
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
281 - 300 / 322
ナビゲーションシステム、携帯端末装置および出発、到着判別方法
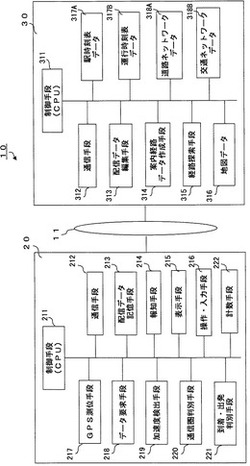
【課題】携帯端末装置に加速度センサを備え、利用者が乗車した交通機関が駅を発車、ないしは、駅に到着するイベントを容易判別でき、駅の到着前や発車後に適切な案内ができるようにする。
【解決手段】加速度センサを備えた加速度検出手段219を有する携帯端末装置20は、基地局との通信状態の履歴を記憶する通信圏判別手段220と、駅への到着、駅からの出発を、加速度検出手段の検出結果と、通信圏判別手段220の判別結果とに基づいて判別する到着・出発判別手段221とを備える。加速度検出手段219は、予め設定した所定の加速度範囲内の加速度が、所定期間継続した場合に交通手段の移動による加速度変化として検出し、到着・出発判別手段221は加速度変化が検出された際に、通信圏判別手段220に記憶された通信状態履歴を参照し、所定期間前の通信状態履歴が通信圏内であるか通信圏外であるかにより、駅への到着または駅からの出発を判別する。
(もっと読む)
地図情報配信システム

【課題】自車が走行する目的地に基づく所定領域の地図情報を目的地へと自車が走行する走行日時に基づくタイミングで更新することにより、全地図情報を更新することなく、特定の時期のみに走行するエリアの地図情報を必要なタイミングで更新を行うことを可能とした地図情報配信システムを提供する。
【解決手段】自車の走行履歴データを解析することにより解析データテーブル37を作成し(S6、S7)、現在ナビゲーション装置2に記憶されているナビ地図情報39の内、特に自車が過去に走行した目的地を含む2次メッシュの更新対象エリア52を、解析データテーブル37で当該目的地に対応付けられた期間に基づいたタイミングで更新を行う(S19)ように構成する。
(もっと読む)
車両用データ要否判定装置、車両用データ報知装置および路側通信機
【課題】利用者が必要と考えられるときに即座にデータを確保できるようにした
【解決手段】制御部は、車両が通信可能領域に進入すると共に、この車速が所定速度以下であることを条件として通信確立して路側通信機から配信されるデータを受信し(S1〜S3)、車両が店舗エリア内に進入したことを条件としてデータ確保して表示部に対して表示制御し(S10)、所定時間経過したとしても店舗エリア外に位置していると判定したことを条件としてデータ破棄する(S7〜S9)。
(もっと読む)
車両の挙動制御装置
【課題】 走行中と停車時にそれぞれヨーレートセンサのゼロ点補正を可能とした車両の挙動制御装置において、適切なゼロ点補正を行うことを可能とした車両の挙動制御装置を提供する。
【解決手段】 車両走行中で走行中のヨーレート補正値(YR0)演算条件が成立した場合には、走行中ヨーレート補正値YR0Mを求め(ステップS11、12)、停止中に停止中のヨーレート補正値(YR0)演算条件が成立した場合には、停止中ヨーレート補正値YR0Sを求める(ステップS15、17)。直近のYR0M補正時点からの経過時間を示すカウンタ値CTが所定のしきい値Thxを越えている場合には、YR0MをYR0Sで置き換える(ステップS18、19)。そして、YR0MとYR0Sとの差の絶対値Ydiffがしきい値Aを越えている場合には、車両挙動制御(ステップS26)の制御しきい値をかさ上げする(ステップS23、24)。
(もっと読む)
取付け角度算出装置
【課題】移動体が水平面を走行している状態もしくは車両が水平面に停車している状態のみではない実走行状態において、高度変化量の算出等の機能を有する他の高価なセンサーを用いることなく電子機器の筐体の取付け角度を精度良く算出することのできる取付け角度算出装置をを提供する。
【解決手段】取付け角度算出装置1は、移動体の角速度を検出する1軸の角速度センサ10と、車両の走行速度に応じてパルス周期が変化する車速パルスを発生する速度センサ11と、移動体の加速度を検出する加速度センサ12と、移動体の走行状況を判定するカーブ・直進判定手段14とを備え、取付け角度演算手段13は、移動体が直進しているとき取付け角度を算出し、カーブ走行時に算出した値が正確かどうか検証する。
(もっと読む)
携帯型地図表示装置およびその方法
【課題】専用の保持装置などがない使用者も的確なナビゲーション情報を得て有用に使用すること。
