
Fターム[2F129BB15]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 標識・目印 (372)
Fターム[2F129BB15]の下位に属するFターム
灯台 (1)
Fターム[2F129BB15]に分類される特許
21 - 40 / 371
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
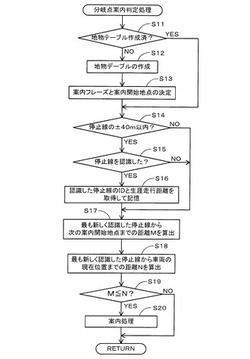
【課題】ユーザに案内分岐点を正確に特定させることを可能にした移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラムを提供する。
【解決手段】手前分岐点に設置された退出側信号機に対する相対位置によって特定される案内開始地点と、その案内開始地点で開始する案内分岐点の案内フレーズをそれぞれ決定するとともに(S13)、停止線を認識対象とした高精度ロケーションシステムを用いて、最も新しく認識した停止線から車両の現在位置までの距離を算出し(S18)、算出した距離を用いて車両が案内開始地点を通過したか否か判定し(S19)、車両が案内開始地点を通過したと判定された時に、案内分岐点の案内を開始する(S20)ように構成する。
(もっと読む)
情報システム

【課題】利用者に携帯される端末と情報センターで構成される情報システムで、携帯端末にロケ−ターを備えていないか、あるいはロケ−ターの制度が劣るときでも、有効な新規の利用を供する。
【解決手段】対象地域に標識を設置し、利用者が存在するエリアにおいて設置されている標識が備える情報が入力されたときに、標識の位置データを端末に表示し、組み合わせを形成する参加者の位置状況を把握できるようにし、同一の標識が参加者に使用されたときにゲームのステージの完了とする。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】電気自動車のバッテリ残量を考慮して、電気自動車を利用したユーザが希望時刻に指定場所に到着できるかを判断し、到着できない場合、公共交通機関による経路を含む代替経路を案内することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、電気自動車を利用する案内経路である電気自動車経路を探索し、電気自動車のバッテリの残存容量および電気自動車経路情報に基づき、電気自動車が到着希望時刻までに目的地に到着できるか否か判定し、電気自動車が到着希望時刻までに目的地に到着できないと判定された場合、電気自動車経路以外の案内経路である代替経路を探索し、電気自動車経路情報または代替経路情報を含む経路案内情報を出力部を介して出力させる。
(もっと読む)
方位表示装置、方位表示方法およびプログラム
【課題】周囲の環境の影響を受けることなく、方位を正しくユーザに示す。
【解決手段】方位表示装置であって、表示部と、被写体を撮影する撮影部と、当該方位表示装置が存在する位置を測定する位置測定部と、位置測定部にて測定された位置を中心とした周囲の地形を示す全方位地形データによる地形と、撮影部にて撮影された撮影画像中の地形とに基づき、撮影の方向の方位を特定する方位特定部と、方位特定部にて特定された方位を認識させることが可能な画像を、当該撮影画像に重畳させて表示部に表示させる制御部とを有する。
(もっと読む)
案内情報送信装置
【課題】地図表示技術における案内情報提供に際し、利用者の利便性の向上を目的とする
【解決手段】案内サーバは、移動端末に送信する地図画像を表すデータ(地図画像データ)、および、地図画像において予め規定された地域に関する地域情報および各地域内に存在する店舗や観光地などの地物データを有しており、移動端末の位置情報に応じて移動端末の現在地の地図データを送信したり、移動端末の現在地が含まれる地域内に存在する店舗や観光地の情報を、移動端末からの要求の有無にかかわらず、移動端末に対して送信したりする。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
経路探索装置、経路探索システム、サーバ装置、端末装置、経路探索方法、および、プログラム
【課題】適切な経由地を効率よく探索することができる、経路探索装置、経路探索システム、サーバ装置、端末装置、経路探索方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、交通網を規定するネットワークデータを記憶し、ネットワークデータに基づいて、出発地および目的地を少なくとも含む経路探索条件の出発地から複数の経由地候補までの探索経路、および、当該経路探索条件の目的地から当該複数の経由地候補までの探索経路を、それぞれ1回ずつ拡散させて経路を探索し、探索した、出発地から経由地候補を介した目的地までの経路を含む探索結果情報を生成する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】案内経路上の案内箇所において正しく通過したか否かを判断し、正しく通過したことをユーザに知らせることができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、出発地から目的地までの案内経路を探索し、現在位置が案内箇所手前の所定範囲に存在するか否か判定し、現在位置が所定範囲に存在すると判定された場合、方面案内情報を表示部に表示させ、現在位置が案内箇所を通過後、案内箇所から目的地への案内経路上に存在するか否か判定し、現在位置が案内箇所を通過後、案内箇所から目的地への案内経路上に存在すると判定された場合と、案内箇所から目的地への案内経路上に存在しないと判定された場合と、で異なる出力態様で方面案内情報を表示部に表示させる。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
自位置特定システム、自位置特定プログラム及び自位置特定方法
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
