
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
41 - 60 / 527
画像検査装置、画像検査方法、及びコンピュータプログラム
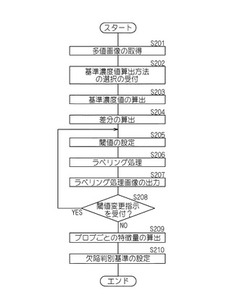
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
ロボット、位置推定方法及びプログラム

【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】回転可能なカメラの撮像画像から観測対象の人物の領域を検出し、検出された人物の領域に対して、カメラの回転角度を含む観測状況に基づいて複数の推定粒度の情報を有するパーティクルの推定粒度を変更し、各推定粒度を用いて観測対象の位置を推定するように構成する。
(もっと読む)
測定装置、測定方法、およびプログラム
【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
画像処理方法、プログラム、および画像処理装置
【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】変位量への換算を迅速に処理する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小スポットとして投射する。シリンドリカルレンズユニット21は、曲率半径の異なる2つのシリンドリカルレンズ30,31をもっており、それぞれに被検面23aで反射した反射光束に異なる量の非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部24は、受光面から得られる出力信号に基づいて被検面23aの変位を検出する。選択部33は、被検面23aの検出範囲に応じて、いずれか一方のシリンドリカルレンズ30,31を光路上にセットするように移動機構22を制御する。
(もっと読む)
作業内容測定装置及び作業管理装置
【課題】より高精度の作業内容の測定を実現すると同時に、低コストかつ環境負荷の少ない作業内容測定装置及び作業管理装置を提供する。
【解決手段】作業者及び当該作業者により作業される作業対象の画像に基づいて作業者及び作業対象に係る情報を取得し、かつ、作業対象または当該作業対象とつながった物体に設けられた第1センサーにて自己検出された、当該第1センサーの空間的位置に係る情報を取得し、作業者及び作業対象に係る情報と、第1センサーの空間的位置に係る情報とを統合することで、作業内容の測定結果を示す第1統合情報を生成する作業内容測定装置であって、作業者の一部に設けられた第2センサーにて自己検出された、当該第2センサーの空間的位置に係る情報を取得し、第1統合情報に対し、第2センサーの空間的位置に係る情報をさらに統合することで第2統合情報を生成し、第2統合情報を作業内容の測定結果として出力する。
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
ひずみ計測方法及びひずみ計測システム
【課題】測定対象物の表面に発生するひずみを、直接測定すること無く離れた位置から簡易に、かつ、高精度に計測可能なひずみ計測方法及びひずみ計測システムを提供する。
【解決手段】ひずみ計測システム1は、測定対象物2の表面の計測対象領域Sを正面から撮像する第1撮像装置3と、測定対象物2の側面を撮像する第2撮像装置5と、第1撮像装置3及び第2撮像装置5により撮像された画像に基づいて測定対象物2に発生するひずみを算出する計測装置10と、を備えている。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
カーボン薄膜の膜厚評価方法及びカーボン薄膜の膜厚評価装置
【課題】ダイヤモンドライクカーボン等のカーボン薄膜について、その膜厚を簡易な手法で評価できるようにした、カーボン薄膜の膜厚評価方法を提供する。
【解決手段】基材上に形成された厚さ100nm以下のカーボン薄膜の膜厚評価方法である。カーボン薄膜の膜厚と明度計測装置で計測したカーボン薄膜の明度との相関を求める工程と、明度計測装置によって被評価膜となるカーボン薄膜の明度を計測する工程と、計測した被評価膜となるカーボン薄膜の明度から先に求めた相関に基づき、被評価膜となるカーボン薄膜の膜厚を評価する工程と、を備える。
(もっと読む)
被写体位置計測装置、ディスプレイシステム、および被写体位置計測方法
