
Fターム[2F069BB15]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | ウェハー (70)
Fターム[2F069BB15]に分類される特許
1 - 20 / 70
基板の凹部の検査方法および基板のレジスト膜の検査方法
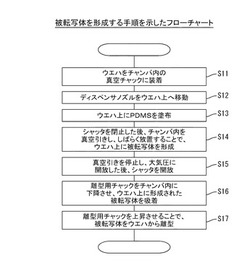
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
複数の設備の相対位置を監視するデバイス

【課題】共通基準システム(4)上に振動隔離機構(2、3、5)を介して搭載され、該共通基準システムに対して変動する位置をとる、リソグラフィ・デバイス(1)及びワークステーション・デバイス(6)を含む装置において、両デバイス間の相対位置の変動を監視して該装置が誤動作しないように調整する。
【解決手段】前記共通基準システムに対する前記リソグラフィ・デバイス及び前記ワークステーション・デバイスの個々の位置を測定する手段と、測定された両デバイスの個々の位置から算出される両デバイス間の相対位置(d、7b)が所定の公差範囲内(7a−7c)にあるかどうかを評価する手段を含む装置。
(もっと読む)
位置決め装置
【課題】バックラッシに起因する位置決め精度の低下を抑えることのできる位置決め装置を提供する。
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
(もっと読む)
ウエハ平坦度測定法
【課題】ウエハの平坦度検査を高精度かつスループットの高い方法で実現する。
【解決手段】回転運動および直線運動機構の運動誤差を補正することの可能な3点法を、ウエハ101と検出器9の相対的な回転運動によるウエハ外周の形状測定と、ウエハ101と検出器9の相対的な直線運動によるウエハ直径方向の形状測定に適用し、両者の組み合わせによりウエハ全体の形状を測定できるようにした。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 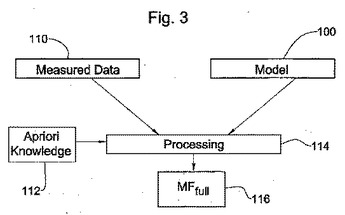 (もっと読む)
(もっと読む)
測定物保持装置及び方法並びに平面度測定装置
【課題】測定物を保持する際に測定物が自重の撓みにより変形されることのない測定物保持装置を提供する。
【解決手段】測定物11の平面度測定に用いられる測定物保持装置20であって、測定物11が載置される載置面11aを有する載置台40と、載置台40に、載置面4002から突出して測定物11を下方から複数箇所で支持し載置面4002からの高さが変更可能に設けられた複数の測定物支持部材60と、各測定物支持部材60が測定物11に対して均一な接触圧力で接するように各測定物支持部材60の載置面4002からの高さを変更する制御手段80とを備える構成にした。
(もっと読む)
測定機器用架台
【課題】折り畳み可能な測定機器用架台を提供して、組み立てを簡単にするだけでなく、輸送スペースをコンパクトにする。
【解決手段】測定機器MUを長手方向に沿って移動させる長尺部材3と、長尺部材3の両端部それぞれに設けられ、長手方向とは異なる方向に長尺部材3を移動させるためのガイドレール71を有する一対の第1枠体4とを備え、長尺部材3の両端部がそれぞれに対応する第1枠体4のガイドレール71に沿って互いに異なる方向に移動して第1枠体4同士の間隔が狭まるように構成されている。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
基板処理装置及び基板搬送方法
【課題】スループットの低下を低減する基板処理装置及び基板搬送方法を提供すること。
【解決手段】基板処理装置は、計測ユニット10と、搬送機構とを備える。計測ユニット10は、基板Wの状態を所定の計測位置Pmで計測する計測器15と、第1のトレイ11と、第2のトレイ12と、所定の計測位置Pmと第1のトレイ11及び第2のトレイ12との間で基板Wを移動させるステージ16とを有する。搬送機構には、基板Wを把持する第1の把持部21及び第2の把持部22を有するロボットハンド25が設けられている。第1のトレイ11に基板Wを載置したロボットハンド25が計測ユニット10から出ずに計測後の基板Wを計測ユニット10の外に取り出すことで、計測ユニット10に対する1回のアクセスで計測前後の基板Wを入れ替えることができてスループットの低下を低減することができる。
