
Fターム[2F129BB20]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 速度センサ (4,676)
Fターム[2F129BB20]に分類される特許
1,801 - 1,820 / 4,676
駐車場検出装置、駐車場検出方法及びコンピュータプログラム
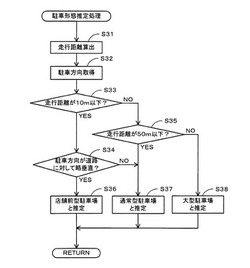
【課題】駐車車両が逸脱前に走行していた道路に対する駐車位置の駐車形態を正確に推定することを可能とした駐車場検出装置、駐車場検出方法及びコンピュータプログラムを提供する。
【解決手段】自車が道路を逸脱して駐車場への駐車を行った場合に、道路の逸脱地点から駐車位置までの自車の走行履歴に基づいて、自車が道路を逸脱してから駐車するまでの走行距離と駐車方位をそれぞれ検出し(S31、S32)、検出した走行距離と自車の駐車方向とに基づいて、自車が逸脱前に走行していた道路に対する駐車を行った駐車場の駐車形態を推定する(S33〜S36)ように構成する。
(もっと読む)
情報報知装置、その制御方法及びその制御プログラム

【課題】交差点において、信号機及び一時停止情報が存在しない場合であっても、ユーザに交差する道路から自車以外の車両の走行があり得る旨の注意を促すことが可能な情報報知装置を提供する。
【解決手段】交差点情報読出手段32は、自車位置検出手段31により検出された自車位置が存在する道路データ上における直近の交差点情報を読み出す。信号機判定手段33は、その交差点に対応する箇所に信号機が設けられているかを判定する。
信号機情報が存在しないと判定された場合に、一時停止情報判定手段34は、交差点情報読出手段32を通じて読み出された交差点において、一時停止情報が存在するかを判定する。一時停止情報が存在しないと判定された場合に、報知手段35は、この交差点に一時停止情報が存在しない旨の警告情報を表示案内部7や音声案内部9に出力する。
(もっと読む)
移動体用測位装置
【課題】本発明は、移動体のリアルタイムの位置を、高精度で測位する移動体用測位装置を提供することを目的とする。
【解決手段】現在時刻における移動体の位置を測位し、所定の出力周期で出力する移動体用測位装置100であって、
前記現在時刻が、GPS演算データ更新時には、GPS演算データ、慣性航法測位手段30、速度検出手段40及び誤差補正手段50を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、移動体モデル演算手段60が前記現在時刻までの移動体モデルを演算して前記移動体の位置を測位し、
前記現在時刻が、前記GPS演算データ更新時と異なったときには、前記慣性航法測位手段、前記速度検出手段及び前記誤差補正手段を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、前記移動体モデル演算手段が前記現在時刻までの移動体モデルを演算し、前記移動体を測位することを特徴とする。
(もっと読む)
速度計測装置
【課題】他の移動体へ容易に転用でき、計測した移動体の走行速度から走行ルートにおける移動体の運行状態を特定することができる速度計測装置を提供する。
【解決手段】台車1に、速度検出器3と非接触式速度計4とパーソナルコンピュータ5とバッテリ6で構成する一体型の速度計測装置2を着脱自在に取り付ける。速度検出器3と非接触式速度計4で計測した台車1の走行速度データをパーソナルコンピュータ5に転送する。パーソナルコンピュータ5は、速度データを記録すると共に、走行時間で積分し算出した走行距離データを記録する。また、パーソナルコンピュータ5には、台車1の走行経路図のデータを予め記録しておく。そして、これらのデータに基づいて、台車1の運行状態、例えば、台車1の走行速度が“0”となっている運行停滞場所を特定する。
(もっと読む)
ナビゲーション装置および車両の走行安全装置
【課題】道路の分岐点において適切なマップマッチングをおこない、適切に安全装置を作動させる。
【解決手段】ナビゲーション装置13は、現在位置検出部21から出力される位置信号に基づいて地図データ記憶部23の道路データのうち自車両が存在する走行路を判定するナビゲーション処理部22と、撮影装置16から出力される画像データに基づいて道路の走行区分線を認識する道路形状認識部65とを備え、ナビゲーション処理部22は、道路形状認識部65により認識された走行区分線に基づいて、自車両が分岐点を通過する前後において同一の道路を継続して走行しているか否かを判定し、同一の道路を継続して走行していると判定した場合に、自車両が存在する走行路を、この時点までに判定した走行路から分岐点に接続された他の走行路へと変更することを禁止する。
(もっと読む)
ナビゲーション装置、進行方向指示方法、及び制御プログラム
【課題】分岐路での進行方向を示す表示にユーザの視線を誘導可能にする。
