
Fターム[2F069BB13]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | 電子部品 (30)
Fターム[2F069BB13]に分類される特許
1 - 20 / 30
角型電池の外形測定装置
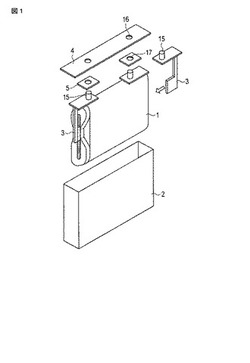
【課題】測定値のばらつきが小さく精度の良い角型電池の外形測定装置を得る。
【解決手段】電池7の垂直方向の外周面を把持しかつ7の水平方向の位置決めを行い、かつ電池姿勢を垂直に位置決めする側面位置決め機構22と、7の水平方向の外周面に当設可能であって7の水平面の垂直方向の位置決めをする水平面位置決め機構23と、搬送治具8に7を載置面から切り離す手段20を備え、7の垂直方向の外形を測定する際に、22により7の水平方向の位置決めと姿勢を垂直に位置決めし、かつ20により載置面から7を切り離した状態で、垂直方向外形測定手段12により7の垂直方向の外形を測定し、7の水平方向の外形を測定する際に、23により7の垂直方向の位置決めをし、かつ20により載置面から7を切り離した状態で、水平方向外形測定手段13により7の水平方向の外形を測定する角型電池の外形測定装置。
(もっと読む)
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法

【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
電子装置、電子装置の製造方法および機能素子の寸法の測定方法
【課題】備える機能素子を直接測定することなく、機能素子の寸法を精度よく測定することにより、機能素子の状態が把握されることができる電子装置を提供すること。
【解決手段】電子装置1は、基板2と、基板2上に配置され、固定電極31および固定電極31と空隙を隔てて対向配置された可動板322を備える可動電極32を有する機能素子3と、基板2上に設けられ、機能素子3が配置された空洞部6を画成する素子周囲構造体5と、基板2上の空洞部6の外部に設けられ、固定電極31に対応する第1の検査用膜41と、可動電極32に対応する第2の検査用膜42とを有する検査体4とを有し、検査体4は、所定の部位の寸法が測定されることにより、機能素子3の所定の部位の寸法を求めるために用いられることを特徴とする。
(もっと読む)
基板処理装置及び基板処理装置の制御方法
【課題】基板の走査中に生じるヨーイング等の誤差を補正することができると共に、基板処理手段が基板の所定位置に精度よく処理を施すことができる基板処理装置等の提供。
【解決手段】基板Pを固定する基板保持部11を載置する、Y軸方向に離れた基板搬送部22a及び22cのベース構造体2上の位置を測定することによって、間接的に基板P上のY軸方向に離れた2箇所の位置のそれぞれと、ガントリ3とのX軸方向の距離を測定する位置測定ユニット13a及び13bと、位置測定ユニット13a及び13bが測定した2つの距離が異なる場合に、該2つの距離が同じになるように基板搬送部22a〜22dを制御する走査制御部5と、基板Pとガントリ3とのX軸方向の距離を測定する相対位置測定部29とを備え、ガントリ3に搭載されたヘッドユニット25は、相対位置測定部29が測定した距離に基づくタイミングで、基板Pにインク塗布を行う。
(もっと読む)
ガラス基板およびガラス基板の反り検査方法
【課題】塗布材料の塗布厚みや塗布幅のばらつきを可及的に抑制し得る、反りの小さなガラス基板を提供する。
【解決手段】一辺の寸法L1,L2が500mm以上で、且つ板厚L3が4.0mm以下のガラス基板1であって、一方の辺に沿って100mmの等間隔で、且つ他方の辺に沿って500mmの等間隔で複数の小片2に分割すると共に、その分割した100mm×500mmの各小片2の長辺方向両端部を460mmの支持スパンLsで下方から支持した場合に、表面を上側にした状態で両端部を支持した時の自重による第一撓み量δ1と、裏面を上側にした状態で両端部を支持した時の自重による第二撓み量δ2との撓み量差(δ1−δ2)の絶対値が、全ての小片2で0.8mm以下となるようにした。
(もっと読む)
角度検出装置及び歩数計
【課題】 加速度センサを用いて構成が簡単で信頼性高く、小型化可能な角度検出装置を提供すること。
【解決手段】 各加速度センサ101a、101bは感度軸が相互に直交するように配置されると共に少なくとも動的加速度を検出して対応する検出信号を出力し、CPU108は加速度センサ101a、101bからの検出信号に基づいて、歩数計の筐体の傾きを算出する。CPU108は、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bを決定して該増幅手段からの検出信号に基づいて歩数計数を行い、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bのゲインを最適化し、利用しない増幅手段106a又は106bのゲインを小さくしてSN比及び歩数演算の精度向上を図る。
(もっと読む)
平面基板の支持部材
