
Fターム[2F103EB16]の内容
Fターム[2F103EB16]に分類される特許
61 - 80 / 498
光電式エンコーダ及びそのアライメント調整方法
【課題】検出ヘッドのアライメント調整が容易な光電式エンコーダ及びそのアライメント調整方法を提供する。
【解決手段】光電式エンコーダは、測定軸方向に所定ピッチで回折格子が形成されたスケールと、このスケールに対して相対移動可能に配置され、スケールに光を照射する照射部、並びにスケールの回折格子で反射または透過された光を、それぞれ異なる位相において受光する複数の受光部を備えた検出ヘッドと、この検出ヘッドの受光部からの受光信号を処理して2相信号を生成する信号処理装置とを備える。信号処理装置は、2相信号のリサージュ半径に対応したアライメント調整用のモニタ信号を算出することで、前記スケールに対して前記検出ヘッドを静止させた状態で該検出ヘッドのアライメント調整を可能とする。
(もっと読む)
エンコーダ、光学モジュール及びサーボシステム

【課題】検出精度を向上させることができるエンコーダ、光学モジュール及びサーボシステムを提供すること。
【解決手段】複数の反射スリットが測定軸に沿って並べられたスリットアレイSA1,SA2と、スリットアレイの一部に対向し測定軸C上で相対移動可能な光学モジュール130とを備え、光学モジュールは、スリットアレイに光を照射する点光源131と、スリットアレイと平行な面内において測定軸と垂直な幅R方向で点光源に対してオフセットした位置に配置され、点光源から照射されて反射スリットで反射された反射光をそれぞれ受光する複数の受光素子が測定軸に沿って並べられた受光アレイPA1,PA2とを有し、複数の受光素子は、測定軸方向で点光源に近い受光素子ほど幅方向の長さが短い形状をそれぞれ有し、幅方向における点光源と反対側の端部Enが測定軸に沿った位置になるように並べられる。
(もっと読む)
エンコーダ、モータユニット、及びアクチュエータシステム
【課題】高い信頼性を維持しつつ、小型で、製造コストの低いエンコーダ等を提供する。
【解決手段】エンコーダユニット40は、主動歯車50と、主動歯車50に噛み合っている従動歯車60、70とに形成された光学トラック54,64,74それぞれからの光に基づいて、シャフト30の回転数を検出する。したがって、いずれの従動歯車60、70も主動歯車50に直接噛み合っていることから、歯車のバックラッシュの累積等による信頼性の低下を防ぐことができるとともに、エンコーダユニット40及びモータユニット10を小型にできる。
(もっと読む)
光学式エンコーダ
【課題】簡単な構成で、回転体の相対回転角および絶対回転角を検出することができる光学式エンコーダを提供する。
【解決手段】相対回転角検出部22は、相対回転角検出用受光部20からの出力信号を受けて、コードホイール1の透過領域としての光オン部11a,11bおよび遮断領域としての光オフ部12からの光量の相違に基づいて、コードホイール1の相対回転角を検出する。一方、絶対回転角検出部23は、絶対回転角検出用受光部21からの出力信号を受けて、コードホイール1の第1の領域としての第1光オン部11aおよび第2の領域としての第2光オン部11bからの光量の相違に基づいて、コードホイール1の絶対回転角を検出する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】格子プレートの位置測定システムに干渉する汚染物により誤った測定が行われる可能性が低減された液浸リソグラフィ装置を提供する。
【解決手段】装置は、バリア100が使用され、汚染物(例えば、液滴及び/又は微粒子)は格子50又はセンサ20に接触することが防止される。バリア100に付着するいかなる汚染物も放射源からの放射ビームが格子50上で合焦する焦点面から十分に遠いように配置されているので、汚染物は測定に干渉しない。ある実施形態では、表面弾性波を用いて格子50又はセンサ20の表面から汚染物が除去される。
(もっと読む)
光学式エンコーダおよびその読取ヘッド
