
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
241 - 260 / 322
方位判別装置、方位判別方法及び方位判別プログラム
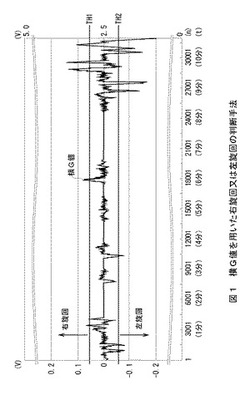
【課題】本発明は、簡易な構成で移動体の方位や位置を正確に求め得るようにする。
【解決手段】本発明は、車両に設置された二軸加速度センサ3により、当該車両が旋回したときの遠心力によって発生する移動体の進行方向と直交した横G値を検出し、横G値と所定の閾値TH1、TH2とに基づいて車両が右旋回したか左旋回したかを判別することにより、角速度センサを用いることなく単一の二軸加速度センサ3だけの簡易な構成で車両の旋回方向を正確に判別することができる。
(もっと読む)
運転支援装置

【課題】注意力が欠如した運転者が注意力を回復させた場合に、自身が置かれた状況を迅速かつ適切に認識できるよう支援する運転支援装置を提供すること。
【解決手段】運転支援装置Sは、運転者の注意力を判定する注意力判定手段11と、注意力判定手段11により運転者の注意力が欠如していると判定された場合に運転者に運転情報を通知する運転情報通知手段12とを備える。また、運転支援装置Sは、運転者の注意力を喚起する注意力喚起手段13を備え、注意力喚起手段13により運転者の注意力が喚起されたときに運転情報通知手段12が運転情報を通知するようにしてもよい。運転情報通知手段12は、複数の運転情報を所定の優先順位に基づいて順次通知し、運転情報には、先行車の有無に関する情報が含まれ、先行車がある場合には、先行車と自車との間の距離に関する情報が含まれる。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
ナビゲーション装置、停止検出方法及び停止検出プログラム
【課題】本発明は、車両100が停止しているときに、車両100が停止していることを確実に検出することができる。
【解決手段】本発明は、GPS信号に基づく位置信号PSからGPS速度を算出し、当該GPS速度から車両100が停止していると認識した際に、車両100に作用する加速度を表す横方向加速度信号SBを検出すると共に、当該横方向加速度信号SBの分散値を車両100の振動を表す横方向加速度分散値DPとして算出し、この横方向加速度分散値DPの平均値を第1の閾値である停止判定閾値SDとして設定することにより、当該横方向加速度分散値DPに基づいて停止判定閾値SDを設定するようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
ナビゲーション装置、位置検出方法及び位置検出プログラム
【課題】測位情報を取得できないときであっても、移動体の速度及び現在位置を高精度に算出できるようにする。
【解決手段】自律速度算出ユニット11は、クレードル着脱検出部16からの着脱情報CDを基に、ナビゲーション装置1がクレードル4に装着されている場合、学習した取付傾きを用いて高精度な自律速度Vtを算出することができ、一方ナビゲーション装置1がクレードル4から取り外されたことを認識した場合、学習したセンサ座標系が変化したことを認識して学習結果である加速度センサ14の取付傾きを用いた自律速度Vtの算出を中止するため、誤った自律速度Vtの出力を未然に防止することができ、ナビゲーションユニット12における現在位置の算出精度を低下させずに済む。
(もっと読む)
位置を推定する方法及び関連する装置
方法は、慣性位置情報、GPS情報、及び測距情報を、位置推定装置を使って受け取ることを含む。この方法は、慣性位置情報、GPS情報、及び測距情報の組み合わせに基づいて、位置推定装置の位置の推定を判断する。 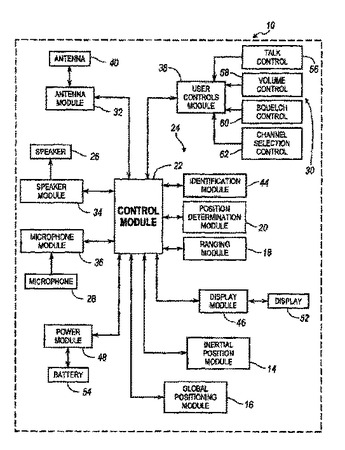 (もっと読む)
(もっと読む)
画像変換装置および画像変換方法
【課題】低い演算負荷にて正確に他車両を検出することができなかった。
