の膜厚を算出する膜厚測定装置では、膜厚が同程度の層が複数あると、ピークが重なって層を同定できないという課題があった。本発明は、膜厚が同程度の層が複数あっても各層の膜厚を測定できる多層膜の膜厚測定方法及び装置を提供することを目的にする。
【解決手段】膜厚を測定する多層膜と一定距離離隔して光を反射するミラー板を設け、各層の境界およびミラー板で反射された反射光から膜厚を算出するようにした。多層膜とミラー板の距離を多層膜の厚さより厚くすることにより、ミラー板で反射されたピークと反射されないピークが分離でき、正確に膜厚を測定できる。
(もっと読む)
ツール寸法の計測方法、ツール寸法の計測装置、およびその計測装置を備えるロボット
【課題】ロボットのツール取付け部に取付けられているツールの寸法を計測する。
【解決手段】ロボット10のツール取付け部10gに対するツール基準点Tの位置を計測する方法であって、カメラ14が実際のツール基準点Tを撮影した状態で、ツール取付け部10gに対する任意位置を通過する任意回転中心線を中心として該ツール取付け部が回転するようなロボット10の動作を繰り返し実行する。また、ツール取付け部10gが回転する度にその回転によって移動した実際のツール基準点Tのカメラ撮影画像上における移動量を計測する。さらに、ツール取付け部10gの回転が終了する度に任意位置および/または任意回転中心線を変更する。これらにより、ツール取付け部10gの回転によって移動する実際のツール基準点Tのカメラ撮影画像上における移動量が略ゼロになる任意位置を特定し、特定した任意位置をツール取付け部10gに対するツール基準点Tの位置とする。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 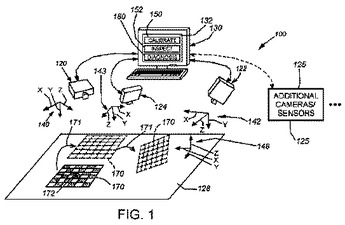 (もっと読む)
(もっと読む)
検査方法および検査装置
【課題】ウェハ表面の膜の端部の高さを精度よく測定可能な検査方法を提供する。
【解決手段】ステージによりウェハを略水平に支持した状態で、高さ検出器によりウェハの平面部の高さ位置を検出するステップS101と、上ベベル部に位置する膜の端部に合焦させた状態で、撮像部により膜の端部を撮像するステップS102と、データ処理部により、ステップS102で撮像した膜の端部の画像に基づいて膜の端部の高さ位置を検出し、ステップS101で検出した平面部の高さ位置と膜の端部の高さ位置との差から、ウェハの平面部に対する膜の端部の降下量を求めるステップS103とを有している。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
表面性状測定方法および表面性状測定装置
【課題】非平板物体の凹部あるいは中空部の表面粗さ、特に凹部底面あるいは中空部底面の表面粗さを、非接触で、定量的に、精度良く、且つ簡便に測定する。
【解決手段】パターン形成装置11によりパターンを照射し、ハーフミラー13で反射させて、測定対象物2である非平板物体の凹部底面あるいは中空部底面に垂直に投射し、反射したパターンを、ハーフミラー13を透過させて撮影部3(デジタルカメラ等)で撮影する。そして、得られた映像信号をコンピューター3でデータ処理することにより、測定対象面21の表面性状を測定・評価する。
(もっと読む)
膜厚測定方法及び膜厚測定装置
【課題】構造が未知の膜体に対し、比較的短い計算時間で複数の膜厚を測定することができる方法及び装置を提供する。
【解決手段】本発明に係る膜厚測定方法では、測定対象の膜体に対し、予め作成された既知の単一膜厚値dj(j=1,2,...,m)に対する基準スペクトルSjと、前記膜体の所定の測定領域内におけるn個の照射領域から得られる測定スペクトルVk(k=1,2,...,n)とを、基準ベクトルsj及び測定ベクトルvkに変換し、ベクトル空間{v1,v2,...,vn}と各基準ベクトルsjとの距離Ljを算出する(ステップS1〜S4)。そして、距離Ljが極小となる膜厚値djをそれぞれ膜厚値として出力する(ステップS5及びS6)。この方法によれば、膜体の構造が未知であっても複数の膜厚を測定することができると共に、計算時間が比較的短いため、半導体製造等の用途においてリアルタイムで膜厚を測定することができる。
(もっと読む)
脱脂度判定装置及び方法
