
Fターム[2F105AA02]の内容
Fターム[2F105AA02]に分類される特許
41 - 60 / 852
物理量検出素子、物理量検出装置および電子機器
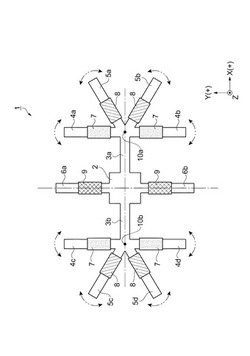
【課題】X軸、Y軸およびZ軸の各軸まわりの回転検出ができ、1つの発振回路で振動を励起することが可能な物理量検出素子を提供する。
【解決手段】物理量検出素子1は、基部2と、基部2からX軸に沿って互いに反対方向へそれぞれ延出した第1連結部3aおよび第2連結部3bと、第1連結部3aまたは第2連結部3bからY軸に沿って互いに反対方向へそれぞれ延出した一対の第1駆動振動腕4aおよび第2駆動振動腕4b、並びに一対の第3駆動振動腕4cおよび第4駆動振動腕4dと、第1連結部3aから斜めに延出した第1駆動検出振動腕5aおよび第2駆動検出振動腕5bと、第2連結部3bから斜めに延出した第3駆動検出振動腕5cおよび第4駆動検出振動腕5dと、基部2からY軸に沿って互いに反対方向へそれぞれ延出した第1検出振動腕6aおよび第2検出振動腕6bと、を備えている、ことを特徴とする。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法

【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
振動ジャイロセンサ
【課題】電源電圧に同じ周波数成分のノイズが存在しても、直流に重畳されずに精度の高い振動ジャイロセンサを提供することにある。
【解決手段】振動ジャイロセンサ2は、振動片10と、駆動電極36A,36Bと、検出電極38A,38Bと、モニタ回路12と、駆動回路14と、振幅調整回路16と、増幅回路18A,18Bと、差動増幅回路20と、同期検波回路22と、フィルタ信号V12を出力するフィルタ回路28と、フィルタ信号V12に対して、電源電圧Vddの変動に対して比例に変動し感度信号V13を出力するレシオメトリック回路30と、を含む。
(もっと読む)
物理量検出素子、物理量検出装置、および電子機器
【課題】振動漏れを十分に抑制することが可能な物理量検出素子を提供する。
【解決手段】ジャイロ素子(物理量検出素子)1は、基部2と、X軸に沿って、基部2から互いに反対方向へ延出した一対の第1突出部3(3a,3b)と、第1突出部3aから、斜めに延出した第1駆動腕11aおよび同じく第1突出部3aから斜めに延出し、第1駆動腕11aと逆相で振動する第2駆動腕11bと、第1突出部3bから、斜めに延出した第3駆動腕12aおよび同じく第1突出部3bから斜めに延出し、第3駆動腕12aと逆相で振動する第4駆動腕12bと、基部2からY(+)軸方向へ延出した第1検出腕13aおよびY(−)軸方向へ延出した第2検出腕13bと、基部2からY(+)軸方向へ延出した第3検出腕14aおよびY(−)軸方向へ延出した第4検出腕14bと、を備えている、ことを特徴とする。
(もっと読む)
振動ジャイロ素子、ジャイロセンサー及び電子機器
【課題】振動ジャイロ素子の検出感度を向上させる。
【解決手段】振動ジャイロ素子1は、支持部2から延出する1対の駆動用振動腕3a,3bとそれとは反対側の1対の検出用振動腕4a,4bとを備え、駆動用振動腕が面内方向に逆向きに屈曲振動する駆動モードと、駆動用振動腕が面外方向に互いに逆向きにかつコリオリ力の作用方向と逆相で屈曲振動し、検出用振動腕が面外方向に互いに逆向きにかつ駆動用振動腕と逆相で屈曲振動する第1の検出モードと、駆動用振動腕が面外方向に互いに逆向きにかつコリオリ力の作用方向と同相で屈曲振動し、検出用振動腕が面外方向に互いに逆向きにかつ駆動用振動腕と同相で屈曲振動する第2の検出モードとを有し、各検出用振動腕が、第1の検出モードと第2の検出モードとにおいて同相で屈曲振動する。
(もっと読む)
振動ジャイロ素子、ジャイロセンサー及び電子機器
【課題】両側音叉型の振動ジャイロ素子において、駆動用検出腕の機械的振動漏れによる影響を解消又は軽減して検出精度及び感度を向上させる。
【解決手段】振動ジャイロ素子11は支持部12から互いに逆向きに延出する各1対の駆動用振動腕13a,13bと検出用振動腕14a,14bとを備え、駆動用振動腕は駆動モードでXY面内方向に共振周波数fdで屈曲振動し、検出モードではY軸周りの回転によるコリオリ力によってZ軸方向に逆相で屈曲振動し、検出用振動腕がZ軸方向に駆動用振動腕とは逆相で屈曲振動する。検出用振動腕はXY面内方向に共振周波数fh<fdで屈曲振動するように設定され、共振周波数fhは駆動モードにおいて各検出用振動腕から出力される検出信号の値S1,S2との差|S1−S2|を小さくするように設定される。
(もっと読む)
電子デバイスおよび電子機器
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができる電子デバイスおよび電子機器を提供すること。