【解決手段】メインディスプレイ24で地図50上に自車位置マーク51を表示して経路案内を行っているときに、進路前方の分岐路52での進行方向をサブディスプレイ25に表示して当該分岐路52での進行方向を指示する進行方向指示方法において、前記サブディスプレイ25に前記分岐路52での進行方向を表示する前に、前記メインディスプレイ24に前記進行方向を示す進行方向マーク60を表示した後、前記メインディスプレイ24から前記進行方向マーク60を消し、前記サブディスプレイ25に前記分岐路52での進行方向を表示するようにした。
(もっと読む)
ナビゲーション装置
【課題】視認できる施設を目印として高架道路を走行することができるナビゲーション装置を提供する。
【解決手段】車両が高速道路である高架道路31の下の一般道路32を走行しているとき、表示モニタに表示される地図30には、施設の建物を表す図形(以下、建物図と呼ぶ)34a〜34yと、施設を表すアイコン(以下、アイコンと呼ぶ)35a〜35eとが表示される。車両が高架道路31を走行しているとき、表示モニタに表示される地図には、最上部が車両の標高より高い施設の建物図34a〜34gが表示される。最上部が車両の標高より低い施設の建物図34h〜34yおよび車両の標高より低い位置にある施設のアイコン35a〜35eは表示されない。
(もっと読む)
情報表示機器、メニュー画面表示方法、及び制御プログラム
【課題】表示領域を割くことなく、メニュー画面の階層の深さを把握可能にする。
【解決手段】階層化された複数の選択項目42を選択するためのメニュー画面40を前記階層ごとに記憶する記憶部18と、前記メニュー画面40を前記階層ごとに切り替えて表示する表示部14とを有したカーナビゲーション装置1において、前記階層ごとのメニュー画面40の背景48に、それぞれ同一形状の背景図形50を、前記階層の深さに応じた大きさで表示するようにした。
(もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
路車間通信システム、車載機、センター、路車間通信方法及びプログラム
【課題】不要な送信を未然に回避して通信負荷を格段と軽減し得ると共に、所望する情報を的確に収集して正確な環境状態を把握することができる路車間通信システム、車載機、センター、路車間通信方法及びプログラムを提供すること。
【解決手段】車両2とセンター3とが互いに通信可能に接続され、センター3が車両2から送信される車両情報を受信して蓄積する路車間通信システム1であって、車両2の状態を検知する車両状態検知手段21dと、前記車両状態検知手段21dによって検知された検知結果が予め設定される所定条件を満たした場合、当該検知結果を前記車両情報として送信する送信部21fと、を備える前記車両2に搭載された車載機21と、前記車両情報を送信した車両2の周辺に存在する車両2に対し、当該車両情報を送信するように促す情報送信指令手段と、を有するようにした。
(もっと読む)
ナビゲーション装置
【課題】本発明は、特に通話を行う可能性の高い場合及び/又は運転者が通話中である場合に、安全な経路を提供することを可能とするナビゲーション装置を提供することを目的とする。
【解決手段】運転者が通話する通話確率を求める確率検出部(114)と、安全性の高い第1経路と、目的地までの距離や到達時間に応じた第2経路とを探索可能な経路探索部(113)と、通話確率が閾値より高い場合には経路探索部において第1経路を探索するように制御する制御部(111)を有することを特徴とするナビゲーション装置(100)。
(もっと読む)
ナビゲーション装置、ナビゲーション装置の表示制御方法及び制御プログラム
【課題】単一の操作子を用いて地図の拡大/縮小表示及びスライド表示の操作を容易かつ迅速にできるようにしたナビゲーション装置、ナビゲーション装置の表示制御方法及び制御プログラムを提供する。
【解決手段】プッシュ操作とスライド操作とが可能な操作ノブ16Aを備え、この操作ノブ16Aのプッシュ操作が継続した場合に、地図の拡大表示と縮小表示とを繰り返す縮尺選択用表示を行い、操作ノブ16Aがさらにスライド操作された場合に、スライド操作時点の縮尺の地図をスクロール表示させるようにした。
(もっと読む)
車両用ナビゲーションシステム及び車両用ナビゲーションシステムにおける位置情報の補正方法、並びに、情報配信サーバ及び車載ナビゲーション装置
【課題】車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる車両用ナビゲーションシステムを提供する。
【解決手段】車両用ナビゲーションシステムにおいて、情報配信センタ50は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に対して送信する。そして、他車両に搭載されている車載ナビゲーション装置10は、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
(もっと読む)
ナビゲーション装置、自装置位置表示方法、及び制御プログラム
【課題】地図上の自車位置マークを容易に見つけることができるようにする。
【解決手段】自車の位置を示す自車位置マーク42を、地図40上の前記自車の位置に対応する位置に表示して経路案内を行うカーナビゲーション装置1において、前記経路案内中に、前記自車位置マーク42の進行方向前方に、該進行方向を示す進行方向マーク54を動的に表示するマーク表示制御部32を備える構成とした。
