
Fターム[2F069NN16]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 近似式を求めるもの (241)
Fターム[2F069NN16]の下位に属するFターム
Fターム[2F069NN16]に分類される特許
21 - 40 / 147
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
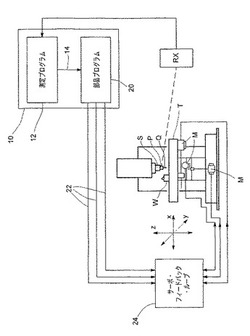
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
測定用長尺状物の位置決め治具

【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定する際に使用する被測定物用位置決め治具の提供。
【解決手段】 位置決め治具7は、案内レール8a上をx軸方向に移動可能な基台8b上面の一方の端面近くに、ベース8cを設け、その上の一方の端にキネマカップリング機構9aを、他方の端に高さ位置調整機構9bとチルト機構9cを設けた。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
タイヤ半径測定装置、タイヤ半径の変位測定方法及び車輪
【課題】タイヤ半径を高精度に測定する。
【解決手段】シート状の第1の磁石11、第2の磁石21をトレッド部2の内周面側に貼り付け、第1の磁気検出素子12、第2の磁気検出素子22を、磁石11、21と対向させてリムウェル部4に設ける。磁気検出素子12、22毎にその測定値について、変位が生じる前の、出荷時等といった基準状態における基準測定値Mr1、Mr2に対する測定値の変位を演算する。変位が最大となる測定値は、接地面からの影響を受けている可能性があると判断し、この測定値を除く他の測定値のみを、トレッド部2とリムウェル部4の間の距離を表すタイヤ半径相当値RRとし、このタイヤ半径相当値RRに、タイヤ中心からリムウェル部4までの距離などを表す予め検出した定数を加算してタイヤ半径Rを演算する。
(もっと読む)
鋼管部材の内面めっきの腐食量推定方法
【課題】極めて簡単かつ低コストで測定して、当該測定結果から定量的に腐食速度を求め、さらにn年後の腐食量を推定することができる鋼管部材の内面めっきの腐食量推定方法を提供する。
【解決手段】ある期間毎に鋼管部材全体の厚さ及び外面めっき層の厚さを測定し、これを少なくとも4〜5回行い、各回の測定時の鋼管部材全体の厚さの測定値Aから外面めっきの厚さの測定値Bを減じた値を算出してこれを算出値Cとし、第2回以降の各回の測定時に算出した算出値Cnから第1回の測定時に算出した算出値C1を減じた値が第1回の測定時に対する第2回以降の測定時の内面めっき厚の減少値でありこの絶対値Dnを第2回以降の各回の腐食量とし、これらの腐食量から腐食速度を統計的処理により算出又は推定し、n年後の腐食量を求める。
(もっと読む)
斜面安定化システム
【課題】現斜面の状況に応じて簡易な対策工を施して、斜面崩壊の発生の恐れを僅かでも少なくするとともに、斜面崩壊が発生した場合の被害を最小限にとどめることを可能にし、また、斜面崩壊の可能性が高まった時に住民が適切な対応をすることを可能にする斜面安定化システムを提供する。
【解決手段】土塊の移動に伴って抵抗力を発揮して斜面の不安定な土塊の移動の程度を小さくすることが可能な斜面安定化構造体を斜面に施工する。この場合、1.0超、1.2未満の安全率Fsにて施工する。斜面安定化構造体を構成する斜面安定化部材体に変位センサを取り付け、当該斜面の土塊が移動した時に前記変位センサが検知した信号に基づいて危険度信号を発信する危険度信号発信手段を設け、この危険度信号発信部の発信情報を受信する危険度信号受信手段を設ける。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 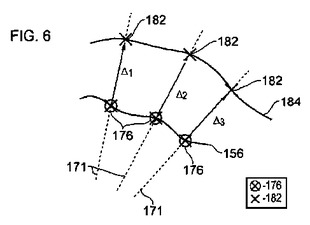 (もっと読む)
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 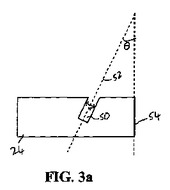 (もっと読む)
(もっと読む)
物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法
【課題】本発明は、物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法に関し、物体の三次元の表面形状を評価するうえでその表面に形成される反射歪みの定量的な検出を可能にすることにある。