【解決手段】電子デバイス1は、実装基板2と、台座3と、蓋部材8とを有している。また、台座3は、実装基板2に含まれる第1のリジッド基板21を支持する第1の支持部32と、実装基板2に含まれる第2のリジッド基板22をその厚さ方向が第1のリジッド基板21の厚さ方向に対して直交するように支持する第2の支持部33とを有している。また、蓋部材8は、その内側に実装基板2に含まれる第3のリジッド基板23を支持する第3の支持部82を有している。
(もっと読む)
直接転写による埋込み電極を有する構造体の製造方法およびこのようにして得られる構造体
【課題】マイクロシステムおよび/またはナノシステムタイプの新規作製方法、ならびに新規構造体を提供すること。
【解決手段】下部電極と呼ばれる少なくとも1つの電極(102)、および少なくとも1つの誘電体層(103)を含む第1の基板(100)と、
可動部分(210)を含めた、デバイスのメイン平面と呼ばれる平面全体に延在する中間基板(200’)と、
中間基板(200’)に付着された上部基板(300)であって、前記可動部分が下部電極と上部基板との間を移動することができる、上部基板と
を含む、マイクロシステムおよび/またはナノシステムタイプのデバイスについて記載されている。
(もっと読む)
スイッチトキャパシター積分回路、フィルター回路、物理量測定装置、及び電子機器
【課題】面積が小さく、消費電流を大幅に低減することができるスイッチトキャパシター積分回路、フィルター回路、物理量測定装置、及び電子機器等を提供する。
【解決手段】スイッチトキャパシター積分回路としての2重正相積分回路10は、第1の容量CAを有し、第1の期間において入力信号に対応した電荷を第1の容量CAに充電する第1の電圧電荷変換回路20と、第2の容量CBを有し、第2の期間において第1の容量CAに充電された電荷の一部を第2の容量CBに充電し、第2の容量CBに充電された電荷の一部を転送する第1の電荷積分回路30とを含む。
(もっと読む)
角速度検出回路、集積回路装置及び角速度検出装置
【課題】有効な検出範囲をできるだけ確保しながら出力電圧範囲を所望の範囲に制限することが可能な角速度検出回路、集積回路装置及び角速度検出装置を提供すること。
【解決手段】角速度検出回路(検出回路30)は、角速度検出素子4の出力信号に含まれる角速度成分を検波する検波部(同期検波回路340)と、検波部(同期検波回路340)の出力信号に基づいて角速度信号を生成する角速度信号生成部と、を含む。角速度信号生成部は、角速度検出素子4の検出感度に応じて角速度信号の電圧範囲を調整する感度調整部(可変ゲインアンプ360)と、感度調整部(可変ゲインアンプ360)の後段に設けられ、角速度信号の電圧を所望の範囲に制限する電圧制限部(電圧制限回路370)と、を含む。
(もっと読む)
センサーデバイスおよび電子機器
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができるセンサーデバイスおよび電子機器を提供すること。
【解決手段】センサーデバイス1は、内側に固定面101、102を有する固定部材3と、固定部材3の固定面101、102に直接または間接的に固定された少なくとも1つの電子部品7とを有し、固定部材3が、電子部品7を収容するケーシング10の一部を構成する。また、固定面101、102は、互いに直交している。
(もっと読む)
センサーデバイスおよび電子機器
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができるセンサーデバイスおよび電子機器を提供すること。
【解決手段】センサーデバイス1は、角速度センサー711が実装された第1のリジッド基板21と、角速度センサー712が実装された第3のリジッド基板23とを有する実装基板2と、実装基板2を固定する台座3とを有している。また、台座3は、x軸およびy軸に沿う第1固定面を有する基部31と、基部31上に設けられ、且つ、x軸およびy軸に沿う第2固定面およびy軸およびz軸に沿う第3固定面の少なくとも一方を有した突出部41〜44と、を含み、リジッド基板21、22、23の各々は、第1固定面、第2固定面または第3固定面に支持され、角速度センサー711、712は、検出軸が互いに交わっている。
(もっと読む)
共振器ファイバ光ジャイロスコープ強度変調コントロールのためのシステムと方法
【課題】高速、低損失で安価な共振器ファイバ光ジャイロスコープ強度変調コントロールのためのシステムを提供する。
【解決手段】共振器ファイバ光ジャイロ(RFOG)における強度変調を制御するための方法であって、共振検出変調周波数で生成される正弦波リファレンスを用いて光線のデジタル・サンプルを復調することによって、強度変調エラー信号を生成するステップと、前記強度変調エラー信号から正弦波フィードバック制御信号を生成するステップと、前記正弦波フィードバック制御信号で強度モジュレータを駆動するステップであって、前記強度モジュレータは前記光線から残余の強度変調をキャンセルする、ステップと、を含む。
