
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
21 - 40 / 527
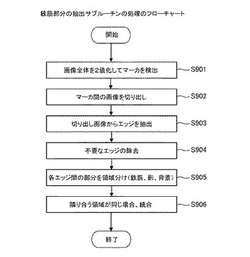
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
画像処理によるトロリ線摩耗測定装置

【課題】ラインセンサ画像中のトロリ線とトロリ線以外の物体とを切り分け、トロリ線摩耗面の誤検出を低減することを可能とした画像処理によるトロリ線摩耗測定装置を提供する。
【解決手段】車両の内部に設置された処理用コンピュータが、車両の屋根上に設置されてトロリ線を撮影するラインセンサカメラ2から入力される画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、入力された画像に対してGSTH処理を行ってGSTH画像を作成するGSTH処理部4bと、入力された画像に対して二値化処理を行って二値化画像を作成する二値化処理部4cと、入力された画像に対してトロリ線の摩耗部分の両側のエッジを検出するトロリ線摩耗部エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の摩耗量を検出するトロリ線摩耗部幅計算部4eとを備える構成とした。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】錠剤の変更にも柔軟かつ円滑に対応することができ、しかも検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、画像データに基づき錠剤の輪郭を抽出し、輪郭上における第1の所定点及び第2の所定点の接線の向き情報を演算するとともに、第1及び第2の所定点で挟まれた第3の所定点の接線の向き情報を求め、第3の所定点の接線の向き情報が、第1の所定点の接線の向き情報及び第2の所定点の接線の向き情報に基づく許容範囲を逸脱している場合に、当該第3の所定点に関し不良候補として判定する。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】PTPシートの製造過程における錠剤の欠け等の検査に際し、検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、目標となる錠剤の輪郭に関し、重心を原点とする各角度毎の複数の各点の接線の向き情報を目標向き情報として記憶しておき、検査に際し、抽出された錠剤の輪郭に基づき重心を特定するとともに、前記各角度毎の対応する各交点の接線の向き情報を求め、当該接線の向き情報と目標向き情報とを比較する。そして、1の交点の接線の向き情報が、対応する目標向き情報に対し許容範囲を逸脱している場合に、不良候補として判定する。
(もっと読む)
検査方法および検査装置
【課題】マスクの歪の影響によらずパターンの良否を正確に判定することのできる検査装置および検査方法を提供する。
【解決手段】マスク上の任意の少なくとも4点の座標を測定する(S101)。次いで、これらの少なくとも4点について、それぞれ対応する設計データの各座標との差を求め、最も差の大きい1点を選択する(S102)。次に、選択した1点と設計データの座標との差が予め設定した閾値を超えるか否かを判定する(S103)。閾値以下であれば、少なくとも4点全てを用いて、光学画像と参照画像との位置合わせを行う(S104)。一方、閾値を超える場合には、この点を除外し、残りの少なくとも3点を用いて位置合わせを行う(S105)。
(もっと読む)
塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラム
【課題】塗膜の将来の劣化状態を予測できる塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラムを提供すること。
【解決手段】塗膜劣化予測装置1の仮想劣化画像作成手段11は、所定のパラメータ及び時間変数に対応する複数の仮想劣化画像を作成する。対象画像作成手段12は、塗装面の撮影画像から対象画像を作成する。仮想プロファイル作成手段13は、仮想劣化画像の統計量として劣化部の個数f、面積率a、標準偏差sを算出し、f−a−s空間座標上に仮想プロファイルを示す。統計量算出手段14は、対象画像から統計量を算出し、対象値特定手段15は、対象画像に近い仮想プロファイルの統計量を特定し、特定した特定量に対応するパラメータ及び時間変数を特定する。劣化予測画像作成手段16は、特定されたパラメータを劣化進行モデルに入力し、時間変数に特定された値よりも大きい値を入力して、劣化予測画像を作成する。
(もっと読む)
表面性状測定装置および表面性状総合評価方法
【課題】鏡面に近い面の表面性状を、それぞれの製品あるいは業界に特有の感性に近い指標に基いて定量的且つ総合的に評価できるようにする。
【解決手段】コンピュータ制御にてディスプレイ11に表示したチェックパターンを被測定面21に投影して、反射像を撮影装置12により撮影し、その画像データを収得してコンピュータ3でデータ処理するよう構成した鏡面計1を使用し、コンピュータ3に、鏡面度、鏡面度バラツキ、光沢度、シャープネス、うねり又は形状誤差、コントラストおよび白濁度といった複数の測定項目の算出ロジックを含むコンピュータソフト5を組み込んで、それら複数の測定項目を順次自動的に測定し、鏡面度を含む複数の測定項目を指標として表面性状を評価できるようにする。
(もっと読む)
特定欠陥の検出方法、特定欠陥の検出システムおよびプログラム
