
Fターム[2F069QQ08]の内容
測定手段を特定しない測長装置 (16,435) | 表示 (337) | 表示手段 (95) | 液晶 (20)
Fターム[2F069QQ08]に分類される特許
1 - 20 / 20
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
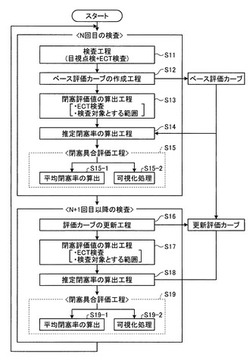
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
改良された関節式アーム

【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有す座標計測装置(CMM)を提供すること。
【解決手段】関節式アームCMMは、複数の伝達部材20と、少なくとも2つの伝達部材を互いに接続する複数の関節部材35と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
インテリジェントな繰返し精度の良いアーム取り付けシステム
例示的な実施形態は、可搬型の関節アーム座標測定機であって、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、関節アーム座標測定機の第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路と、第2の端部に結合された基部と、基部に配置された上側取付け部と、取り付け構造に固定され、上側取付け部に繰返し精度良く接続するように構成された下側取付け部と、下側取付け部を識別する識別子情報を電子回路に送信するように構成された電子的識別システムとを含む、関節アーム座標測定機を含む。 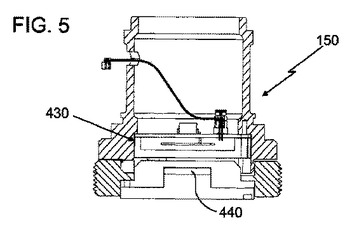 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 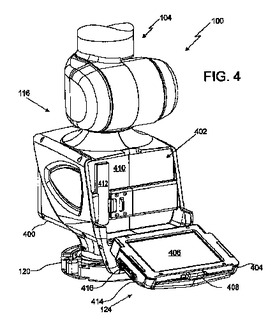 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 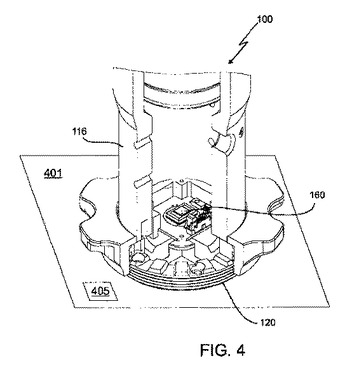 (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 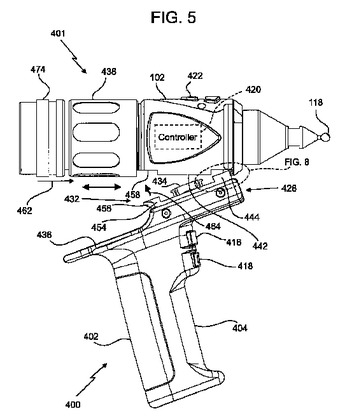 (もっと読む)
(もっと読む)
操作性や使い勝手の良いマイクロメータ装置
【課題】操作性や使い勝手に優れたマイクロメータ装置を提供する。
【解決手段】測定子9を用いて微少変位を測定するマイクロメータ装置28において液晶表示装置又は有機EL表示装置からなる表示装置22に操作プログラムや測定結果を分り易く表示し、また独立な機能をもつ多数のキーからなる操作パネル24を備えることで入力操作が簡単に行える。更にマイクロメータ装置を何台並べる多連測定において測定条件が同一の場合、測定条件転送手段20により1台目29の測定条件を2台目以降28,30に一括に転送することで各本体の測定条件の入力が効率的になる。
(もっと読む)
ステージシステム及びステージシステムの補正方法
【課題】ステージの左右の歪みを短時間で補正する。
【解決手段】互いに平行となるように離間配置し、移動体2の対向する面に配された一対のガイド軸22,32と、ガイド軸22,32のうち一方のガイド軸22に設けられ移動体2の一側部2aを一方のガイド軸22に沿って移動させる第1の搬送機構20と、ガイド軸22,32のうち他方のガイド軸32に設けられ移動体2の他側部2bを他方のガイド軸32に沿って移動させる第2の搬送機構30と、移動体2の一側部2aを一方のガイド軸22に沿って基準位置まで移動させたとき、移動体2の他側部2bの所定位置からのずれ量を検出する検出部40とを備える。
(もっと読む)
検出装置
【課題】使用者が使い易く、安価で小型化された変位計などの検出装置を提供する。
【解決手段】7セグメントLED42は、対象物の測定値等を表示する。バー表示部43は、測定値が許容範囲のどの位置に入っているかという入り度合いを表示する発光ダイオード(LED)等からなる複数のバー(セグメント)43a、上限値表示部43b、および下限値表示部43cを含む。使用者により設定された許容範囲の上限値および下限値から、使用者が暗に望むある程度の分解能を予測することができる。そこで、本発明では、各バー43aの分解能を、(上限値−下限値)/個数により定義する。なお、上記個数とは、上限値表示部43bと下限値表示部43cとの間にあるバー43aの個数を示す。
(もっと読む)
プローブ観察装置、表面性状測定装置
【課題】簡便な操作でプローブを高精度に観察できるプローブ観察装置を提供する。
【解決手段】プローブ210を撮像するカメラ230と、カメラ230にて取得した画像データを画像処理する画像処理部と、画像処理部にて画像処理された画像データを表示するモニタ400と、手動操作にて画像処理内容を入力指令するマウス500とを備える。画像処理部は、マウスにて入力される指令に応じて画像データを加工処理する画像データ加工処理部を備える。カメラ230は、低倍率のレンズ系を有し、プローブ210を視野内に入れた状態でプローブ210に対する相対位置が固定された状態で設けられている。
(もっと読む)
光記録媒体における記録マーク測定方法及び装置
