
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
261 - 280 / 322
ナビゲーション装置

【課題】ユーザの不便さを解消することができるようにする。
【解決手段】ICカード4の記憶部4bには有料道路の利用履歴情報(特に料金所情報、利用明細情報)が記憶されている。ナビゲーション装置1の制御回路20がETC車載器3を通じて利用履歴情報をICカード4から読取ると、制御回路20はこの利用履歴情報に基づいて料金所を目的地として設定する。
(もっと読む)
プロンプター方式操作装置

【課題】操作制限されたスイッチ画像の位置と手画像の位置とが重なり合っている場合には、手画像の操作制限されたスイッチ画像との重畳部分を加工表示する。
【解決手段】タッチパネル125を表示するメイン画面200に手画像100等のサブ画面を重畳表示するプロンプター方式操作装置において、走行強制等で操作制限されたスイッチ画像201の位置と、メイン画面200上に表示すべき手画像100の位置とが重なり合っているかどうかを判定し、操作制限されたスイッチ画像201の位置と、メイン画面200上に表示すべき手画像100の位置とが重なり合っていると判定された場合には、運転者等の操作者にスイッチ画像201の操作制限を判り易く伝えるように手画像100の操作制限されたスイッチ画像201との重畳部分100aを削除して手画像100を表示する。
(もっと読む)
監視方法
【目的】監視対象となる人や物が異常な動きをした時に、その人や物の移動速度や移動範囲によらずに、その異常を判定して監視者に知らせることができる監視方法を、提供する。
【解決手段】監視サーバ2は、発信者端末が連続的に移動する時間が事前に登録された継続移動時間を超えたときに、受信者端末3へアラーム信号を送信する。また、監視サーバ2は、発信者端末が移動した距離が事前に登録されたTotal移動距離を超えたときに、受信者端末3へアラーム信号を送信する。
(もっと読む)
測位装置及び測位方法及びプログラム
【課題】厳しい受信環境下での乱れた走行軌跡を滑らかにし、測位精度の劣化を抑える。
【解決手段】測位装置100は、測位信号を送信する人工衛星から前記測位信号を受信して所定の情報を抽出し、前記所定の情報を使用して測位計算を行って緯度経度座標値を出力する測位計算部101と、初期値と初期誤差共分散行列と駆動雑音行列と観測雑音行列を読込み、前記初期値と前記初期誤差共分散行列と前記駆動雑音行列と前記観測雑音行列を使用して時間外挿値と伝播誤差共分散行列を計算し、前記測位計算部101が出力した緯度経度座標値を読込み、前記緯度経度座標値を地球楕円体面座標値に変換し、前記地球楕円体面座標値を使用して観測更新値と更新誤差共分散を計算し、前記地球楕円体面座標による観測更新値を緯度経度座標値に変換して出力する整形処理部102と、前記整形処理部102が出力した緯度経度座標値を表示する測位結果表示部103とを備える。
(もっと読む)
位置検出装置、その方法、そのプログラム及びその記録媒体
【課題】
移動体の位置を精度良く求める。
【解決手段】
マップマッチング位置算出部221は、地図情報121における道路上を車両が走行することを想定しつつ、GPS受信ユニット170による測位結果及び走行センサユニットによる検出結果に基づいて、マップマッチング位置を算出する。また、センサ位置算出部222は、走行センサユニットによる検出結果に基づいて、センサ位置を算出する。このセンサ位置は、当該測位結果又はマップマッチング位置の精度が高いと判断される場合には、センサ位置初期化部223により初期化される。こうして適宜初期化が施されるセンサ位置の精度がセンサ位置精度評価部224により高いと評価され、かつ、センサ位置とマップマッチング位置とがある程度以上離れている場合に、マップマッチング位置補正部225が、センサ位置を基準としてマップマッチング位置を補正する。
(もっと読む)
表示装置及びプログラム
【課題】操作部に入力された指令が運転者によるものなのか、助手席者によるものなのかを精度良く判定し、見る角度によって異なる画像を表示する表示装置の使い勝手を向上させる。
【解決手段】助手席側画面にランダムポインタ518を表示させ、助手席者によってランダムポインタ518が触られたことを契機にして、運転者操作状態(受け付けた操作指令を運転者の操作とみなす状態)から助手席者操作状態(受け付けた操作指令を助手席者の操作とみなす状態)へ移行する。このため、運転者ではなく助手席者についての操作開始意志を確実に判定でき、その後の助手席者による操作をスムーズに受け付けることができる。
