
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
141 - 160 / 527
GPUを使用したアイトラッキング
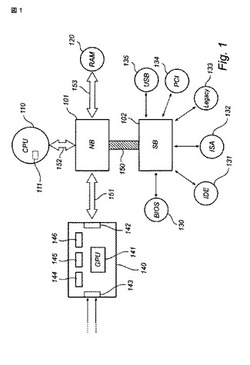
【課題】視覚ディスプレイを見ている眼球のアイトラッキングを改善する。
【解決手段】表示信号により制御可能な視覚ディスプレイを見ている眼球の注視ポイントを決定する方法であって、視覚ディスプレイにスクリーンパターンを生成するために、グラフィックスカードを使用して表示信号を生成することと、スクリーンパターンの角膜−強膜反射を含む眼球の画像を符号化する信号を受信することと、スクリーンパターンの角膜−強膜の反射のジオメトリの一部に基づいて、眼球の注視ポイントを決定することと、を具備し、注視ポイントを決定することは、並列プロセッサとしてグラフィックスカードを利用することを含む。さらに、ビューアの注視ポイントを決定するように構成された注視トラッキングシステム及びパーソナルコンピュータシステムが提供される。
(もっと読む)
障害物検出装置

【課題】障害物と判定できる対象の多様性を確保しつつ、路面等の対象の変化に対して誤判定を生じにくくする。
【解決手段】障害物検出装置は、カメラで撮影した路面Rの入力画像(カラー静止画像)をフレームFに則して複数の領域に分割し、これら分割領域毎に入力ファクターとして平均輝度や平均彩度を抽出する。そして、入力ファクターに基づいて基準空間における距離を演算し、この距離が閾値を超える場合に障害物があると判定する。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】計算量を削減し効率的な3次元位置情報の生成を行う構成を実現する。
【解決手段】カメラによる撮影画像を観測データとして入力し、特徴点位置情報を含む多次元正規分布データからなる状態データを更新することで特徴点の3次元位置を求める例えばSLAM処理において、3次元情報の生成対象領域を区分したサブマップを設定する。さらにサブマップに属しない特徴点に関するデータを含まないサブマップ対応の状態データを生成して、観測データに基づいてサブマップ対応状態データを更新する。本構成によれば状態データのデータ量が削減され、状態データ更新に伴う計算量を減少させることが可能であり、効率的な処理が実現される。
(もっと読む)
投影システム、投影制御装置及び投影システム制御プログラム
【課題】対象物の撮影画像に基づいて指定した目的像を対象物に投影する投影システムにおいて、撮影手段と投影手段との光軸差から生じる投影像と目的像とのずれを補正する処理を迅速に行う。
【解決手段】プロジェクタ10の原像面上にて、目的像を構成する注目点Xに対応する原像対応点Wを探索する際の探索範囲を、注目点Xそれぞれに対応してビデオカメラ8及びプロジェクタ10に関するエピポーラ幾何により定まる原像面におけるエピポーラ線Lpのうち一部区間に限定する。
(もっと読む)
膜厚測定装置
【課題】 膜厚を測定するフィルムに光を照射し、その反射光または透過光のスペクトルからパワースペクトルを求めて膜厚を算出する膜厚測定装置では、ポリプロピレンやポリエチレン等ヘイズが大きい材質ではかけ離れた測定値が頻繁に得られるので測定が困難であり、またフィルムの傾きやしわによって測定値のばらつきが大きくなるので、オンライン膜厚計として用いることが困難であったという課題を解決する。
【解決手段】 パワースペクトルのピーク高さ、ピーク面積、反射率などの測定品質を算出し、この測定品質と閾値を比較して測定の有効、無効を判断して、有効なときのみ膜厚測定値を外部に出力するようにした。かけ離れた測定値を除去することができるので、測定の信頼性が高まり、また従来測定が困難であったポリエチレン等の膜厚が測定できる。
(もっと読む)
画像処理方法及び画像処理装置
【課題】多層パターンに対してテンプレート・マッチングを短時間で且つ正確に行うことができる画像処理方法及び装置を提供する。