(もっと読む)
リソグラフィ装置、及びリソグラフィ工程で使用するパターニングデバイス
【課題】 パターニングデバイスとパターニングデバイス支持体との間のずれが考慮されるリソグラフィ装置のパターニングデバイスに位置測定システムを提供する。
【解決手段】 本発明は、放射ビームを調整するように構成された照明システムと、放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持するように構成されたパターニングデバイス支持体と、基板を保持するように構成された基板支持体と、パターン付放射ビームを基板のターゲット部分に投影するように構成された投影システムと、少なくとも基板のターゲット部分へのパターン付放射ビームの投影の間、パターニングデバイス上に提供されたグリッド又は格子を用いてパターニングデバイス支持体上に支持されたパターニングデバイスの位置量を連続して決定するように構成されたエンコーダタイプの測定システムとを含むリソグラフィ装置に関する。
(もっと読む)
表面形状測定装置および測定方法
【課題】 走査型プローブ顕微鏡を用いた表面形状の測定において、帯電の影響を排除すると同時に、活性な被測定物の表面を変化させることなく安定に測定する装置及び測定手法を提供する。
【解決手段】 走査型プローブ顕微鏡100は被測定試料101の表面を走査する測定用探針104aを有しており、少なくとも被測定試料101の測定範囲にわたり、被測定試料101の表面と測定用探針104aの間に溶液102が設けられている。
溶液102は被測定試料101の表面および測定用探針104aが帯電しないようにし、かつ、被測定試料101の表面に自然酸化膜、有機物などが成長、吸着しないようにするためのもであり、例えばイソプロピルアルコール(IPA)が挙げられるが、溶液の代わりに上記の要件を満足するような物性を有する気体を用いてもよい。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
表面形状測定装置及び露光装置
【課題】単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供する。
【解決手段】表面形状測定装置は、光源からの白色光をモスアイ形状の反射防止部を有するプリズムを用いて基板と参照面に80度以上の入射角で入射させ、白色干渉光を得る。波長選択が可能な光学フィルターを用いて白色干渉光を複数の単一光による干渉光に分解する。その複数の干渉光に対して高速フーリエ変換を行いパワースペクトル分布を求め、スペクトルのピーク位置情報を用いて基板の表面形状を測定する。
(もっと読む)
ウェーハ平坦度計測方法、ウェーハ平坦度計測装置および計測データ処理装置
【課題】CMP工程の状態を管理する上で、より有用で、より精度の高いウェーハの平坦度を取得する方法の提供。
【解決手段】計測データ処理装置10は、集積回路のマスク形状データに基づきCMP工程で生じる可能性のある窪み部の位置を予測し(窪みデータ生成部102)、その窪み部の上層で生じる可能性のある欠陥の位置を予測し(欠陥候補位置抽出部102)、欠陥のあることが予測される窪み部の中から、AFM20が表面形状データを取得すべき計測位置を決定し(計測位置決定部103)、その計測位置データを付して、AFM20に表面形状データの取得を指示する(表面形状データ取得部104)。また、計測データ処理装置10は、AFM20により計測された表面形状データを、AFM20から取得し(表面形状データ取得部104)、表示装置40に表示する(表示部105)。
(もっと読む)
データ解析装置
【課題】
CD-SEM画像からパターンのエッジを抽出する際にパターン上における高さ(基板からの距離を表す値)を指定してエッジ点を抽出する。あるいは、それを行って得られるLER値やLERのフーリエスペクトルを得る。
【解決手段】