(もっと読む)
回路基板、センサーモジュールおよび電子機器
【課題】小型化を図りつつ、優れた信頼性を発揮するこのとのできる回路基板、センサーモジュールおよび電子機器を提供すること。
【解決手段】センサーモジュール1は、下面42に形成されたアナログ回路部421および上面41に形成されたデジタル回路部411を有する実装基板4と、実装基板4の下面42側に設けられた2つの角速度センサー712、713が実装基板4に対して縦置きに設けられている回路基板2と、実装基板4の下面42と対向するように配置され、回路基板2を支持する台座3とを有する。
(もっと読む)
振動片、振動子、発振器、及びセンサー
【課題】小型化を進める上で、周囲温度の変化に対する特性が良好な圧電振動片と、圧電デバイスを提供すること。
【解決手段】圧電材料により形成された所定長さの基部51と、前記基部の一端側から延びる複数の振動腕35,36と、前記基部の一端側より所定距離だけ離れた他端側に接続される連結部73と、前記連結部に接続され、圧電振動片の幅方向に延長される接続部74と、前記接続部に接続され、かつ前記振動腕の外側において、該振動腕と同じ方向に延びる支持用アーム61,62とを備え、振動腕35、36が接続されている基部51の一端から、圧電振動片の振動腕35、36の反対側の一端までの長さ寸法hと、前記連結部を介して前記支持用アームが前記基部に接続されている接続部の幅寸法L3との比率であるL3/hが、40%以下とされている、圧電振動片である。
(もっと読む)
電子デバイスおよび電子機器
【課題】小型化を図ることができる電子デバイスを提供すること、また、かかる電子デバイスを備える信頼性の高い電子機器を提供すること。
【解決手段】本発明のセンサーデバイス1(電子デバイス)は、ICチップ20およびセンサー素子30と、ICチップ20を支持する支持部材10と、支持部材10が設置される設置面を有し、ICチップ20、センサー素子30および支持部材10を収納するパッケージ3とを有し、支持部材10は、設置面に固定される底部10aと、底部10aの外周部から設置面とは反対側に延出する壁部10b、10cとを備え、ICチップ20は、壁部10b、10cの底部10a側の壁面に取り付けられている。
(もっと読む)
物理量センサー、電子機器、および物理量センサーの製造方法
【課題】センサー部やベース基板の損傷を抑制しつつ、製造時などにおけるベース基板とセンサー部との貼り付きを回避可能な物理量センサー、および物理量センサーの製造方法の提供。
【解決手段】物理量センサー1は、肉薄部6aおよび肉厚部6bが設けられたベース基板6と、ベース基板6の肉薄部6aの上方に揺動可能に配置されたセンサー部4と、を有し、ベース基板6には、平面視でセンサー部4の端部と重複する肉薄部6aの少なくとも一部に導電膜9,10が設けられ、導電膜9,10が、肉厚部6bの表面の少なくとも一部まで延びていることを特徴とする。
(もっと読む)
角速度検出装置
【課題】振動や電磁ノイズの影響が大きい環境に角速度検出センサを設置した場合でも高精度な角速度検出を実現すること。
【解決手段】互いに直交する第1の方向および第2の方向に変位可能な振動体を有し、前記振動体を第1の方向に振動させた状態で前記振動体の第2の方向への変位を角速度として検出する角速度検出装置において、前記振動体を第1の方向に振動させる駆動信号の周波数変化に応じて、第2の方向の変位量から角速度を検出するためのサーボ信号の周波数を変化させる。
(もっと読む)
屈曲振動片、その製造方法、及び電子機器
【課題】屈曲振動片の振動腕の側面に厚さ方向に分離した電極を高精度にパターニングする。
【解決手段】屈曲振動片21は、基部22から延出する断面矩形の振動腕24が下面24b及び上面24aと左側面24c及び右側面24dとの間に、それぞれ左側面及び右側面に交わる段差面27a,28aと上面及び下面に交わる段差側面27b,28bとからなる第1、第2段差部27,28を有し、左右側面の第1、第4検出電極29a,29dと段差側面の第2、第3検出電極29b,29cとが、電極膜を形成していない段差面27a,28aの部分によりそれぞれ振動腕の厚さ方向に分離されている。第1〜第4検出電極は、従来のフォトエッチングにより、一般的な露光機を用いた上下面からの露光によって高精度にパターニングされる。
(もっと読む)
角速度センサ、半導体装置及び携帯機器
【課題】小型かつ簡易な構成の角速度センサ、半導体装置及び携帯機器を提供すること。
【解決手段】本発明の一態様である角速度センサ100は、リングオシレータ11及び検出回路13を有する。リングオシレータ11及び検出回路13は、半導体基板上に形成される。リングオシレータ11は、インバータIVV1〜INV3からなる遅延パスを有する。検出回路13は、リングオシレータ11の発振周波数の変動量から、回転の角速度を検出する。
(もっと読む)
41 - 60 / 852
[ Back to top ]