【課題】被写体位置計測装置および被写体位置計測方法において、撮影人物の頭部等の被写体の一部分の位置を求める際、簡単な方式で上記一部分の位置を安定して求める。
【解決手段】被写体の一部分を球状体と見なして前記一部分の位置を求める。具体的には、装置は、少なくとも2方向からカメラを用いて撮影した被写体の前記一部分の画像のそれぞれにおいて、画像中の前記被写体の輪郭像を抽出する。さらに、前記輪郭像と前記画像中の第1の方向に延びる探索直線とが接する接点位置情報を求めることにより、撮影空間内において、前記カメラから延びて被写体の前記一部分と接する第1仮想直線を前記輪郭像のそれぞれについて求める。さらに、前記撮影空間において、前記第1仮想直線を前記第1の方向に対応する方向に所定の距離それぞれ平行移動した第2仮想直線同士の交点または前記第2仮想直線同士が最接近する点の位置を、前記一部分の中心位置として求める。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
光学式変位計
【課題】対象物の変位を正確に検出することが可能な光学式変位計を提供する。
【解決手段】投光部1は、偏光方向が互いに異なる第1および第2の光を選択的にワークWに照射する。ワークWからの反射光が、受光レンズ22を通して受光素子21に入射する。波形生成部は、受光素子21による第1および第2の光の受光量分布を示す第1および第2波形データを生成する。波形処理部7は、第1および第2の波形データの間で互いに対応するピークの比を算出し、算出された比に基づいて、第1および第2の波形データの各々から1つのピークを選択し、そのピークの位置を検出する。
(もっと読む)
表面検査装置
【課題】スリット光によって測定対象物に形成される光切断線における干渉縞を低減して良好に表面測定が行われる表面検査装置を構成する。
【解決手段】半導体レーザLDからのレーザ光LBから直線状の領域に拡がるスリット光Sを作り出してワークに照射し、これを撮影ユニットで撮影した画像データからスリット光Sが照射された光切断線を抽出してワークの表面形状データを生成するように表面検査装置を構成する。半導体レーザLDが、PN接合型で接合面の境界部分に沿って直線方向Mに形成される発光層17を有し、この直線方向Mが、スリット光Sの拡がり方向と直交するように相対的な姿勢を設定した。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
表面形状測定方法及び測定装置
【課題】正確性が向上した表面形状測定方法および測定装置を提供する。
【解決手段】このような表面形状測定方法は、少なくとも二以上の方向でパターン光を測定対象物に照射し、測定対象物から反射されたパターンイメージを取得する段階と、前記パターンイメージを用いて前記方向における高さを取得する段階と、前記方向における前記高さの増加率を表すベクトル場を取得する段階と、前記方向における前記高さに対する信頼指数を取得する段階と、前記信頼指数及び前記ベクトル場を用いて、統合ベクトル場を取得する段階及び前記統合ベクトル場を用いて測定対象物の各座標値に対する高さを測定する段階を含む。
(もっと読む)
位置変化判定装置、位置測定装置、位置変化判定方法及びコンピュータプログラム
【課題】センサの設置位置又は向きの変化に関して生じる労力を軽減すること。
【解決手段】設置位置又は設置の向きの変化に応じて測定結果が変化するセンサに対して取り付けられる位置変化判定装置であって、周囲の光を受光することによって、周囲の情報を取得する取得部と、前記センサが所定の位置及び所定の向きに設置された時点で前記取得部が取得した情報を初期情報として記憶する初期情報記憶部と、前記取得部によって取得された現在の情報と、前記初期情報記憶部に記憶される前記初期情報とを比較して、前記センサの現在の位置又は向きが前記所定の位置及び所定の向きから変化したか否か判定する位置変化判定部と、を備える。
(もっと読む)
3次元情報取得装置および3次元情報取得プログラム
【課題】対象と初期状態が異なる場合、この対象と初期状態との違いに基づく最適化処理の解の誤差を軽減すること。
【解決手段】位置姿勢逐次計測手段の初回起動時において最初に求めた初期フレームに対応する前記特徴点座標と前記カメラポーズ情報に対して、前記3次元座標および前記カメラポーズ情報の信頼度に応じて予め決められている加重値に基づく補正を行い、前記3次元座標の最適化を行う最適化処理手段を備えることを特徴とする。
(もっと読む)
41 - 60 / 527
[ Back to top ]