【解決手段】正面方位算出部21は端末の正面方位を算出する。進行方位算出部22は、移動方向検出部12からの携帯機器移動方向情報と、正面方位算出部21からの端末正面方位情報とから、携帯機器の進行方向がどの方位に向かって進行しているのかの情報を得る。選択部23は、端末移動状態検出部13からの情報をもとに、携帯機器が歩行者によって保持されていると判断されているときは正面方位算出部21から得た方位情報を選択し、携帯機器が車載状態であると判断されるときは進行方位検出部22からの方位情報を選択して計算部25に渡す。計算部25は、記憶部24に保存されている地図情報を読み出すとともに、選択部23からの表示方位情報およびGPS33が取得する緯度経度情報をもとに地図情報を処理し、表示部29に送る。
(もっと読む)
加速度センサのオフセット検出装置、加速度センサのオフセット検出方法及び加速度センサのオフセット検出プログラム並びにナビゲーション装置
【課題】本発明は、加速度センサのゼロ重力オフセットを高精度に検出できるようにする。
【解決手段】速度検出ユニット2は、GPS処理部4から位置情報PSを取得できる場合、(15)式に従い、実際に加速度センサ11から得られた実検出加速度αGrと、位置情報PSに基づく車両加速度αP、距離Dm、気圧PRに基づく高度変化量Dh及び重力加速度gを用いた演算を行うことにより、オフセット加速度αoを高精度に算出することができ、当該オフセット加速度αoを換算したゼロ重力オフセット値Vzgoを基に、加速度検出信号SAを精度良く検出加速度αGに換算することができる。
(もっと読む)
ナビゲーション装置及び方位算出方法
【課題】磁気センサの周囲の磁性体の影響により、磁気センサを用いた走行方位の検出の精度が悪化することを防ぎ、GPS信号を受信できない場合であっても、磁気センサを用いて走行方位の検出を行うことにより、走行位置を正確に特定することができるナビゲーション装置を提供する。また、磁気センサの出力値から精度よく走行方位を算出する方位算出方法を提供する。
【解決手段】GPS信号を受信可能である場合は、GPSの位置情報及びジャイロセンサの出力値から走行方位を算出する。GPS信号を受信不可能である場合は、磁気センサの出力値から方位算出テーブルを参照して走行方位を算出する。GPSの位置情報及びジャイロセンサの出力値から走行方位を算出した場合には、算出した走行方位及び磁気センサの出力値を磁気センサの算出テーブルの更新用データとして記録する。データが所定数蓄積された場合には、算出テーブルの更新を行う。
(もっと読む)
車両用運転支援装置
【課題】 走行に係り報知された事象に対する注意を何時まで払い続ければ良いのかを確実に把握できるようすること。
【解決手段】 送受信機10は、車両運転者に対して報知すべき事象(渋滞、混雑、速度規制、事故発生地点など)が存在する特定エリアまたは特定ポイントの位置を示す情報を含む道路交通情報を事象データとして取得する。制御回路2は、位置検出器3からの現在位置情報及び送受信機10からの事象データに基づいて車両の現在位置と前記特定エリアまたは特定ポイントとの位置関係を把握し、車両の進行方向に事象データにより示される特定エリアまたは特定ポイントが存在する場合に、その存在及び当該事象の種類を音声出力装置7により車両運転者に向けて報知すると共に、車両が当該特定エリアまたは特定ポイントを通過したときに、所定の通過メッセージを音声出力装置7により車両運転者に向けて報知する。
(もっと読む)
方位及び傾斜角検出装置、方位及び傾斜角検出方法、プログラム及び携帯端末装置
【課題】地磁気成分や重力成分を検出して方位及び傾斜角の情報を検出するにあたって、重力成分に含まれる誤差の影響を抑える。
【解決手段】測定データ取り込み手段702は加速度センサや磁気センサから測定データg,hを取り込む。第1の演算手段703は測定データg,hから方位角α0や仰角β0、地磁気伏角θ0を算出する。平均化手段704は地磁気伏角θ0を蓄積し平均値をとって地磁気伏角θとする。第2の演算手段705は測定データhと地磁気伏角θとから方位角αや仰角βを算出する。複数の解が存在する場合、それぞれの解を候補値(α1,β1)(α2,β2)とする。選択手段706は上記の値α0,β0を参考値とし、候補値(α1,β1)(α2,β2)から検出値(α,β)を選択する。
(もっと読む)
加速度センサの補正装置および加速度センサの出力値補正方法
姿勢角演算器(14)は、加速度センサ(10)の出力値からロボットの姿勢角を演算する。姿勢角比較器(16)は、レジスタ(20)に設定された特定姿勢における姿勢角と検出された姿勢角とを比較し、その差を補正値演算器(18)に出力する。補正値演算器(18)は差を解消するように零点補正器(26)あるいは感度補正器(28)に補正値を出力する。レジスタ(20)に設定される姿勢角は、入力器(22)から設定してもよい。  (もっと読む)