【課題】経済的で頑丈であるとともに設置しやすく高分解能な光学式エンコーダおよびその読取ヘッドを提供すること。
【解決手段】2つの部材間の相対位置を測定する光学式エンコーダは、スケール格子と、この格子を照らす第1波長光源を備える読取ヘッドとを備える。格子はスケール光を出力し、変位する周期的強度パターンを第1波長で形成する。読取ヘッドは複数の空間位相検出器を備え、空間位相検出器は、周期的な空間フィルタと、第1波長周期的強度パターンから生じる光を受光し、第2波長光を出力する蛍光体層と、この第2波長光を受光・感知する光検出素子とを備える。光検出素子は、第1波長周期的強度パターンの空間フィルタ処理後のパターンに対応する第2波長光を受光し、当該空間位相検出器に対する空間位相を示す信号を出力する。
(もっと読む)
光学式位置測定装置
【課題】偏光コード化されて位相のずれた走査検知信号を生成し、そして出来るだけ簡単に構成されている光学式位置測定装置を提供する。
【解決手段】少なくとも一つの測定方向に沿って互いに相対的に可動で配設されている基準尺と走査検知プレートの、相対位置を検出するための光学式位置測定装置に関するものである。光源から発光された光束が第一格子により、偏光状態を互いの間で直角に方向付けできる少なくとも二つの分光光束に分割される。その分光光束が、再び一緒にされて一つの合成光束になり、その合成光束から検知ユニットにおいて、移動に関係する複数の走査検知信号を生成することができる。分光光束の光路に偏光手段が配設されており、それに入射する分光光束に対するその偏光作用を、基準尺の運動自由度に沿って偏光周期を使って周期的に変更でき、そのとき偏光手段の偏光周期が第一格子の目盛周期より大きい。
(もっと読む)
アブソリュートロータリーエンコーダ
【課題】精度の点で有利なアブソリュートロータリーエンコーダを提供する。
【解決手段】第1軸の周りに一定の周期で複数のマークが配列され第2軸を回転中心として回転するスケールと、前記周期よりも小さいピッチで配置された複数の光電変換素子によって複数のマークの中の一部のマークを検出する第1検出器及び第2検出器のそれぞれから出力される周期信号に基づいて第1検出器の位置におけるスケールの絶対回転角度を算出する算出部と、を備える。前記算出部は、第1検出器から出力された周期信号の振幅を量子化することによってデータ列を生成し、該データ列を第1角度データに変換し、第1検出器及び第2検出器から出力された周期信号の振幅をそれぞれ規格化し、該振幅が規格化された周期信号を平均化し、該平均化された周期信号の位相から第1角度データよりも最小単位が小さい第2角度データを算出し、第1角度データと第2角度データとを合成する。
(もっと読む)
アブソリュートロータリーエンコーダ
【課題】マークが円筒面に形成されたアブソリュートロータリーエンコーダで計測精度の点で有利なものを提供する。
【解決手段】円筒面に複数のマークが一定の周期で周方向に沿って配列された回転する円筒体、前記円筒面に光を射出する光源、前記周期よりも小さいピッチで配置された複数の光電変換素子によって前記複数のマークの中の所定の数のマークを検出する検出器、前記検出器の出力に基づいて前記検出器の位置における前記円筒体の絶対回転角度を算出する算出部、前記検出器は前記光源と前記円筒面と前記検出器との幾何学的配置に起因して前記円筒面における前記所定の数のマークの領域が前記検出器に歪んで投影されることによって周期が不均一にされた前記所定の数のマークの信号を出力する。前記算出部は補正データを用いて前記所定の数のマークの信号を補正し前記補正された前記所定の数のマークの信号を用いて前記円筒体の絶対回転角度を算出する。
(もっと読む)
反射型エンコーダ、サーボモータ及びサーボユニット
【課題】受光面積を増大することで反射光を有効活用できるようにする。
【解決手段】インクレ用受光素子群140L,140Rを、光源130を間に挟んで回転ディスク110の円周方向に分割して配置し、第1及び第2アブソ用受光素子群150D,150Uを、光源130に対し回転ディスク110の半径方向における外側及び内側の両方に配置する。これにより、第1及び第2アブソ用受光素子151,152については連続して配置しつつ、光源130の周囲を4方向から囲むようにインクレ用受光素子群140L,140Rとアブソ用受光素子群150D,150Uを配置することができる。