【課題】定量的な基準で、製造工程の手順や個々の重量に影響されることなく、油分の性状に関わらず被測定物表面の脱脂状態を自動的に検知する。
【解決手段】試料30に光を照射する光源14と、試料30からの蛍光を検出するカメラ32と、蛍光の強度分布を空間パターンの解析で得られる第1の指標と、蛍光の強度分布を統計解析して得られる第2の指標の少なくとも2つの指標を用いて、試料30の脱脂の均一性及び脱脂の度合いを判定する手段を有する。
(もっと読む)
アライメントマークの検出方法
【課題】エッジ検出により、見え方が多種多様なワーク・アライメントマーク(ワークマーク)のパターンの位置を、正しく検出できるようにすること。
【解決手段】アライメント顕微鏡によりワークマークのパターンの画像を受像し、この画像を制御部に送る。制御部では、取得したパターンの画像[(a)(d)]の中心付近から複数の放射方向について、距離に対する輝度の分布を求める[(b)]。そして、求めた輝度分布を微分し、距離に対する輝度の変化である微分値を求め[(c)]、微分値の極大値の位置を、各放射方向について求める。求めた極大値の位置を、それぞれ一つずつ抽出して組み合わせ、極大値の位置を通る閉曲線に近似した円を複数求める。この複数の円の半径と、ワーク・アライメントマークの半径とを比較し、上記複数の円のなかから半径が最も近い円を選択し、その円の中心位置をワーク・アライメントマークの位置とする。
(もっと読む)
車軸検知システム
【課題】タイヤの誤検知を抑制して、車軸の検知確率を改善した車軸検知システムを得る。
【解決手段】車両3の三次元データAを取得する三次元画像撮像装置1と、三次元データAに対して誤検知データ軽減処理を行う三次元データ閾値処理装置21と、誤検知データ軽減処理後の三次元データA’から検知領域Rでのゲート処理後の三次元データBを抽出する高さ・距離ゲート装置22と、検知領域Rを高さ方向に分割して総数N個の高さビンを作成し、ゲート処理後の三次元データBの高さヒストグラムCを作成する高さヒストグラム算出装置23と、高さヒストグラムCに基づきゲート処理後の三次元データBが所定数以上格納されたビン数nと高さ方向に分割したビン総数Nとの比率n/Nをデータ存在確率Pとして算出するデータ存在確率算出装置24と、データ存在確率Pに基づき検知フラグFを発生する検知フラグ発生装置25とを備えている。
(もっと読む)
板材の光学式形状測定方法及び測定装置
【課題】測定値がばらつき、エッチング加工される精密部品の母材に要求される形状精度を保障可能な測定精度を確保する。
【解決手段】板材形状測定範囲内での等間隔の棒状光源配置と位相変化測定板材上方に棒状光源を配置して、板材表面に観察される棒状光源の鏡像をカメラにて撮影した画像に基づき板材の形状を測定する板材の光学式形状測定方法において、
複数の棒状光源を板材形状測定範囲にわたって等間隔に配置し、カメラにて撮影した画像上の棒状光源の配列方向に垂直な方向の周期的な輝度分布波形を得て、
フラットな基準平面測定時の周期的な輝度分布波形に対する位相変化量を測定することにより、板材表面の角度分布を求めることにより、板材の光学式形状を測定する。
(もっと読む)
エッジ検出方法及び画像処理装置
【課題】被撮像物の材質あるいは背景や周辺環境、さらには、光源の照明方向や明るさに左右されることなく被撮像物のエッジ位置を正確に検出する。
【解決手段】被撮像物IOのエッジを検出するために、制御部3は、被撮像物を実質的に半円形状で囲むように複数設けられた光源LEDを予め定められた順番で1つずつ点灯させることで、その点灯タイミングに同期して被撮像物を定点からカメラ2で撮像して当該被撮像物の濃淡画像を連続的に取得する。演算処理部4は、この点灯タイミングに同期して連続的に取得したすべての濃淡画像で、画素列毎に各画素の階調を比較して、階調の最大値となる画素と最小値となる画素との差分値を微分処理して画素列毎に微分値分布を算出し、この微分値分布から予め定められた閾値以上の画素位置をエッジ点として検出する。
(もっと読む)
非接触計測装置および非接触計測方法
【課題】同期信号等の出力インタフェースを有しないカメラを使用し、撮像と被測定物またはカメラの位置情報を、制御回路を使用せずに同期して撮像を行う非接触計測装置および非接触計測方法を提供することを課題としている。