【解決手段】上層パターンと下層パターンをそれぞれSEM画像の間でパターン・マッチングを行ない、上層相関マップと下層相関マップを生成する。上層相関マップと下層相関マップを合成して合成相関マップを生成する。合成相関マップより、相関値が極大値を取る点を、マッチング位置とする。このような予備マッチングの結果を利用して、再度、高精度マッチングを行う。高精度マッチングでは、上層パターンと下層パターンを合成し、合成画像を生成する。この合成画像は層間ズレ情報が含まれている。この層間ズレ付き合成画像とSEM画像の間でテンプレート・マッチングを行う。
(もっと読む)
パターン形状計測方法、半導体装置の製造方法、およびプロセス制御システム
【課題】半導体デバイスの微細化に対して、プロセスマージンが狭小な場合でも半導体パターンの形状計測を高精度で行うことができるパターン形状計測方法を提供する。
【解決手段】パターン形状計測方法において、ベストマッチとなる計算波形が選出不可能な場合は、形状パラメータの内、少なくとも1つのパラメータを、パターン形状計測に依らない計測方法を用いる他計測装置にて得られた情報に基づいて固定値とし、再度、ライブラリと検出波形のマッチングを行い、ベストマッチとなる計算波形を選出するステップと、ベストマッチした計算波形より対象パターンの形状情報を求める。
(もっと読む)
画像処理装置、情報処理システム、画像処理方法、およびプログラム
【課題】遠景と近景とが共存する同一の被写体をとらえた複数の画像を対象とした対応点探索の高精度化を図ることが可能な技術を提供する。
【解決手段】画像処理装置が、第1視点から被写体を時間順次に撮像することで得られる複数の第1画像と、第2視点から被写体を時間順次に撮像することで得られる複数の第2画像とを取得する部分と、各第1画像に対して基準点を含む基準領域を同一配置となるように各々設定するとともに、各第2画像に対して基準領域の形状に対応する比較領域を同一配置となるように各々設定する部分と、複数の基準領域に係る画素値の分布から1つの2次元以上の空間に係る画素値の基準分布を生成するとともに、複数の比較領域に係る画素値の分布から1つの2次元以上の空間に係る画素値の比較分布を生成する部分と、画素値の基準分布と画素値の比較分布とを用いて、基準点に対応する複数の第2画像における対応点を検出する部分とを備える。
(もっと読む)
自動車用の障害物検知方法
【課題】自動車の環境における障害物の検知方法を提供する。
【解決手段】画像処理により障害物の第1の検知を行って、少なくとも1つの対象領域を定義することと、所定の特徴に対して対象領域に付与される信頼性指数によって、検知された障害物を分類することと、1つまたは複数のセンサにより第1の閾値未満の閾値範囲で障害物の第2の検知を行って、所定の位置を得ることと、所定の位置を基準目印に投影することと、対象領域を前記基準目印に投影することと、得られた2個の投影を対応させて、この対応に応じて、分類された障害物に所定の位置を割り当てることと、の各ステップを備える。
(もっと読む)
三次元姿勢測定装置および三次元姿勢測定方法
【課題】
輪郭が線状とならない回転体をステレオビジョンにより三次元姿勢を測定する。
【解決手段】
回転体を異なる2方向から撮像した一対の画像を取得し、前記一対の画像ごとに、測定対象である前記回転体の画像領域を抽出し、前記一対の画像ごとに、主成分分析により前記回転体の画像領域の主成分軸を算出して一の主成分軸を前記回転体の中心軸として設定し、前記一対の画像の中心軸上の点を対応付け、前記対応付けされた一対の画像から三角測量の原理により中心軸の三次元情報を求め、前記回転体の三次元姿勢を算出する。
(もっと読む)
位置測定装置及び位置測定方法
【課題】測定対象物の測定範囲が撮像領域と比較して極小・広大の何れの場合であってもその測定対象物の表面上の位置を測定可能な位置測定装置及び位置測定方法を提供する。
