
Fターム[2F069NN16]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 近似式を求めるもの (241)
Fターム[2F069NN16]の下位に属するFターム
Fターム[2F069NN16]に分類される特許
1 - 20 / 147
形状評価方法、形状評価装置、プログラム及び記録媒体
形状評価方法、形状評価装置、プログラム及び記録媒体
タイヤ摩耗予測方法及びタイヤ摩耗予測装置
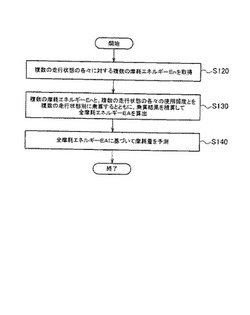
【課題】航空機に用いられるタイヤの摩耗量を高精度に予測することが可能なタイヤ摩耗予測方法及びタイヤ摩耗予測装置を提供する。
【解決手段】 タイヤ摩耗予測方法は、航空機に用いられるタイヤの摩耗量を予測する。タイヤ摩耗予測方法は、使用条件に応じて区分けされた複数の走行状態の各々に対応する複数の摩耗エネルギーEnを取得するステップAと、前記複数の摩耗エネルギーEnと、前記複数の走行状態の各々の使用頻度とを前記複数の走行状態別に乗算するとともに、乗算結果を積算してタイヤに蓄積される全摩耗エネルギーEAを算出するステップBと、前記全摩耗エネルギーEAに基づいて、前記航空機用タイヤの摩耗量を算出するステップCとを含む。
(もっと読む)
状態検出装置、電子機器及びプログラム

【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
鋼線長さの評価方法、鋼線の巻取方法および巻取製品
【課題】複数本にて引き揃えられた鋼線の束を構成する各鋼線の長さを、簡易にかつ正確に評価することができる鋼線長さの評価方法を提供する。また、この評価方法を用いることで、複数本の鋼線を誤差の少ないほぼ同一の長さで巻き取ることができる鋼線の巻取方法、および、これにより得られる巻取製品を提供する。
【解決手段】複数本にて引き揃えられた鋼線の束10を構成する各鋼線1の長さを評価する方法である。鋼線束10を、水平方向距離Sの間隔を有しかつ同じ高さに位置する2つの支持点X−Y間に掛け渡した状態で、鋼線束の一端を固定して他端に一定の張力を掛けたときの各鋼線のなす曲線の最低高さと支持点の高さとの差dを計測して、得られた計測値dに基づき、2つの支持点間における各鋼線の長さLを算出する。
(もっと読む)
路面凹凸評価システム
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
接触面形状測定装置
【課題】柔軟な物体同士の接触面の形状をより正確に測定できる測定装置を提供することを目的とする。
【解決手段】本発明にかかる接触面形状測定装置100は、柔軟な物体102、104同士の接触面106の形状を測定する測定装置において、接触面に沿って配置される柔軟性を有する基板108と、基板に貼付され貼付位置での基板の歪量を測定する2つ以上の歪センサ110と、歪量に基づいて曲率を算出し、該曲率に基づいて、2つ以上の歪センサが貼付された経路に沿った接触面の形状を近似した曲線を算出する形状近似部120と、基板上の経路に配置され配置位置での基板の傾斜角を測定する少なくとも2つの加速度センサ112と、いずれかの加速度センサの配置位置における近似した曲線の接線角と測定した傾斜角との差分を算出する比較部122と、差分が所定の値以内に収まるように、近似した曲線を補正する補正部124とを備えることを特徴とする。
(もっと読む)
形状評価方法、形状評価装置、プログラム及び記録媒体
【課題】輪帯面と壁面とが交互に連続して形成された被測定面であっても、フィッティング精度を向上させることを目的とする。
【解決手段】複数の点データを列毎にグループ化して複数の点列データを生成する(S102)。点列データ毎に走査軌跡面関数をそれぞれ求める(S103)。複数の点データの中から各輪帯面のデータと見做せる点データを各輪帯面に対応して抽出し、得られた抽出データ毎に、その抽出データを関数近似して輪帯面を示す輪帯面関数をそれぞれ求める(S104)。設計データに基づいて壁面関数をそれぞれ求める(S105)。各面関数が交差する各々の交点データを求める(S106)。参照データと交点データとをフィッティングさせる座標変換パラメータを求める(S107)。座標変換パラメータで各点データを座標変換する(S108)。座標変換した点データと被測定面の設計データとの差分を求める(S110)。
(もっと読む)
多関節型座標測定装置
【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
形状計測方法
【課題】三次元計測器によって計測した点群データから計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを生成する。
【解決手段】計測点群データに基づいて計測対象物の表面形状を表すサーフェイスを陰関数として作成する工程と、サーフェイスが存在する計測領域全体を三次元ドロネー図による分割処理により隙間なく、重複なく埋め尽くされた四面体の小領域(以下、セルという)に分割する工程と、セルの各頂点をサーフェイスの内側に存在する内点5と、外側に存在する外点6とに分類する工程と、境界セルを抽出する工程と、境界セルとサーフェイスとの交点7を計算する工程と、各境界セルが持つ交点7を繋ぎ合わせることにより三角形又は四角形の面を求める工程と、全ての面を結合する工程とを含むので、計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを自動的に作成することができる。
(もっと読む)
形状測定方法、これを用いた加工方法、および形状測定装置
【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
機械角度測定装置
【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
落下岩塊の大きさの推定方法及び対策工の決定方法
【課題】上端部が岩盤に保持され、且つ節理を有する柱形状の岩塊に対して、安定性の定量的な評価を適切に行う。
【解決手段】節理10によって柱形状を有する岩塊20の引張強さと密度をそれぞれ測定する。測定された引張強さと密度に基づき、下記式(1)を用いて、岩盤11から落下する岩塊20の軸方向の長さを算出する。
Le=St/(ρg・sinθ)・・・・(1)
但し、Le:岩盤11から落下する岩塊20の軸方向の長さ、St:岩塊20の引張強さ、ρ:岩塊20の密度、g:重力加速度、θ:水平方向に対する岩塊20の軸方向の傾斜角度
(もっと読む)
車輪径を調整する方法及び装置
【課題】
車輪径を調整するための方法及び装置を提供する。
【解決手段】
本方法は、現車輪径分布ベクトルを入手するステップと、前記現車輪径分布ベクトルの潜在的磨耗率を決定するために前記現車輪径分布ベクトルと既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、候補目標車輪径分布ベクトルの潜在的磨耗率を決定するために前記候補目標車輪径分布ベクトルと前記既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、前記現車輪径分布ベクトルを目標車輪径分布ベクトルに切り替えることによって得られる潜在的磨耗率の減少が所定の条件に適合するように前記候補目標車輪径分布ベクトルから前記目標車輪径分布ベクトルを選択するステップとを含む。本発明の解決方法により、車輪径分布ベクトルの変更を通して、将来の潜在的磨耗率及び列車の保守整備時に必要な研削の量を最適化することができる。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
1 - 20 / 147
[ Back to top ]