(もっと読む)
車両用地図データ作成装置、及び、車両用地図データ更新装置
【課題】装置に必要とされるデータ容量を過大なものとせずに有用な地図データを作成することが可能な車両用地図データ作成装置を提供すること。
【解決手段】自車両において検出された道路に関する情報に基づいて地図データを作成する車両用地図データ作成装置であって、道路の両側の側端部を検出する検出手段と、検出手段により検出された道路の一方の側端部を基準にした他方の側端部の相対位置を表す相対位置データを作成する相対位置データ作成手段44と、を備えることを特徴とする。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
車両用走行制御装置
【課題】ユーザが意図せずに車両制御が作動してしまうのを防ぐ。
【解決手段】ナビゲーション装置4が自車走行路を誤認識している可能性があると判断すると、ナビゲーション装置4から得られる自車走行路情報、および、車両状況に基づいて行われる車両制御を禁止するとともに、車両制御の再開をユーザに促し、ユーザから車両制御を再開する指示が出されると、車両制御の禁止を解除する。
(もっと読む)
小型姿勢センサ
【課題】カルマンゲインやクォータニオンの算出を容易にして現実的な姿勢センサの実装を可能にし、さらに、小型化及び実時間処理を可能とする小型姿勢センサを提供することを目的とする。
【解決手段】移動物体の独立な3軸上の角速度を計測する角速度センサ101、移動物体の独立な3軸上の加速度を計測する加速度センサ102、移動物体の独立な3軸上の地磁気を計測する地磁気センサ103、角速度センサ101、加速度センサ102、及び地磁気センサ103の計測値を基にクォータニオンの推定値を算出する演算処理部104を備え、クォータニオン推定値をクォータニオンにより表現する三次元姿勢角として出力することを特徴とする小型姿勢センサを提供する。
(もっと読む)
固体の移動を推定するための方法
本発明は、3つの変数ベクトルによって定義される外乱を生成しうる媒体における固体移動体による方法であり、移動は、6つの変数ベクトルによって定義され、固体は、少なくとも3つの感度軸を有する加速度を感知する少なくとも1つのセンサと、少なくとも3つの感度軸を有する磁界を感知する少なくとも1つのセンサと、を備える。固体の移動を推定するための本発明の方法は、6つの変数の移動ベクトルと、3つの変数の外乱ベクトルからなる9つの変数ベクトル(Λ)を計算するステップ(B6)と、9つの変数ベクトルを推定されることになっている最大で5つの変数を有するベクトルに変換することができる9つの変数ベクトル(Λ)に重み付けを行うステップ(B6)と、を含む。 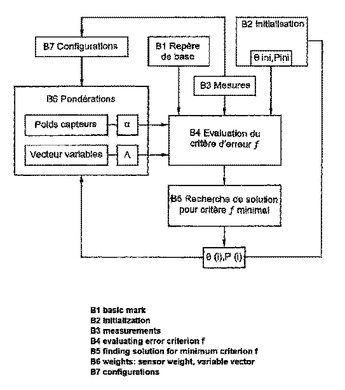 (もっと読む)
(もっと読む)
たて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法
【課題】本発明は、地球の自転角速度・重力を利用し、前記ドリルの旋回により生じる方位角誤差を除去し、抗掘削の方位精度を向上させることを目的とする。
【解決手段】本発明によるたて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法は、方位検出部(20)が検出する地球の自転角速度・重力を利用し、ドリル(2)の旋回により生じる方位角誤差を除去する構成と方法である。
(もっと読む)
車両の走行経路設定装置、ナビゲーション装置、及びプログラム
【課題】車両を通過目的地を経由して最終目的地まで走行させる走行経路を設定可能な装置において、交差点周囲に進路変更用の迂回路が配置された交通島内に通過目的地が設定された際に、次の目的地までの走行経路を最適に設定できるようにする。
【解決手段】複数の目的地が指定されると、現在地Sから最初の目的地G1、目的地G1から次の目的地G2へと走行経路を順に設定する装置において、通過目的地G1が交通島内にある場合には、交差点Cからみて次の目的地G2は右折・右折・直進の何れの方向にあるのかを判定し、目的地G2が右折方向にあれば、交通島で右折可能な迂回路L上に目的地G1を設定し(図a参照)、目的地G2が左折方向にあれば、交差点Cを左折した交差路上に目的地G1を設定し(図b参照)、目的地G2が直進方向にあれば、交差点Cを直進した走行路上に目的地G1を設定して、交通島内での経路(一点鎖線)を確定する。
(もっと読む)