【課題】平面基板の形状測定時に、被測定基板の下端面形状の影響を低減し被測定基板に発生する平面の反りを低減させる支持部材を提供することを目的とする。
【解決手段】平面基板Pの形状測定において、前記平面基板Pの下端面27を支持することにより前記平面基板Pを垂直状態に位置決めする支持部材17であって、上方に凸型形状からなる断面と、該断面が一方向に延在する湾曲面形状17bと、を備え、前記支持部材17に設けられた湾曲面形状17bの稜線部と、前記平面基板Pの下端面27の板厚方向略中央部が当接するように載置されることを特徴とする。
(もっと読む)
パターン生成装置及び表面の物理特性を測定するための装置
【課題】パターンを書き込む際に生じるあらゆる物理的変形に無関係に、オブジェクトの表面にパターンを書き込むための方法及びパターン生成装置を提供すること。
【解決手段】本発明は、露光装置での使用を対象とするオブジェクトの表面にパターンを書き込むための方法であって、表面を備えた厚さTのオブジェクトをパターン生成装置のステージの上に配置するステップと、表面を多数の測定ポイントに分割するステップであって、隣接する2つの測定ポイントが所定の最大距離を越えない距離Pで間を隔てられているステップと、各測定ポイントにおける表面の勾配を決定するステップと、各測定ポイントのx−y平面における二次元局部オフセットdを勾配及びオブジェクトの厚さTの関数として計算するステップと、前記表面に書き込むパターンを、二次元局部オフセットdを使用して修正するステップとを含む方法を提供する。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】リソグラフィ装置の高精度変位測定システムを提供する。
【解決手段】放射ビームBを調節するように構成された照明システムILと、パターニングデバイスMAを支持するように構成され、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第一位置決めデバイスPMに接続されたマスク支持構造体MTとを含む。リソグラフィ装置は、基板Wを保持するように構成され、特定のパラメータに従って基板を正確に位置決めするように構成された第二位置決めデバイスPWに接続された基板テーブル(例えばウェーハテーブル)WTも含む。
(もっと読む)
ワイヤ取付具の幾何学的データを決定するための方法および装置
【課題】ワイヤ取付具の幾何学的データを自動的に決定することができる方法および装置を作り出すための解決法を提供する。
【解決手段】ワイヤ取付具の非接触走査のためのこの方法において、ワイヤ取付具は、第1距離センサ14によって、かつ第2距離センサ15によって走査される。第1距離センサ14は、ワイヤ取付具を、この場合はクリンプコンタクト1の導体クリンプ3を、複数回、下から非接触的に走査する目的を果たす。第2距離センサ15は、クリンプコンタクト1の導体クリンプ3を、上から非接触的に走査する目的を果たす。関連するx、y軸を備える測定値から、ワイヤ取付具の幾何学的データが決定される。
(もっと読む)
基板の両面形状測定システム
【課題】 大型・重量化した基板の表面および裏面の両面形状を、作業性に優れ簡便にしかも高精度に測定できる基板の両面形状測定システムを提供する。
【解決手段】 基板の両面形状測定システムは、主要な構成装置として、基板形状測定装置1、基板ハンドリング・ロボット2およびコンピュータ3を備える。基板形状測定装置1は、垂直状態に配置した縦型定盤4と、それに平行に被測定基板Pを保持する基板保持機構5と、変位計走査コラム6とを有し、被測定基板Pの両面形状を同時に測定する。基板ハンドリング・ロボット2は、未測定の被測定基板Pを垂直状態にして上記基板保持機構5に装着し、あるいは測定済みの被測定基板Pを基板保持機構5から取り外す。ここで、基板形状測定装置1および基板ハンドリング・ロボット2は、コンピュータ3により一括制御される。
(もっと読む)
リソグラフィ装置又はその一部を較正又は検定する方法及びデバイス製造方法
【課題】リソグラフィ装置又はその一部を較正又は検定する方法及びデバイス製造方法を提供すること。
【解決手段】リソグラフィ装置又はその一部を検定又は較正する方法において、チョーベネットの判定基準などの所定の客観的判定基準を使用して、視野毎に、又は基板毎に個々に測定ポイントが除外される。
(もっと読む)
超小型電子機構の所望寸法を測定するのに用いられる計測ツールにおける障害を識別する方法、該寸法を測定するのに用いられる計測ツールシステムにおける障害を識別する方法、及び、該システムにおける障害を識別するコンピュータプログラム(計測ツールエラーログ解析方法及びシステム)
【課題】超小型電子機構の所望寸法を測定するのに用いられる計測ツールシステムの障害を識別する方法を提供する。