あらかじめ同じサンプルをAFMとCD-SEMとで観察しておき(601)、AFM観察結果から、高さを指定して得られるLERの大きさやLERの自己相関距離あるいはスペクトルという指標を求め、さらにCD-SEM観察結果からは、エッジ点を検出する画像処理条件を指定して得られるこれらの指標を求め(602)、値が一致するときにその値を与える高さと画像処理条件とが対応していると判断し(603)、以降、AFM観察の代わりにCD-SEM画像からこの画像処理条件を用いてエッジ点を抽出する。
(もっと読む)
位置決定用測定装置のXYテーブル
XYテーブルは、固定基準部分(B)と、該基準部分(B)に対して相対的に第1の方向(Y)に移動可能に保持されている中間部分(F)と、該中間部分(F)に対して相対的に第2の方向(X)に移動可能に保持されている物体(O)とを含む。この場合、処理されるべき部品(W)が物体(O)又は基準部分(B)上に配置される。さらに、第1の方向(Y)に対して、基準部分(B)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M1、M2)と、第2の方向(X)に対して、物体(O)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M3、M4)とを含む。これにより、部品(W)又は物体(O)におけるツール中心点(TCP)の位置(Xo、Yo)が測定可能である。1Dプラスエンコーダ(M1、M2、M3、M4)は、第1及び第2(Y、X)の方向に広がる平面であってツール中心点(TCP)を含む平面内へのそれらの投影が、XYテーブルの全走行領域内で部品(W)の外側に存在するように配置されている。これにより、アッベ(Abbe)条件が満足されるので、簡単な1Dプラスエンコーダを用いて物体(O)におけるツール中心点(TCP)の正確な測定を可能にする。 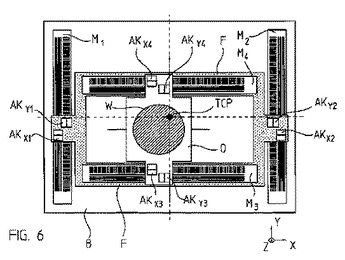 (もっと読む)
(もっと読む)
研削装置
【課題】被加工物の被研削面に傷を付けることなく所定の厚さに研削することができる研削装置を提供する。
【解決手段】チャックテーブルに保持された被加工物の上面を研削するものであって、制御手段は、接触式の厚み計測器によって被加工物の加工前の厚み(T1)を計測する第1の加工前の厚み計測工程と、非接触式の厚み計測器によって被加工物の加工前の厚み(T2)を計測する第2の加工前の厚み計測工程と、被加工物の加工前の厚み(T1)と(T2)に基づいて非接触式の厚み計測器による計測値を補正する補正値(T1/T2)を求める補正値演算工程と該非接触式の厚み計測器を作動してチャックテーブルの保持面に保持された被加工物の厚みを計測しつつ研削手段を作動して被加工物を研削する研削工程と、非接触式の厚み計測器によって計測された被加工物の厚み(T0)に補正値(T1/T2)を乗算した値が所定値に達したら研削手段による研削を終了する研削終了工程を実行する。
(もっと読む)
近接露光装置及び基板の製造方法
【課題】1軸方向にのみ移動可能なワークステージを備える簡素な機構の近接露光装置において、ワークステージに搭載された基板の平坦度を2次元で精度よく測定することができる近接露光装置を提供する。
【解決手段】基板Wを保持して一軸方向(例えば、X方向)に移動可能なワークステージ1と、マスクステージ2上に配置されてセンサ駆動機構47によりワークステージ1の移動方向と直交する方向(例えば、Y方向)に移動されるギャップセンサ40とを備え、ワークステージ1及びギャップセンサ40を互いに直交する方向に移動させて基板Wの平坦度を2次元で測定する。
(もっと読む)
基板測定用ステージ
【課題】支持ピン3の位置再現性を向上させること、及び載置板2と支持ピン3間の移載において基板Wの水平方向のずれを防止することである。
【解決手段】基板Wの反りを測定する反り測定系7、及び当該基板Wの反り以外の物理量又は化学量を測定する通常測定系6に用いられる基板測定用ステージ1であって、前記通常測定系6の通常測定位置P1、及びその通常測定位置P1から下方に離間した退避位置P2の間を移動可能な載置板2と、前記載置板2に設けられた貫通孔21に挿通可能であり、前記反り測定系7の反り測定位置P3に固定された複数の支持ピン3と、前記載置板2を前記通常測定位置P1及び前記退避位置P2の間で昇降移動させる駆動機構と、を備え、前記反り測定位置P3が、前記通常測定位置P1及び退避位置P2の間に設定されている。
(もっと読む)
1 - 20 / 70
[ Back to top ]