情報削除支援装置、情報バックアップ装置および移動体用機器
【課題】記憶手段から情報を削除しても情報報知態様が変化することを防止し、記憶手段の記憶可能領域を効率よく使用できるようにする。
【解決手段】制御回路が、アクセス回数、走行回数、動作設定、目的地設定状態に応じて設定された削除優先度の高い複数の地図情報のうちの何れかの情報を地図情報記憶部の記憶可能領域から削除する(T10)。
(もっと読む)
移動体のセンサ補正装置、停止判定装置およびその方法
【課題】従来の速度センサを用いて、移動体が停止していることを判定し、停止判定をしている間に閾値を用いて、自立センサのバイアスやドリフト等の誤差を補正する方法では、センサの個体差から適切な閾値を設定することが難しい。
【解決手段】移動体の加速度を検出する加速度センサ11と、加速度センサ11のデータ系列のランダム性を判定する独立性判定手段12と、移動体が走行している路面の傾斜角を算出する傾斜角演算手段13と、加速度センサの補正値を格納する記憶媒体14と、加速度センサの補正値を算出する加速度センサの補正値演算手段15とを備え、移動体の走行状況を正確に判定し、路面の傾斜角を算出することで、閾値を用いなくともセンサを補正することが可能となる。
(もっと読む)
運転支援方法及び運転支援装置
【課題】路面状況に応じた運転支援を行うための運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援装置10は、道路データを記憶した地理データ記憶部20と、ディスプレイ25及びスピーカ26とを備えている。また、道路データに基づき、車両の進行方向前方の道路において、車両の振動の原因となる段差を検出するとともに、検出した段差を回避する進路を探索し、探索した回避進路に関する案内を、ディスプレイ25およびスピーカ26に出力するCPU11を備える。
(もっと読む)
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
(もっと読む)
協調制御データ配信方法、運転支援装置及び配信サーバ
【課題】走行支援を中止した地点において、走行支援を再開するための協調制御データ配信方法、運転支援装置及び配信サーバを提供する。
【解決手段】配信システム1は、道路データを記憶した地理データ記憶部、及び道路データに沿って車両の走行制御を行うCPUを備えた運転支援装置10と、運転支援装置10とネットワークNを介して接続された配信サーバ2とを備えている。運転支援装置10は、車両協調制御に沿わないメンテナンス地点を検出するとともに、検出したメンテナンス地点に関する検出データを、配信サーバ2に送信する。配信サーバ2は、各運転支援装置10から検出データを収集し、各検出データに基づいた更新データを運転支援装置10に配信する。
(もっと読む)
移動体の水平走行判定装置及び方法
【課題】移動体が走行している路面の状態を正確に判定することのできる移動体の水平走行判定装置を提供する。
【解決手段】移動体に搭載される機器の取付け角度を算出及び検証することにより、移動体が走行している路面の状態を判定することが可能となる。具体的には、移動体が直進している場合に加速度センサ12で検出される値から筐体が取付けられている角度の候補を算出する。そして、ある程度のデータ量の取付け角度の候補を蓄積させ、正規性の検定を行うことにより、取付け角度の範囲を設定する。次に、角速度センサ10で検出される値から筐体が取付けられている角度の候補を算出し、その値が設定した範囲内にある程度のデータ量蓄積されたとき設定した取付け角度の信頼性は高く、その後に算出した取付け角度の候補から移動体が走行している路面の状況を判定することができる。
(もっと読む)
移動体用位置推定装置
【課題】道路形状や周辺環境に影響されずに高精度に移動体の位置を推定する移動体用位置推定装置を提供すること。
【解決手段】移動体に搭載され、移動体の位置を推定する移動体用位置推定装置に、移動体に搭載された慣性航法センサ群(加速度センサ、ヨーレートセンサなど)の出力に基づいて移動体の位置を推定する第一の推定手段と、少なくともノード情報を含む地図情報を記憶した記憶手段と、ノード情報から予測された移動体の予想移動軌跡に基づいて移動体の位置を推定する第二の推定手段と、第一の推定手段により推定された移動体位置と第二の推定手段により推定された移動体位置とを合成処理して移動体の最終推定位置を決定する合成手段とを備える。
(もっと読む)
261 - 280 / 322
[ Back to top ]