(もっと読む)
バリア情報提供システム及び方法とこれに用いる低速車両
【課題】 走行中の低速車両からバリア情報を自動的に収集してそのバリア情報を地図情報に対応づけられるようにし、安価でかつ普及し易いバリア情報提供システムとする。
【解決手段】 本発明は、バリア情報を含むプローブ情報を生成する複数の低速車両(車いす)3と、この複数の低速車両3から収集したプローブ情報に基づいてバリア情報を地図情報と対応づけ、この地図情報と対応づけられたバリア情報を低速車両3に送信するサーバ装置2とを備えたバリア情報提供システム1である。上記低速車両3には、自車両の走行位置を検出する位置検出部16と、走行時に自車両に生じる振動又は傾斜度若しくはこれらの双方に基づいてバリア情報を自動的に生成するバリア情報生成部11,12,22と、走行位置とバリア情報とを含むプローブ情報をサーバ装置2に送信するためのデータ送信部である携帯電話機8が設けられている。
(もっと読む)
車両用走行車線検出装置
【課題】 複数車線道路を走行する車両の走行車線の検出精度を向上させること。
【解決手段】 GPS測位データの測位品質を取得する。地図データに基づいて、各車線毎に、車線中央の少なくとも2つのノードの位置と、少なくとも2つのノードを連結したリンクを表す車線中央リンクデータを生成する。取得した測位品質に応じて選択した測位手段によって測定された自車位置を、当該自車位置に最も近い車線中央線リンクにマッチングさせるとともに、当該マッチングに係る車線の幅を所定値拡大させ、自車位置が該拡大した幅の車線内にあるときは、当該マッチングに係る車線へのマッチングを維持する。
(もっと読む)
ナビゲーション装置、および画像表示プログラム
【課題】目的地までの案内経路を地図画像とともに表示部に表示させる機能を有するナビゲーション装置において、案内経路等に近い施設を探す際に手間がかかることを防止し、走行中であっても容易に案内経路等に近い施設を探すことができるようにする
【解決手段】ナビゲーション装置においては、地図スクロール処理にて、案内経路を表示させる機能の作動中において(S140:YES)、スクロール後の表示画像に案内経路が含まれているか否かを判定する(S150)。そして、表示画像に案内経路が含まれていないと判断した場合に(S150:NO)、表示画像に案内経路が含まれるように表示画像を表示させる(S160)。具体的には例えば、表示画像をスクロールさせることによって案内経路が表示画像に表示されるように表示させる。
(もっと読む)
地図情報処理装置
【課題】この発明は、地図データのバージョンの違い応じてナビゲーション機能を変更することができる地図情報処理装置を提供する。
【解決手段】所定範囲の地図を複数のメッシュに分割して得られた単位地図毎に作成された地図データであって、新バージョンの単位地図と旧バージョンの単位地図とが混在した地図データを記憶する地図データ記憶部102と、自車位置を算出する自車位置算出部106と、自車位置算出部で算出された自車位置に基づき旧バージョンの単位地図に存在しない道路を走行していることを判断した場合に、該算出された自車位置に基づき走行軌跡を作成する制御部100と、制御部で作成された走行軌跡に基づき道路データを作成して地図データ記憶部に追加する道路データ追加部109を備えている。
(もっと読む)
ナビゲーション装置、およびナビゲーション装置に用いる制御用プログラム
【課題】ナビゲーション装置において、メモリ資源を有効活用しつつ、ユーザの快適性の低下を抑える技術を提供する。
【解決手段】ナビゲーション装置のCPUは、外部記憶部16中の複数個のプログラム441〜45のうち、常駐グループに属するプログラム41〜43を、DRAM17bに常駐させ、常駐グループに属さないプログラム44、45を、DRAM17bに常駐させない。また、CPUは、操作部に対するユーザの選択操作に基づいて、当該複数個のプログラム41〜45を、常駐グループに属するプログラムと常駐グループに属するプログラムに振り分ける。
(もっと読む)
ナビゲーション装置、車両、及びナビゲーションプログラム
【課題】学習したキーワードを意味単位で区分する。
【解決手段】ナビゲーション装置は、ユーザが検索語を入力すると、当該検索語を用いて地点情報を検索し、ユーザに提示する。ユーザは、提示された地点情報を選択して目的地を設定する。地点情報には、検索語をヒットさせるための検索キーが設定されており、当該検索キーは意味単位を分割単位として区分されている。ナビゲーション装置は、目的地として設定した地点情報の検索キーの区分を用いてユーザが入力した検索語を区分し、これを学習キーワードとして記憶して学習する。このように、ナビゲーション装置は、ユーザが選択した地点情報の検索キーに倣ってユーザが入力した検索語を区分することにより、意味単位に区分された学習キーワードを生成することができる。
(もっと読む)
1,801 - 1,820 / 4,676
[ Back to top ]