(もっと読む)
光学式エンコーダ
【課題】 走査方向の依存性が小さくA相もしくはB相信号に同期した原点検出を安定して行うことができ、変位検出に用いられるエンコーダを提供する。
【解決手段】 発光部21、31から出射された光をスケール4に投影し、その反射光の回折パターンを検出する検出部22、32と、当該検出部の信号をエンコーダ信号として処理する信号処理回路とを備え、エンコーダ信号は、移動方向を示すために互いに90度位相のずれた位置信号であるA相信号及びB相信号と電源をオフ後、再度電源をオンした時などに原点位置を検出するZ相信号からなる。スケール4の内、Z相信号を形成するZ相スケール41には光反射領域及び光透過領域の2領域からなるベタパターンを用い、Z相信号はZ相スケール41から形成されたZ相出力信号をデジタル化して得られるパルス状信号であり、スケール4との間の相対移動量から対象物の変位を検出する。
(もっと読む)
反射型エンコーダ、サーボモータ及びサーボユニット
【課題】受光面積を増大することで反射光を有効活用できるようにする。
【解決手段】インクレ用受光素子群140L,140Rを、光源130を間に挟んで回転ディスク110の円周方向に分割して配置し、第1及び第2アブソ用受光素子群150D,150Uを、光源130に対し回転ディスク110の半径方向における外側及び内側の両方に配置する。これにより、第1及び第2アブソ用受光素子151,152については連続して配置しつつ、光源130の周囲を4方向から囲むようにインクレ用受光素子群140L,140Rとアブソ用受光素子群150D,150Uを配置することができる。
(もっと読む)
光学式位置測定装置
【課題】交差する二つの基準尺を備えた光学式位置測定装置を、二つの基準尺間の走査検知間隔を追加して測定できるようにする。
【解決手段】走査検知尺が二つの方向X,Yの第一または第二方向で、基準尺が両方向のそれぞれ別の方向で延伸しており、基準尺が第一および第二方向に対して直角な第三方向Zで、走査検知尺に対し走査検知間隔dだけオフセットして配設され、さらに光源LQを備え、その光が走査検知尺Aと基準尺Mの交点で走査検知尺Aを通過し基準尺Mに当たって、走査検知尺Aに向かって戻りディテクタに到達し、光が走査検知尺Aと基準尺Mの光学的機能構造において回折により異なった分光に分割されて再び一緒にされ、第一方向Xで走査検知尺Aと基準尺M間が移動する時に、分光の干渉によりディテクタで周期的な信号を発生する。そこで、走査検知尺Aと基準尺M間の走査検知間隔dが変化する時に同じく、ディテクタで周期的な信号が発生する。
(もっと読む)
反射型エンコーダ、サーボモータ及びサーボユニット
【課題】受光素子ごとの受光光量を均一することで検出精度を向上できるようにする。
【解決手段】反射型エンコーダ100は、回転軸AX周りに回転可能に配置され、インクリメンタルパターンIP、及び、第1及び第2シリアルアブソリュートパターンAP1、AP2が円周方向に沿って形成された回転ディスク110と、光源130、複数のインクレ用受光素子141を含むインクレ用受光素子群140L,140R、及び、複数の第1及び第2アブソ用受光素子151,152を含む第1及び第2アブソ用受光素子群150D,150Uを備え、回転ディスク110と対向して配置された基板120とを有し、第1及び第2アブソ用受光素子群150D,150Uは、基板120において、光源130を中心とする同心円状の光量分布の等高線CLに沿って各アブソ用受光素子151,152が配置されている。
(もっと読む)
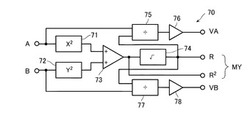
ブラッグ波長推定方法及びその装置
【課題】ブラッグ波長の推定誤差を低減し、且つR値−波長特性を容易に校正することを目的とする。