【課題】ウェーハの表面に生じうる特定欠陥をより確実に検出することが可能な検出方法、検出システムおよび検出プログラムを提供することを目的とする。
【解決手段】本発明の特定欠陥の検出方法は、ウェーハの表面に光を照射して該ウェーハの表面上の欠陥の位置に対応して検出される輝点の面内位置情報である輝点マップを取得する工程(S101)と、前記輝点マップにおいて、特定欠陥の発生が予想される領域である判定対象領域と、該判定対象領域以外の所定領域である参照領域とを特定し、前記判定対象領域における輝点密度の、前記参照領域における輝点密度に対する比を算出する工程(S102)と、算出された前記比の値に基づいて、前記特定欠陥の発生の有無を判定する工程(S103)と、を有することを特徴とする。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
3次元形状モデル高精度化方法およびプログラム
【課題】被写体を撮影した画像と背景のみを撮影した画像から、被写体3次元モデルを高精度に復元する方法を提供する。
【解決手段】各カメラの被写体シルエット画像から視体積交差法により復元されるVisual Hullの表面に存在するボクセルのオブジェクトらしさに関する尤度を算出し、オブジェクトらしさに関する尤度をもとにVisual Hullの整形を行い、Visual Hullの整形が収束するまで、算出と整形を繰り返し適用する。上記のVisual Hullから獲得される3次元形状モデルのテクスチャ状態を評価し、3次元形状モデルのテクスチャ状態をもとに3次元形状モデルの整形を行い、3次元形状モデルの整形が収束するまで、評価と整形を繰り返し適用する。
(もっと読む)
ウエハの特性決定のための方法とシステム
【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
計測装置
【課題】被加工物の研削時におけるノイズ信号による誤判定を防止し、被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の上面で反射した反射光と光路長が一定の基準反射光に基づいて被加工物の厚み方向における上面までの2点間の距離を計測する計測装置であって、被加工物の上面で反射した反射光と光路長が一定の基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準反射光の光路長との光路長差に対応して出力される信号強度における現在出力された値と前に出力された値との絶対値の差を求め、この絶対値の差を各光路長差毎の信号強度における現在出力された値に加算し、加算された値が最も高い光路長差を被加工物の厚み方向における上面までの2点間の距離として決定する。
(もっと読む)
画像解析による管腔形成試験の評価方法および評価装置
【課題】管腔形成試験で撮影された培養細胞画像から作用させた物質について、50%阻害濃度が簡易に得られる管腔形成阻害作用の評価方法および装置を提供する。
【解決手段】評価対象画像データから網目領域を抽出し、各網目領域の面積と数を計測する段階と、網目領域の属性評価項目を計測する段階と、濃度別に各評価項目の管腔形成能を相対値として算出する段階と、評価項目数に応じて放射状に伸びた軸上に、前記算出された管腔形成能の相対値をプロットして、濃度別にレーダーチャートを作成する段階と、前記濃度別のレーダーチャートの原点とプロットした点までの距離によって算出したチャート多角形の大きさと歪みに基づいて管腔形成能を合算し、濃度別に合算値である管腔形成能を算出する段階と、算出した濃度別の合算値である管腔形成能をシグモイド曲線へ当てはめて濃度依存的阻害曲線と50%阻害濃度を算出する段階とを備えたことを特徴とする。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
形状測定方法
【課題】形状測定装置自体の振動や蛇行の影響を受けずに測定対象の形状を正確に測定すること。
【解決手段】高さ方向に関する測定対象の形状を左右同時に測定する測定ステップ(STP1)と、測定対象の右側及び左側の面全体を走査する走査ステップ(STP2)と、測定対象の右側測定データと左側測定データとから、それぞれ独立に短周期成分を除去する振動除去ステップ(STP3)と、短周期成分を除去した右側測定データと左側測定データとの両方を用いて長周期成分を除去する蛇行除去ステップ(STP4)とを含む。
(もっと読む)
光束の位置変化検出装置
【課題】光束の検出器への入射位置の変化が微小な場合においても感度良く光束の位置の変化を検出することが可能となる光束の位置変化検出装置を提供する。
【解決手段】光束101の位置変化検出装置であって、検出装置は、2つ以上の画素を有し、光束101の光照射量を信号値として検出する検出器102によって構成され、検出器102で検出された信号値に基づき、2つ以上の画素に入射する光束101が第1の入射位置から第2の入射位置へ変化する位置変化を検出するための演算を行う演算手段103を備え、演算手段103は、重み付け係数S/N2をIに乗じた演算値に基づいて演算するように構成されている。S:位置変化によって生じると想定される検出器102の各画素における信号値の変化量、N:光束101が第1の入射位置にあるときの検出器102の各画素で検出される信号値の標準偏差、I:検出器102の各画素で検出される信号値
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
21 - 40 / 527
[ Back to top ]