
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
101 - 120 / 527
レーザスポット識別装置、方法及びシステム

【課題】
レーザスポットを識別して該レーザスポットの座標の位置決めを行う装置及び方法を提供する。
【解決手段】
当該装置は、撮像装置により撮像された撮像画像から該画像の前景画像を算出する前景演算部と、前記装置の初期化段階に、前景演算部により算出される前記前景画像に基づいて、前記前景画像における画素の輝度、飽和度及び色調の閾値を自動予測する閾値予測部と、前記前景画像及び前記画素の輝度、飽和度及び色調の閾値により、レーザスポットを検出するレーザスポット検出部と、前記レーザスポット検出部により検出されたレーザスポットにより、前記レーザスポットの前記撮像画像内での座標を算出する位置決め部とを有する。
(もっと読む)
情報処理装置、その処理方法及びプログラム

【課題】
被写体の三次元計測時に用いる投影パターンをより高い密度で投影できるようにした技術を提供する。
【解決手段】
情報処理装置は、複数の計測線パターンと、当該複数の計測線パターンに対して複数の交点を有するとともに交点間の形状が特徴付けられる基準線パターンとを含むパターンデータを生成し、当該生成されたパターンデータに基づく投影パターン光が投影された被写体を撮像した撮像画像を入力し、当該撮像画像から交点を抽出し、撮像画像における基準線パターン上の交点間に特徴付けられた形状の一次元的又は二次元的な配置を示す情報を同定情報として取得し、当該同定情報に基づいてパターンデータにおける基準線パターンと撮像画像における基準線パターンとを対応付け、当該対応付け結果に基づいてパターンデータにおける計測線パターンと撮像画像における計測線パターンとを対応付ける。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフのホーンの折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された入力画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理装置が、入力画像上のホーンに対して設定される複数の検査点に基づいてパンタグラフのホーンを検査直線として抽出する検査直線設定部5hと、検査直線と予め設定する基準直線との間の検査角度を算出する検査角度計算部5iと、検査角度に基づいてホーンの折れの有無を判断するホーン折れ判断部5jとを備える構成とした。
(もっと読む)
半田印刷検査装置及び半田印刷システム
【課題】半田印刷を行うにあたり、生産性の低下抑制等を図ることのできる半田印刷検査装置及び半田印刷システムを提供する。
【解決手段】半田印刷検査装置は、CCDカメラによって撮像された画像データに基づき、2つのランド2a,2bと接する半田ブリッジ3bを検出し、当該半田ブリッジ3bと接する2つのランド2a,2bの間の距離L1をブリッジ距離として算出する。そして、当該距離L1が許容範囲内であるか否かを判定し、当該距離L1が許容範囲内でないと判定した場合に、所定の重欠陥処理を実行する。
(もっと読む)
視差推定装置およびそのプログラム
【課題】本発明は、視差の推定精度の低下を抑制する視差推定装置を提供する。
【解決手段】視差推定装置1は、正規化相互相関で算出した類似度にコサイン逆関数を適用して第1の重み係数を乗じた誤差関数を用いてデータ項を生成するデータ項生成手段11と、スムーズ項生成手段12と、ブロック間でメッセージを伝搬するメッセージ伝搬手段13と、視差候補決定手段14と、正規化相互相関で算出した類似度にコサイン逆関数を適用して第1の重み係数より大きな第2の重み係数を乗じた誤差関数を用いてデータ項を生成するデータ項生成手段21と、スムーズ項生成手段22と、画素間でメッセージを伝搬するメッセージ伝搬手段23と、メッセージ伝搬手段23が更新した下位階層におけるエネルギーが最小となる視差であって、視差候補決定手段14から入力された視差候補に含まれる視差を視差情報として決定する視差決定手段24と、を備える。
(もっと読む)
位置姿勢推定方法及びその装置
【課題】 標準的な形状の三次元形状モデルに比して、形状のばらつきを持つ物体であっても、当該物体の位置姿勢を高精度に推定する方法を提供する。
【解決手段】 物体の三次元標準形状を表す三次元モデルを構成する特徴のずれの統計量を推定し、特徴ごとに信頼度を決定する。撮像装置によって取得した観測データから抽出した特徴と三次元モデル中の特徴とのずれ量を算出する。三次元モデルから抽出した各特徴に関するずれ量と信頼度とに基づいて、物体の三次元位置姿勢を推定する。