【解決手段】対象物体の三次元の表面形状のデータを取得させると共に、その取得された表面形状のデータの2次微分値を算出させる。また、対象物体に要求される三次元の仮想形状データを算出させると共に、その算出された仮想形状データの2次微分値を算出させる。そして、その算出された対象物体の三次元の表面形状の2次微分値と、仮想形状データの2次微分値との差を算出させ、その差に基づいて、対象物体の表面形状を評価させる。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
レール車両の、少なくとも一つの輪軸を有している台車の状態を監視するための方法
本発明は、レール車両の、少なくとも一つの輪軸(4)を有している台車(3)の状態を監視するための方法に関する。本方法では、輪軸(4)の車輪(8)は軸(6)によって固く結合されており、且つ、ほぼ円錐形の車輪輪郭を有しており、台車に配置されているセンサ手段(10)から供給される信号から、車輪(8)の円錐形の車輪輪郭を基礎としている、台車(3)の輪軸(4)の蛇行動に対応する信号がフィルタリングされて取り出され、蛇行動の周波数(f)が、その都度存在している車両速度(v)のような周囲条件を基準にして求められ、蛇行動の周波数(f)に関して記憶されている、存在している周囲条件に対して典型的な値又は値領域と比較され、測定された前記周波数(f)の、該周波数(f)に関して記憶されている値又は値領域からの偏差が監視される。 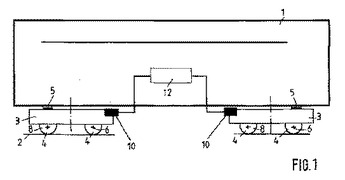 (もっと読む)
(もっと読む)
円筒形回転装置を測定して位置合わせする方法
本発明は、例えばキルンやドラムなどの円筒形又は他の回転対称形の回転装置を測定して位置合わせするための方法に関する。測定及び位置合わせの対象となる装置は、シェルと、少なくとも1つの支持リングとを有する。本発明による方法に関して重要なのは、回転装置が作動状態で回転しているときに、回転物体のシェルの表面上測定点が、同じ円周ライン上において、各支持リングの軸線方向両側で測定されることである。測定された点から回帰円が計算され、計算された円の中心点が決定され、各支持リングの両側で計算された円の中心点の間の直線とその中心点が決定される。シェルの中心線の基準直線が計算され、決定されたシェルの中心点を、計算された基準線へ移動させることによって、物体のシェルが真直ぐになるように位置合わせされる。  (もっと読む)
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
ケーブルの移動解析装置
【課題】ケーブルの移動力を簡易かつ短時間に求めることができるケーブルの移動解析装置を提供すること。
【解決手段】車両が上部を通過する地盤内の管路に敷設されたケーブルの水平方向の移動を解析する装置であって、車両が通過する際の地盤の振動解析を行って車両の移動に伴うケーブル近傍部分の土壌粒子の水平速度を求め、該水平速度と車両の水平方向位置との関係をもとに、車両の進行方向に向かって、車両の進行方向に速度成分を有する第1前進区間と車両の進行方向とは逆方向に速度成分を有する後進区間と再び車両の進行方向に速度成分を有する第2前進区間との各移動距離を少なくとも算出する振動解析部21と、各区間毎に、ケーブルの単位長さあたりの重量と管路に対するケーブルの摩擦係数と各区間の移動距離とを乗算した区間移動力を求め、各区間移動力をベクトル演算した値をケーブルにかかる移動力として算出する移動力解析部22と、を備える。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
機械の誤差同定方法およびプログラム
【課題】2つ以上の並進軸と1つ以上の回転軸を有する機械において、回転軸に関する幾何誤差と並進軸に関する幾何誤差とをほぼ同時に同定する。
【解決手段】回転軸であるC軸等を複数角度に割り出してターゲット球12を複数箇所に位置決めし、位置計測センサによりターゲット球12の3次元空間上の中心位置を計測し、計測された複数の中心位置計測値を円弧近似し、近似された円弧の1次もしくは2次成分等からC軸等の中心位置の誤差および傾き誤差並びに並進軸であるX軸,Y軸等の傾き誤差を算出する。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
形状検査装置および形状検査方法
【課題】被検査体が所定の形状および寸法よりもわずかでも小さい場合には寸法不足を確実に検出して欠陥であると判定できる形状検査装置および形状検査方法を提供すること。
【解決手段】被検査体であるスパイダの素形材2の突起部22,23の形状を測定してその断面形状を示す「形状データ」を作成し、作成した「形状データ」からスパイダの素形材2の突起部22,23の軸線方向の全長にわたって最も外側に位置する部分の抽出することにより得られる形状を「基準形状」としてこの「基準形状」をデータ化した「基準形状データ」を作成し、「基準形状データ」と「形状データ」との差分を算出し、算出した差分に基づいてスパイダの素形材2の突起部22,23に欠陥があるかを判定する。
(もっと読む)
21 - 40 / 147
[ Back to top ]