【解決手段】非接触計測装置は、アクチュエーター10、レーザー12、カメラ13、信号処理・制御ユニット20、画像表示装置30から構成されている。信号処理・制御ユニット20は、制御部101と、画像データ取り込み部102と、グレースケール変換部103と、画像データ記憶部104と、相関比較部105と、停止判定部106と、輝度抽出部107と、重心算出部108と、高さ算出部109と、計測結果出力部110とから構成されている。
(もっと読む)
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。 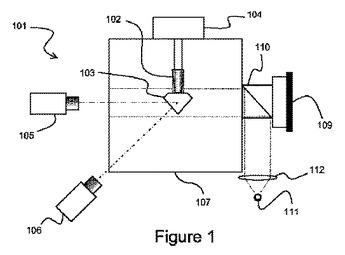 (もっと読む)
(もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】 被対象物との距離と位置とを高精度測定できる三次元計測装置を得ること。
【解決手段】被対象物5を撮像素子14により撮像する撮像系10と、被対象物5と撮像系10との異なる距離毎に撮像された各画像により検知された輝度が予め定められ閾値以上の輝度であることにより被対象物5を検知する明点抽出部32と、画像の明点を中心とした複数の画素を含む一定領域ごとの輝度を検知し、該一定領域内の輝度分布を求めると共に、該輝度分布に基づいて輝度重心値を求める輝度重心の演算部36と、輝度重心値が検知された画素14aが有する輝度と、周囲の画素14aが検知した輝度とを、輝度重心値が有する輝度に補正した輝度補正値を得る輝度補正部38と、輝度補正値に基づいて被対象物5との距離値を求めると共に、輝度重心値に基づいて被対象物5の位置を検知する三次元検知部43と、を備えたものである。
(もっと読む)
投影露光装置、投影露光方法、及び半導体装置の製造方法
【課題】ウェハ平坦度などの製造プロセス条件に対して最適なスキャン速度を設定することを可能とし、露光性能と生産性を高いレベルで両立させて歩留まりの良い露光を実現する。
【解決手段】実露光に先立って、ウェハ面形状のフォーカス・レベリング軌道を求め、前記軌道を用いた場合のレチクルステージとウェハステージ2との相対位置誤差を推定する。更にスキャン速度算出手段6により、同期誤差の移動平均・移動標準偏差の期待値を、代表的なスキャン速度複数通りに対してそれぞれ算出した後、プロセスに見合った同期誤差のしきい値を満たす最大スキャン速度を各ショット毎に求め、それに応じた露光量等を再設定し、コンソール8に実際に設定された1ショット毎のスキャン速度を表示する。
(もっと読む)
画像処理方法
【課題】 立体的な対象物の3次元形状を計測する際に問題となる画像中に観測される輝度値の変動領域の判定を行う画像処理方法を提供する。
【解決手段】 画像処理方法は、対象物Qを照射装置F1で照明し、カメラC1によって撮像した2次元画像データFD12を得る第一撮像工程と、同一のカメラC1によって同一の対象物Qを異なる照明位置から照明装置F2で照明して撮像した2次元画像データFD13を得る第二撮像工程とを行い、2次元画像データFD12とFD13とから反射光量による輝度値の差分データを生成し、この差分データの平均値を基準に標準偏差を閾値にして、閾値以上の輝度を示す差分データを対象物Qの画像データの変動領域と判定する抽出工程とを具備し、対象物Qの3次元形状データが正確に生成される効果を奏する。
(もっと読む)
グレージングユニットの品質を分析する方法
本発明に記載のグレージングユニットの品質を分析する方法は、
グレージング(2)の外側表面による反射によって生成されるテストチャート(4)のデジタル画像を生成するステップであり、テストチャート(4)が、インターフェースライン(13)を間に規定する複数のコントラスト要素(12)から成るパターンを示すステップと、
生成される画像からグレージング(2)を代表する量を計算するステップであり、計算が、処理ユニット(8)によって行われるステップと、
基準値に対して代表値の計算値を比較するステップと
を含む。
代表的な量は、グレージング(2)の外側表面による反射によって生成されるテストチャートの画像の歪みを代表する。 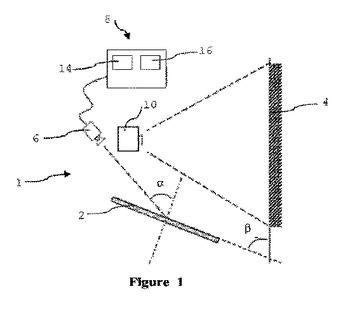 (もっと読む)
(もっと読む)
121 - 140 / 527
[ Back to top ]