【解決手段】ワーク26よりも小さい寸法の撮像領域30を有する撮像素子50を、ワーク26の表面32上を相対的に移動させながら、ワーク26の表面32を撮像する。撮像領域30内の画像I(t)からワーク26の表面32上の模様(例えば、丸型溝82)を抽出し、抽出された前記模様の、撮像領域30内の画像I(t+1)中での変位量を検出し、検出された前記変位量及び前記寸法に基づいてワーク26の表面32上の位置を測定する。
(もっと読む)
表面検査方法
【課題】試料表面のパターン形状の良否を、環境温度変化の影響を受けることなく判定する表面検査方法を提供する。
【解決手段】偏光子7及び対物レンズ9を含み、ウェハ10の表面を照明する照明光学系21と、ウェハ10の表面からの反射光を、対物レンズ9を介して集光し、偏光子7とクロスニコル条件を満たすように配置された検光子12を通して対物レンズ9の瞳面の像を結像する検出光学系22と、瞳面の像を検出する第1の撮像素子17と、を有する表面検査装置100による表面検査方法は、第1の基準像を取得する第1のステップと、検査像を取得する第2のステップと、第2の基準像を取得する第3のステップと、第1及び第2の基準像の階調値の差を求め、当該差が所定値を越えたときに、検査像の階調値を補正する第4のステップと、補正後の検査像及び第1若しくは第2の基準像の階調値を用いてウェハ10の欠陥を検出する第5のステップと、を有する。
(もっと読む)
検査パラメータ設定方法、検査性評価方法および検査システム
【課題】高多層プリント配線基板の配線パターンを検査する際に誤報告の少ないキャリブレーション位置を決定すると共に、その検査性を評価しベリファイ作業時間を予測することができる検査システムを提供する。
【解決手段】検査システムにおいて、検査対象のプリント配線基板を構成する各層のCADデータとその層構成情報を元に検査面より透視した輝度成分マップを生成する。そして検査面を構成する輝度成分の組を求め、全組を網羅する1つ以上の輝度評価領域を決定した後、検査装置にて領域を撮像、各輝度成分に対応する統計輝度値を求め輝度成分マップに代入し、検査閾値を決定するための最適キャリブレーション位置を求め検査を行う。
(もっと読む)
画像検査装置、画像検査方法およびプログラム
【課題】少ない数の入力画像により高精度に画像検査を行うことができ、かつデータ処理の負担を低減することのできる画像検査装置を提供する。
【解決手段】基準空間の算出に利用する基準画像を複数の分割基準画像に分割する第1分割部104と、分割基準画像それぞれのマハラノビス距離に基づいて、画像検査の対象となる被検査画像の良否判定に利用する閾値を決定する閾値決定部110と、被検査画像を、複数の分割被検査画像に分割する第2分割部124と、分割被検査画像それぞれのマハラノビス距離に基づいて、代表値を決定する代表値決定部128と、代表値が閾値よりも大きい場合に、被検査画像に異常があると判定する良否判定部130とを備えた。
(もっと読む)
対象物検出装置及び対象物検出方法
【課題】周辺の状況や観測機器による影響を抑え、対象物を正確に検出することのできる対象物検出装置を得る。
【解決手段】射影装置2は、記憶装置1に記憶されている3次元の座標値をもつ点群データを平面に射影した射影パターンを生成する。平滑化装置3は、対象物に対し平滑化した射影パターン上でピークを生成するよう射影パターンを平滑化する。照合装置4は、平滑化した射影パターンとテンプレートパターンとを照合し、対象物が存在した地点の平滑化した射影パターンと一致あるいは近似するテンプレートパターンとの相関が高い平滑化した射影パターン上の位置を対象物の存在位置として検出する。
(もっと読む)
ノイズ除去装置、ノイズ除去方法、ノイズ位置検出装置、ノイズ位置検出方法、測定システムおよびプログラム
【課題】測定光の伝送経路上のノイズ源から生じたノイズ成分を除去する。
【解決手段】所定の測定面における測定光の分布データから、測定光の伝送経路に存在するノイズ源によるノイズ成分を除去するノイズ除去装置であって、測定面における測定光の分布データを、ノイズ源に対応する面まで伝播計算した分布データを算出する第1伝播計算部と、第1伝播計算部が算出した分布データにおいて、ノイズ源によるノイズ成分を除去した分布データを算出するノイズ除去部と、ノイズ除去部が算出した分布データを、測定面まで伝播計算した分布データを算出する第2伝播計算部とを備えるノイズ除去装置を提供する。