(もっと読む)
検査装置
【課題】設定された精度の検査結果を得るのに要する時間の点で有利な検査装置を提供する。
【解決手段】異物または欠陥としての不具合に関して物体を検査する検査装置は、光を照射された物体からの光を検出し、当該光の強度が閾値を超えた前記物体上の位置を示す信号を出力する検出部と、前記物体上の位置に異物または欠陥としての不具合が存在することを示す情報を出力する制御部と、前記物体上の位置に前記不具合が存在する確率を示す情報を記憶する記憶部と、前記不具合の検査漏れの数に対する上限値を示す情報を入力する操作部と、を備える。前記制御部は、前記検出部に既定回数(少なくとも1回)前記検出を行わせ、推定された総数と前記記憶部に記憶された情報が示す前記確率とに基づいて、決定された全回数から前記既定回数を減じた残り回数の前記検出を前記検出部に行わせる。
(もっと読む)
ビード検査方法及びビード検査装置
【課題】検査対象の大きさに関わらず、非破壊でビードののど厚を算出可能なビード検査方法及びビード検査装置を提供する。
【解決手段】ビードBの品質を検査するビード検査工程S1及びビード検査装置1であって、ビード検査装置1は、ろう付けワイヤWの供給速度を計測するワイヤ供給速度計測装置11と、第一母材M1、第二母材M2、及びビードBの表面の位置座標データを計測し、解析する解析部12とを具備し、ろう付け前に第一形状データを計測する第一形状データ計測工程S10を行い、ろう付け後に第二形状データを計測する第二形状データ計測工程S30を行い、第一形状データ、第二形状データ、及びろう付けワイヤWの供給速度に基づいて、特徴量の予測値を算出する特徴量算出工程S40を行い、特徴量の実測値と、のど厚の実測値とに基づいて作成される回帰式によってのど厚の予測値を算出するのど厚算出工程S50を行う。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 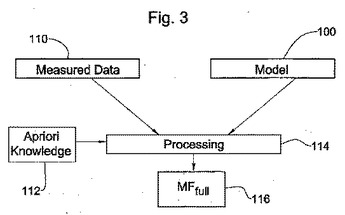 (もっと読む)
(もっと読む)
位置ずれ量測定方法、光学装置調整方法、情報記憶媒体、および位置ずれ量測定装置
【課題】情報記憶媒体に対する、記録再生を行う際の、2次元像の歪みによる位置ずれ量を測定する方法を確立し、2次元像の歪みの原因となる、光学系装置の調整方法を確立することで、記録情報の復号エラーの低減を実現する。
【解決手段】2次元情報の像と撮像素子との位置合わせの基準となる、規則的に配置された複数個の特定パターンとしてのSYNCマーク32と、隣り合うSYNCマーク32の各配置の中間点に、位置ずれ検出用マーク39とを有する、2次元情報としてのページデータ30において、SYNCマーク32の位置と、位置ずれ検出用マーク39の位置との距離について、撮像素子上の実際の2次元像での前記距離と、本来の歪みのない2次元像での前記距離との差を、位置ずれ量として測定する。上記測定された位置ずれ量を基に、2次元像の歪みの原因となる光学系装置を調整することにより、2次元像の歪みを的確に抑えることが可能となる。
(もっと読む)
コンクリート画像抽出方法
【課題】背景や障害物を含むコンクリート構造物の画像から、誤差となるコンクリート面以外の背景や障害物を除去すること。
【解決手段】コンクリート構造物の色と同じ色であって、コンクリート構造物のテクスチャと同じテクスチャの画素をコンクリート候補領域として構造物抽出部131で抽出し、Cannyエッジ抽出法を用いてコンクリート候補領域から当該コンクリート候補領域内に前景として存在する障害物のエッジを抽出し、コンクリート候補領域内の各画素の輝度値を用いて中央画素に対する16個の近傍画素のテクスチャ量Skをそれぞれ計算し、最大のテクスチャ量を有する近傍画素が位置k=9にあって、16個のテクスチャ量の分散値が0.0001以上である場合に、当該中央画素をコンクリート領域として抽出し、モルフォロジーのDilation領域拡大法を用いてコンクリート領域を障害物のエッジに到達するまで拡大する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】テンプレートマッチングによる対応点探索を行なうステレオマッチング手法において、隠れ領域が存在する場合でも簡易な処理で精度の高いマッチングを行なう。