【課題】光記録媒体でのV溝形状のグルーブと、ここに形成された記録マークとの位置関係及び記録マークの形状を精密に測定する。
【解決手段】V溝形状のグルーブを有する光記録媒体に記録マークを形成しておき、これを、記録マーク測定装置50における走査型プローブ顕微鏡52をAFMモードとしてプローブにより走査し、得られた凹凸像の信号から、V溝の底部のみを残すデータ処理を施して、グルーブ底部強調凹凸像を得て、このグルーブ底部強調凹凸像と検出電流により得られたコンダクティブAFM像とを合成して、グルーブ底部と記録マークとの位置関係を測定する。
(もっと読む)
寸法測定システム、寸法測定装置及びマスタ
【課題】 マスタを間違えた誤った校正処理を防止できる寸法測定システムの実現。
【解決手段】 寸法測定装置10と、所定の寸法値の部分を有する複数のマスタ50A,50Bとを備え、所定の寸法値の部分を測定して寸法測定装置を校正する寸法測定システムであって、各マスタは、寸法測定装置がマスタの所定の寸法値の部分を測定する状態にあることを検出する測定状態検出手段55と、寸法測定装置が所定の寸法値の部分を測定する状態にあることを検出したことを示す測定状態信号を送信する無線通信手段とを備え、寸法測定装置は、測定状態信号を受信する無線通信手段37を備え、無線通信手段が測定状態信号を受信している時に校正処理を行う。
(もっと読む)
検査装置及び検査方法
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
寸法測定装置
【課題】 高価な表示装置を共通に使用しても操作性が低下しない寸法測定装置の実現。
【解決手段】 複数の寸法測定値を生成する複数の寸法測定部15-1,15-4;16-1,16-4と、複数の寸法測定部の生成する寸法測定値を表示する表示部11とを備える寸法測定装置であって、表示部が同時に表示できる寸法測定値の個数は、複数の寸法測定部の生成する寸法測定値の個数より少なく、表示部に表示する寸法測定値を、複数の寸法測定部の生成する寸法測定値に応じて自動的に選択する表示制御部を備える。
(もっと読む)
寸法測定システム
【課題】 携帯型測定部を無線通信不能な場所でも使用可能にした寸法測定システムの実現。
【解決手段】 端末無線装置42、寸法測定値を生成する寸法測定部21、及び寸法測定値を表示する表示器24を有する携帯型寸法測定装置16-1,16-2,16-3,16-4と、ベース無線装置35を有するベース装置10とを備え、携帯型寸法測定装置は、生成した寸法測定値をベース装置10に送信する寸法測定システムであって、携帯型寸法測定装置は、端末無線装置がベース無線装置に対して通信可能であるかを検出する無線通信状態検出回路を備え、通信不能状態の時には、寸法測定値をベース装置に送信する動作を自動的に停止すると共に寸法測定値を表示器に表示するようにし、通信可能状態になった時に、生成した寸法測定値をベース装置に送信する動作を自動的に再開する。
(もっと読む)
電線の弛度測定方法および装置
【課題】大がかりな設備を要することなく容易に電線の弛度を測定できる電線の弛度測定方法および装置を提供すること。
【解決手段】第1、2の支持点i,jの第1および第2のカテナリー角α,βを測定する第1、第2の角度検出手段11,12と、各データを入力する入力手段13と、カテナリー曲線を表す式を積分して求めた計算式に、α,βの測定値および電線の長さLの推定値等の各データを代入し演算して長さLの計算値を求める第1の演算手段14と、計算値と推定値を比較して、両値が予め設定された精度で一致する否かを判定する判定手段14と、一致すれば、推定値を長さLの測定値と決定する決定手段14と、α,β、長さLの測定値に基づいて電線の弛度を演算する第2の演算手段14とを備え、判定手段14で一致しなければ一致するまで、計算値を推定値として計算式に代入して再度第1の演算手段14による演算と判定手段14による判定を繰り返す。
(もっと読む)
タイヤ状態判定装置
【課題】車両停止時において簡易にタイヤ状態を判定できるタイヤ状態判定装置を提供することを目的とする。
【解決手段】タイヤ10a〜10dが装着された車両Aのタイヤ状態を判定するタイヤ状態判定装置であって、タイヤ10a〜10dに駆動力を付加するインホイールモータ2と、車両Aが停止した状態でタイヤに付加される駆動力とその駆動力によるタイヤの回転角との相関関係の変化に基づいてタイヤ状態を判定する判定手段とを備える。
(もっと読む)
圧接端子の圧接時の幅測定方法及び装置
【課題】電線を圧接刃間に圧入した圧接端子の幅を正確に測定できる圧接端子の圧接時の幅測定方法及び装置を提供する。
【解決手段】圧接端子の圧接時の幅測定装置は発光する発光部と発光部からの光を受光して撮像する撮像部と発光部と撮像部との間に設けられた端子取付部を備えている。圧接端子は表面上に電線を位置付ける底壁と一対の側壁と圧接刃とを備えている。側壁は底壁の両縁から立設している。端子取付部は圧接端子を取り付ける。ステップS1で発光部の光軸と撮像部の光軸とを合わせる。ステップS2では端子取付部に取り付けられた圧接端子を撮像する。ステップS3では2値化する。ステップS4ではエッジを抽出する。ステップS5では圧接端子に圧接された電線の中心を求める。ステップS6では中心を通りかつ圧接端子の底壁に表面に沿う方向の一対の側壁の外面間の距離を求める。
(もっと読む)
1 - 20 / 20
[ Back to top ]