【課題】案内交差点をユーザに正確に特定させることを可能とした走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両51の進行方向前方に案内交差点52が有る場合に、案内交差点52の周辺に位置する目印対象物候補53、55の内、該案内交差点の案内を行う場合に目印とする目印対象物の候補である目印対象物候補の情報を取得するとともに、目印対象物候補を視認するのに障害となる可能性のある障害物58の情報を取得し、目印対象物候補が複数ある場合には、目印対象物候補の情報と、障害物の情報と、案内交差点の案内を開始する案内開始地点と、案内交差点の案内を終了する案内終了地点とに基づいて、複数の目印対象物候補の内から案内交差点の目印対象物とする対象物を選択し、案内交差点の目印対象物に選択された目印対象物候補を用いて、案内交差点の案内を行うように構成する。
(もっと読む)
地物情報学習システム、地物情報学習プログラム及び地物情報学習方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、画像認識を行うために、画像認識する際の日射の影響を示す情報を含む地物情報を整備する。
【解決手段】地物のそれぞれについて、地物と日陰との関係を示す情報である地物日陰情報を演算し、日陰と日向とのコントラストを示すコントラスト情報を取得し、地物日陰情報とコントラスト情報とを含む日照要因情報と、撮影画像に含まれる地物の画像認識を行なう画像認識部による画像認識結果とを関連付けて学習データベースに記憶し、学習データベースに記憶された情報に基づいて、地物のそれぞれについての、日照による画像認識への影響の度合いを示す日照特性情報を生成し、地物のそれぞれについての地物情報を構成する情報として格納する。
(もっと読む)
地物選定システム、地物選定プログラム及び地物選定方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、予め存在が把握されている複数の地物の中から画像認識の対象とする対象地物を選定する。
【解決手段】所定範囲内に存在する複数の候補地物についての地物情報である候補地物情報を取得し、日陰と日向とのコントラストを示すコントラスト情報を取得し、候補地物情報と日時情報とに基づいて、候補地物のそれぞれについて、候補地物と日陰との関係を示す情報である地物日陰情報を演算し、地物日陰情報とコントラスト情報とを含む日照要因情報に基づいて、候補地物の中から対象地物を選定する。
(もっと読む)
地図表示装置、地図表示方法及びプログラム
【課題】 地図画像の取得後に速やかに現在地の表示を開始する。
【解決手段】 地図画像を取り込む画像取り込み手段(14)、地図画像を表示する画像表示手段(4)、地理的な座標である地理座標と地図画像上の座標である地図座標とを関連付ける座標対応情報を複数の異なる地理座標の各々に対応させて記憶する座標対応情報記憶手段(25)、現在位置に対応する地理座標を取得する位置取得手段(17)、地理座標に対応する地図画像上の地図座標を特定し地理座標と地図座標とを関連付ける座標対応情報を座標対応情報記憶手段に追加して記憶する関連付け手段(25)、地理座標に基づいて現在位置を地図画像の上に表示する際にその時点において座標対応情報記憶手段に記憶されている複数の座標対応情報を用いて地図画像の部分的な歪を補正した上で取得した地理座標に対応する地図座標を特定して表示する位置表示手段(19)を備える。
(もっと読む)
目的地案内システム、及び目的地案内装置
【課題】本願発明の課題は、従来技術が抱える問題を解決することであり、ノードとリンク及びこれらのジオメトリを整備・更新することなく、しかも目印を手掛かりにした直感的でわかりやすい目的地案内システム、及び目的地案内装置を提供することである。
【解決手段】本願発明の目的地案内システムは、複数の目印情報を記憶する目印記憶手段と、自位置を入力する自位置入力手段と、目的地を指定する目的地指定手段と、進むべき目印を抽出する目印抽出手段と、目印を表示する表示手段と、を備え、目印は、目視可能なものであって、当該目印付近から1又は2以上の他の目印を視通可能な位置に設けられたものであり、目印抽出手段が、自位置と目的地と目印情報とに基づいて進むべき目印を抽出し、表示手段が、目的地までの進むべき目印を順次示して目的地まで案内し得るシステムである。
(もっと読む)
経路案内装置、方法及びコンピュータプログラム
【課題】鉄道などの予め定められた路線を利用した経路において、現在位置を容易に把握する。
【解決手段】 経路案内を行う可搬型の経路案内装置1は、複数のアクセスポイントのいずれかである、乗車駅、停車駅及び下車駅の緯度経度1015と、経路で利用する路線の路線ID1051と、経路案内装置1の現在位置を検出するGPS処理部111と、乗車駅、停車駅及び下車駅の緯度経度1015と、GPS処理部111が検出した経路案内装置1の現在位置の位置情報とに基づいて、乗車駅、停車駅及び下車駅のうち現在位置から最も近い2駅を抽出する車両位置判定部121と、車両位置判定部121により抽出された2駅に対応する表示と、その2駅に対応する表示の間に経路案内装置1の現在位置を示す現在位置表示とを含む、現在位置表示画面を表示する手段と、を備える。
(もっと読む)
推定位置評価システム及びプログラム
【課題】推定位置評価システム及びプログラムにおいて、推定環境地図上の任意の地点で推定した自己位置が、実環境地図上の実際の位置からどの程度ずれているかを比較的簡単に、且つ、精度良く評価することを目的とする。
【解決手段】ロボットが移動経路を挟む特徴点ペアの間を通過する時の自己位置推定結果を求め、特徴点ペアの推定環境地図上の座標値と、ロボットが特徴点ペアの間を通過する時のロボットの座標値を基準とした位置情報とに基づいて、推定環境地図上のロボット位置を計算し、推定環境地図上のロボット位置と自己位置推定結果を比較することでロボットの自己位置推定を評価するように構成する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】乗車する交通機関の運行情報を利用者にわかりやすく提供することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、現在位置情報を取得し、取得された現在位置情報に基づく現在位置、または、入力部を介して指定された指定地点を基準地点として設定し、ネットワーク情報に基づいて、設定された基準地点から所定の範囲にある基準領域において運行している交通機関の路線を特定し、特定された路線上を運行する交通機関の現在位置情報を取得し、取得された交通機関の現在位置情報に基づき、特定された路線の運行経路の少なくとも一部を含む領域である対象領域における当該交通機関の運行状況に関する運行状況情報を生成し、生成された運行状況情報を出力部を介して出力させる。
(もっと読む)
21 - 40 / 371
[ Back to top ]