【解決手段】システムの各計測ツールは超小型電子機構の所望寸法を測定するため、複数のレシピを実行し、各レシピは、超小型電子機構の少なくとも1つの寸法を測定するために一連の命令を含む。システムは、超小型電子機構寸法の測定の際に障害を記憶するエラーログを含む。方法は、計測ツールにより用いられたレシピに対して、正規化された数のエラーを、エラーログに記憶されている障害から決定する工程と、エラーログ内の最大の正規化された数のエラーを有する1つ以上のレシピを識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピを、測定ツールにより実行すべきジョブのリストにて識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピから1つ以上のレシピのエラーの原因を決定する工程とを含む。
(もっと読む)
検査基準設定装置及び方法、並びに、工程検査装置
【課題】工程検査において不良兆候を検出するための検査基準を適切に設定するための技術を提供する。
【解決手段】情報処理装置が、工程検査の各検査項目について抽出された特徴量、及び、最終検査の判定結果を記憶手段に蓄積し、記憶手段に蓄積された複数の製品のデータから、検査項目毎若しくは検査項目の組み合わせ毎に、最終検査で良品と判定された製品群の特徴量の分布と、最終検査で不良品と判定された製品群の特徴量の分布との分離度を算出し、検査項目若しくは検査項目の組み合わせの中から、その分離度の大きさに基づいて、検査基準を再設定すべき検査項目を選択し、選択された検査項目に対して新たな検査基準を設定する。
(もっと読む)
パネル部材検査装置及びそれに適用される位置情報補正プログラム
【課題】
現場での組み立て調整が容易で輸送もでき、その結果として生産場所をも制限されなくなるパネル部材検査装置を提供する。
【解決手段】
矩形板状をなすベース2と、そのベース2上を長手方向に移動可能に設けたパネル載置台3と、前記ベース2上に長手方向と直交して跨るように設けた門型をなすヘッド支持体4と、前記ヘッド支持体4によって長手方向と直交する方向に移動可能に支持させた検査機器支持用ヘッド5とを備えたパネル部材検査装置1において、ベース2とヘッド支持体4との間で2分割可能に構成し、各分割体の大きさを所定以下にできるようにするとともに、ベース2とヘッド支持体4との間に、それらを結合させるときの相対的な位置決めを行う位置決め機構7を設けた。
(もっと読む)
測定部支持機構およびそれを備えた薄板の表面形状測定装置
【課題】 組立て誤差、作動誤差の影響を最小限とする測定部の支持機構およびそれを備えた薄板の表面形状測定装置を提供することを課題とする。
【解決手段】 基台110の両端に立設された垂直移動手段310に対して、水平移動手段320との連結支持として、片側を固定支持し、他方側を水平移動手段320の長手方向あるいは、長手方向と長手方向と直角方向とにフリーとした支持としたことで、離れて平行に立設する垂直移動手段310に組立て上の誤差があっても、その影響を受けずに水平移動手段320を作動させることができ、組立て上の誤差等が測定結果に悪影響を与えることを抑制できる。
(もっと読む)
圧電振動板の周波数測定方法および圧電振動板の周波数分類方法および圧電振動板の周波数測定装置および圧電振動板の周波数分類装置。
【課題】 生産性に優れ、かつ測定における信頼性の高い圧電振動板の周波数測定方法および周波数測定装置を提供するとともに、圧電振動板の周波数分類方法および周波数分類装置を提供する。
【解決手段】 最初に下電極体31〜38の高さを測定し、動作補正情報を得る。その後パーツフィーダ1から第1の移載装置により水晶振動板Qを吸引し、インデックステーブルの搭載ステーションに位置する下電極体31の上面に順次移載する。当該測定ステーションSでは、周波数測定部が設置され、制御部の指示により、先に下電極体31に対する動作補正情報をメモリ71から読み出し、当該動作補正情報に基づく移動距離分上電極体が下電極体に近接する。非接触状態で水晶振動板Qの周波数の測定を行う。そして水晶振動板Qは排出ステーションOから第2の移載装置により収納箱に移載される。
(もっと読む)
位置合わせ方法、位置合わせ装置、露光方法、及び露光装置
【課題】 基板上の位置に応じてスケーリングが異なる場合であっても、基板上の各ショット領域を所定の位置に高精度に位置合わせする。
【解決手段】 ウエハ8上の被露光領域を、ウエハ8の中心を原点とする第1象限Q1〜第4象限Q4の内の2つ含む部分領域px1,px2,py1,py2に分け、各部分領域px1,px2,py1,py2について個別にスケーリング補正値を求める。このスケーリング補正値と、全サンプルショットSA1〜SA9の計測値とを用いてEGA演算を行って、ウエハ8上のショット領域の設計値を実際に位置合わせすべき座標値に変換する変換行列を求める。
(もっと読む)
アラインメント精度評価方法及び装置
【課題】処理対象物に所定の処理を施す処理装置におけるアラインメントの精度を高精度に評価する。
【解決手段】露光ステージ18に装着された基板Fのアラインメントマーク60a〜60dを読み取り、アラインメントマーク60a〜60dを基準として、一定の関係からなる複数の異なるテストパターンを基板Fに繰り返し露光記録し、テストパターン同士の位置関係を比較してアラインメントの精度を評価する。
(もっと読む)
1 - 20 / 30
[ Back to top ]