【解決手段】FBGセンサ部1を含む光ファイバ2と、広帯域光源3と、光サーキュレータ4と、光学フィルタ5と、第一の光電変換器6と、第二の光電変換器7と、第一の出力電圧(VT)及び第二の出力電圧(VR)により無次元量のR値を算出する処理部9と、予め取得したR値と−ブラッグ波長特性を用いてFBGセンサのブラッグ波長を推定する波長推定部10とを備え、
処理部は、光学フィルタ5の波長における透過率(PTx)と、第一の光電変換器6の波長において正規化された第一の光電変換特性(LET)との積、及び光学フィルタ5の波長における反射率(PRx)と、第二の光電変換器7の波長において正規化された第二の光電変換特性(LER)との積を用いてR値−ブラッグ波長特性を求めるように構成される。
(もっと読む)
光学式角度測定装置
【課題】少なくとも一つの走査検知格子および少なくとも一つの測定目盛を有する目盛板の間の相対移動を検出するための光学式角度測定装置を提供する。
【解決手段】その走査検知格子は直線走査検知格子として構成されており、目盛板には測定目盛として、第一および第二組合せラジアル円環格子を含み、そしてミラーを有している。それにより入射する光束が走査検知格子で、まず二つの分光光束に分割される。その分光光束が、第一組合せラジアル円環格子の方向に進み、そこで回折される。その回折された分光光束が、ミラーの方向に進み、そこで第二組合せラジアル円環格子の方向に反射される。その分光光束が、引き続いて第二組合せラジアル円環格子の方向に進み、そこで回折される。その回折された分光光束が走査検知格子の方向に進み、そこで分光光束の重ね合わせが生じる。
(もっと読む)
光電式エンコーダ
【課題】検出部取付・調整の際の作業性を向上させる。
【解決手段】測定軸方向に所定ピッチで回折格子が形成されたスケールと、このスケールに対して相対移動可能に配置され、スケールに光を照射する照射部、並びにスケールの回折格子で反射または透過された光を受光する受光部を備えた検出ヘッドと、この検出ヘッドの受光部からの受光信号を処理する信号処理装置と、検出ヘッドと信号処理装置との間で信号の伝送を行う信号伝送手段とを備え、信号処理装置又は信号処理装置に接続された情報処理装置にスケールに対する検出ヘッドの取り付け姿勢を示す情報を表示する表示手段を設ける。
(もっと読む)
アブソリュートエンコーダ
【課題】トラック数を増やさなくても高分解能であり、かつセンサの個体差による影響を低減できるアブソリュートエンコーダを提供する。
【解決手段】アブソリュートエンコーダは、信号パターンを読み取り可能な複数のセンサを含み、複数のセンサの位置が異なるように配列されたセンサ集合体と、信号パターンを含む基体と、を含むエンコーダユニットと、センサ集合体の出力から、センサ集合体と基体との絶対位置を算出する演算装置と、を有し、センサ集合体と基体とが相対的に移動すると、複数のセンサの検知範囲を信号パターンが移動する。複数のセンサの検知範囲を信号パターンが移動することで、トラック数を多くする必要がなく、アブソリュートエンコーダの分解能を高めることができる。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
原点位置検出回路
【課題】検出部から出力される原点パターンの関与を受けた出力電圧信号のDC成分の変動があっても、確実に原点信号の検出位置の再現性の向上が可能となる。
【解決手段】原点を示す原点パターン112が設けられたスケール110と、スケール110に対して相対変位可能である検出ヘッド120と、を備えるエンコーダ100で、検出ヘッド120の受光部126から出力される原点パターン112の関与を受けた出力電圧信号φZから原点の位置を示す原点信号PZを生成するためのコンパレータ132を有する原点位置検出回路であって、出力電圧信号φZを平滑化するDC電圧検出回路128と、出力電圧信号φZとDC電圧検出回路128から出力されるDC電圧信号Zdcとの差動増幅を行う差動増幅回路130と、を備え、差動増幅回路130の差動増幅信号Zoutがコンパレータ132に入力される。
(もっと読む)
61 - 80 / 498
[ Back to top ]