【解決手段】境界画素指定部21は、被写体の影響によって第1の画像および第2の画像のいずれかにおいて写っていない領域である隠れ領域といずれにも写っている領域である非隠れ領域との境界に対応する1または複数の画素である境界画素を第1の画像および第2の画像においてそれぞれ指定する。相関計算範囲決定部22は、第1の画像および第2の画像における各境界画素に基づいて相関計算範囲を決定する。相関計算部13は、第1の画像における複数のブロック画像と第2の画像における複数のブロック画像との間のすべてまたは一部の組み合わせごとに、相関計算範囲に従って画素値の相関係数を算出する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】2次元データの3次元復元を好適に行う画像処理装置、画像処理方法、および、プログラムを提供する。
【解決手段】デジタルカメラ1は、通常の可視光画像を撮影するための可視光カメラ部21に加え、遠赤外線画像を撮影するための遠赤外線カメラ部24を備える。可視光画像を小領域に分解し、各領域の特徴量を推定する。また、遠赤外線画像に基づき、人物や動物がいる領域を特定する。これらの情報に基づき、各領域の3次元情報を求め、3次元情報を持つ画像データを生成する。
(もっと読む)
板厚分布の測定方法
【課題】安価な2軸スライダーを用いて、高精度に(半)透明基板の板厚分布を測定する方法を提供する。
【解決手段】(半)透明基板の一方の面から光を入射し、表面と裏面の反射位置を検出して板厚を測定する変位センサ−を用いた板厚分布を測定する方法であって、変位センサーの周辺に少なくとも3個のセンサーを配置し、これらのセンサーは、変位センサーと(半)透明基板との位置関係を測定して、(半)透明基板に対する変位センサーの位置及び姿勢を一定に制御しながら(半)透明基板の板厚分布を測定する方法であり、半透明基板における測定においては、半透明基板に接した、液体層を介して板厚の測定を行う。
(もっと読む)
波面操作および改良3D測定方法および装置
【課題】光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
検査装置および検査方法
【課題】画像認識に適した検査用の画像に用いる撮像画像を決定するための作業を簡素化するとともに決定基準を標準化することが可能な検査装置および検査方法を提供する。
【解決手段】この外観検査装置100(検査装置)は、複数の照射角度で照明光を照射可能な照明部41と、検査対象部位Pおよび非検査対象部位Qを複数の照射角度の照明光を用いてそれぞれ撮像する撮像部42と、複数の照射角度の照明光を用いてそれぞれ撮像された複数の撮像画像中の検査対象部位Pにおける光の強度と、複数の撮像画像中の非検査対象部位Qにおける光の強度とに基づいて、検査用画像に用いる撮像画像を決定する演算処理部51とを備える。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
計測システム、画像補正方法、及びコンピュータプログラム
【課題】照明系及び撮像系の双方の測定対象物との位置関係が可変である場合の撮像画像による3次元計測を正確に行う。
【解決手段】照明系101の偏角、撮像系102の偏角を考慮して輝度を補正した場合に想定される空間変調器上の輝度分布(照明系101と撮像系102の双方を考慮した輝度分布補正値)を生成する。この輝度分布補正値と、位置関係に起因しない静的な輝度分布補正値とから、3次元計測システムにおける輝度分布の補正値を生成し、この輝度分布の補正値に基づいて、照明パターン画像の階調変換をし、階調変換した照明パターン画像に従った照明を行う。また、動径の情報と、測定対象物103の反射率とを基に、3次元システムの光量減衰率を求め、この3次元システムの光量減衰率と、基準とする光量減衰率との比較結果から、光源の強度を調整する。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、凹凸欠陥を検出することができ、検査の安定化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、第1の方向、たとえばタイヤ回転方向での各画素の濃度を微分した微分値に基づいて、欠陥候補が大規模凹凸欠陥であるか否かを、凹凸の種類ごとに予め定める専用しきい値に基づいて判定する。次に、画像を構成する画素のうち最小の濃度の画素の位置を中心とする第1の方向での予め定める微分範囲について、画素の濃度を微分した微分値を加算した微分和に基づいて、小規模凹欠陥であるか否かを判定する。さらに、各画素を中心とする第1の方向での予め定める微分幅での微分値に基づいて、鋭角凹欠陥であるか否かを判定する。
(もっと読む)
101 - 120 / 527
[ Back to top ]