(もっと読む)
ナビゲーションシステム、ナビゲーション方法及びナビゲーション用プログラム並びに情報記録媒体
【課題】 独自のアルゴリズム等を用いて迅速且つ安全な経路として算出した当該経路を各車両において出力させて案内することが可能なナビゲーションシステムを提供する。
【解決手段】 通常の経路誘導は、地図データベースサーバMDBに記憶されているライブラリを用いて、タクシに搭載されたナビゲーション装置MTと地図データベースサーバMDBとの間のデータの授受により行う。一方、配車要求がタクシ会社備え付けのユーザ端末YTに寄せられた場合は、当該ユーザ端末YTから地図データベースサーバMDB内の上記ライブラリを読み出し、それを用いてユーザ端末YTにおいて独自アルゴリズムにより経路探索を行い、その結果をナビゲーション装置MTに伝送して表示させる。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
表示装置
【課題】 表示ユニットを回転・移動させることなく、表示ユニット自体を擬態化させる技術を提供する。
【解決手段】 速度情報およびアンダーバー51を図5(a)の第一段階から図5(e)の第五段階まで、1秒程度の間で連続的に変化させる。この結果、運転者は第二表示器35自体が上方向へ回転した(見上げた)かのように錯覚する。このため、第二表示器35が単に固定的に速度情報を表示させているだけの場合よりも運転者の注意を引くことができる。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
経路誘導ナビゲーション装置及び経路誘導ナビゲーション方法
【課題】
進行方向を検出することなく目的地まで移動体を誘導する経路誘導ナビゲーション装置及び経路誘導ナビゲーション方法を提供する。
【解決手段】
移動体の移動距離を求め、経路探索によって求められた目的地までの経路データ上で、移動距離だけ移動した位置を移動体の位置として求める。
【効果】
方向検知に伴う誤差の影響を受けない経路誘導ナビゲーションが可能である。
(もっと読む)
ナビゲーション装置
【課題】装置筐体に取り付けられた3軸加速度センサを用いて、距離センサによる走行距離の検出精度を高める。
【解決手段】ナビゲーション演算装置3は、車両への取り付け後最初に電源が投入され且つ車両が静止していることを条件に、車両に取り付けられたナビゲーション装置筐体の傾きを3軸加速度センサ4の前後、左右、鉛直方向の検出軸の出力として検出してその出力値を取付姿勢の基準値として記憶する。車両の走行中、3軸加速度センサ4の出力値の平均値と現在設定されている基準値とを加重平均することにより、基準値を車両水平状態での値に補正する。3軸加速度センサ4の出力値と補正した基準値とに基づいて車両の傾きを求め、その車両の傾きにより距離センサ6の出力による走行距離を補正する。
(もっと読む)
携帯装置
【課題】 歩行者が情報を表示する画面を目視しながら進行している場合であっても、進行方向に存在する物体を確実に検知することができる携帯装置を提供することを目的とする。
【解決手段】 利用者が進行中に情報を表示する画面を目視することが可能な携帯装置において、進行方向に基づいて所定の範囲内に存在する物体を検出する物体検出部17と、加速度を検出する加速度検出部16と、物体検出部17の物体の存在を検出する方向を変更する方向変更手段とを備え、加速度検出部16で検出した加速度に基づいて進行方向を算出し、方向変更手段は、算出した進行方向に、物体検出部17の物体の存在を検出する方向を変更する。
(もっと読む)
経路案内装置およびプログラム
【課題】現在地の確認と走行経路の方向確認を、視線移動を必要とせずに行うことができる経路案内装置を提供する。
【解決手段】現在地周辺の地図画像と走行経路βと矢印αを重ねて表示する。この矢印αは、現在地を基準とし走行経路βに沿って所定長さを有し、重ねて表示する際の透過率を調整することで半透過状態となり地図画像や走行経路βを視認可能となっている。この矢印αは、車両の走行により現在地が経路上を移動していくことに伴って移動して表示される。(a),(b)では走行経路βが直進状態であるため、矢印αの形状・長さは変化せず、(b)に示すように矢印αの矢尻が交差点に到達した後さらに車両が走行すると、(c)に示すように矢尻が左折する。つまり、矢印αは走行経路βに沿って表示されるので、矢尻部分は矢印αの基準が存在する道路から左折した道路に位置することとなる。
(もっと読む)
281 - 300 / 322
[ Back to top ]