(もっと読む)
品質検査方法および品質検査装置
【課題】篩の編み目、コンクリート、地質、アスファルトの表面状態の品質を分析・評価することができる品質検査方法および品質検査装置に関する。
【解決手段】編み目または表面に微細開孔を有する被測定部材44が予め決められた大きさのものであるか否かをパーソナルコンピュータ41に予め記憶されたデータと比較することによって品質を判断することができる。デジタルカメラ42は被測定部材44を撮影し、微細開孔の大きさ、分布等により品質を分析することができる。デジタルカメラ42は、被測定部材44をデジタルカメラによって撮影し、画像データとしてパーソナルコンピュータ41に読み込み込まれる。パーソナルコンピュータ41はデジタルカメラ42によって予め読み込まれている基準スケールの画像データに被測定部材44の画像データを重ね1ピクセル毎に比較される。
(もっと読む)
道路形状認識装置
【課題】実際の道路形状を的確に検出することが可能な道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、自車両が走行する道路面について実空間上の距離Zと高さYの情報を有する距離データDを互いに異なる複数の地点で検出する距離高さ検出手段6と、複数の距離データDを自車両に近い側の群G1と遠い側の群G2とに分割し、群G1、G2の境界DL部分の距離データDを一方の群から他方の群に移し替えるごとに距離データDの近似直線L1、L2を算出する近似直線算出手段10と、距離データDを移し替えた群G1、G2ごとにそれぞれの近似直線L1、L2に基づく統計値をそれぞれ算出する統計値算出手段11と、統計値に基づいて近似直線L1、L2の組み合わせの中から1つを選択し、選択した近似直線L1、L2の組み合わせを用いて道路形状モデルを生成する道路形状モデル生成手段12とを備える。
(もっと読む)
球状体の直径不同の測定方法、選別方法および選別装置
【課題】 高速生産される球状体の直径不同を、生産速度に合わせて迅速、正確かつ安価に測定する方法と、その測定方法を用いた球状体の選別方法及び選別装置を提供する。
【解決手段】 揺動している球状体11の外形画像を、垂直方向と水平方向から複数回撮影する。(ア)垂直方向から撮影した画像について、各画像における直径の最大値(最大径)を求め、全画像を通して最大径の最大値(直径最大値)を求め、最大直径dmaxとする。(イ)水平方向から撮影した画像について、各画像における直径の最小値(最小径)を求め、全画像を通して最小径の最小値(直径最小値)を求め、最小直径dminとする。(ウ)最大直径dmaxと最小直径dminとの差、Δd=dmax−dminを直径不同とする。
(もっと読む)
形状推定システム、撮影装置、形状推定方法、プログラム及び記録媒体
【課題】 光源からの光により生じる対象物の影から対象物の形状をより適切に推定可能な形状推定システム等を提供することを目的とする。
【解決手段】 形状推定システム1において、影撮影装置5は、例えば、撮影部19の周囲に複数の光源151,・・・,15Nを配置し、例えば1回ずつ点灯させるN回点灯制御を行い、各点灯制御に同期して撮影部19は撮影する。撮影データは撮影データ記憶部21に記憶され、画像データ修正部27によりノイズ除去等の修正処理が施され、特徴情報生成部29は、例えば多段階のウェーブレット多重解像度解析を行い、各成分の二乗平均平方根を取ることにより得られる対象物3の影の特徴を示す特徴情報を生成する。対象物3が既知の形状であれば、学習部31は例えば自己組織化マップを学習させる。対象物3が未知の形状であれば、推定部35は学習後の自己組織化マップに提示して既知の形状の一つを対象物3の形状として推定する。
(もっと読む)
141 - 160 / 527
[ Back to top ]