【解決手段】自車両の進入先の車線を含む画像を取得し、前記自車両の進行方向と前記進入先の車線との角度を取得し、前記画像を俯瞰画像に変換するにあたり、前記角度に基づいて前記進入先の車線を前記俯瞰画像内で特定の方向に向ける変換処理を特定し、この変換処理によって俯瞰画像を取得する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
運転情報記録装置
【課題】 取付けの自由度を高め、作業工数を極力小さくすることができる運転情報記録装置を提供する。
【解決手段】 CPUは3軸方向の各Gセンサ出力値をチェックし、車両の前後方向および左右方向のGセンサ出力軸を確定すべく、Gセンサ出力値の大きい軸つまり縦方向の軸を破棄する。次にオフセット調整を実行し、CPUは使用する2軸を確定する。
(もっと読む)
車両用ナビゲーション装置
【課題】ユーザーに煩わしさを感じさせることなく、車両の移動経路を設定可能な車両用ナビゲーション装置を提供すること。
【解決手段】ECU12は、音声コントローラ10から取得した音声コマンドが「自宅へ帰る」であった場合、位置検出器1が検出した車両の現在位置と、内部メモリに記憶されたユーザーの自宅が位置する地点との距離を算出するとともに、算出した距離が予め設定された設定距離以上である場合には、確認動作を行う。これにより、ユーザーの自宅が車両の現在位置から大きく離れている場合にのみ、確認動作が行われることとなり、それ以外の場合には確認動作は行われない。その結果として、ユーザーに煩わしさを感じさせることなく、車両の移動経路を設定可能となる。
(もっと読む)
走行軌跡推定装置
【課題】走行軌跡を高精度に推定することができる走行軌跡推定装置を提供することを課題とする。
【解決手段】車両の走行軌跡を推定する走行軌跡推定装置1であって、所定の検出条件のときに車両の位置を検出する位置検出手段2と、位置検出手段2で検出した位置の情報を記録する情報記録手段5と、情報記録手段5に記録されている車両の位置の情報を用いて、所定範囲内に存在する車両の位置を平均化して走行軌跡を推定する走行軌跡推定手段6とを備えることを特徴とする。
(もっと読む)
作動制御装置、プログラム
【課題】音声認識結果を上手く利用することによって、ユーザからの操作受付を簡易なものにする。
【解決手段】音声認識関連ユニット60の音声認識部62が、音声入力部61を介して入力された「話者の発した音声」を分析し、認識辞書66を用いて認識した結果を認識結果として出力する。属性決定部63は、その認識結果に対応する機能属性及び機能修飾属性を、属性情報データベースの対応関係を用いて決定する。操作受付画面決定部64は、その属性決定部63において決定された機能属性及び機能修飾属に対応する操作受付画面を、機器操作情報データベースの対応関係を用いて決定する。そしてショートカットボタン作成部65は、操作受付画面決定部64によって決定された操作受付画面に対応するショートカットボタンを作成する。このショートカットボタンは、制御部59によって表示部56に表示される。
(もっと読む)
磁場センサーを用いて偏揺れを感知するためのシステム、および、前記システムを用いた携帯用の電子装置
電子装置、例えば携帯電話、ゲーム装置、およびこれらに類似した装置用の姿勢感知システムおよび動作感知システムを開示する。前記携帯用の装置に組み込むことができる前記システムは、2軸または3軸加速度計および3軸磁気コンパスを備える。前記加速度計および磁気コンパスからの電子装置の姿勢に関するデータは、最初に、姿勢角度(縦揺れ、横揺れ、および偏揺れ)および回転性の角振動数を算出する信号処理装置により処理される。これらのデータは、前記電子装置に関連する特定の応用プログラムのための入力信号に変換される。 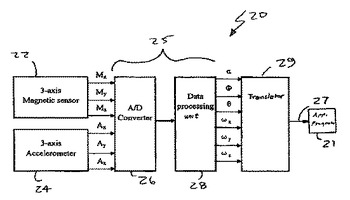 (もっと読む)
(もっと読む)
車両用再生装置
【課題】乗員が、表示装置に表示された画像を視認できない場合に、再生中のコンテンツデータの内容を把握できなくなることを防止できる車両用再生装置を提供すること。
【解決手段】ナビゲーション装置1は、パーキングブレーキの状態を示す状態情報を検出するパーキングブレーキ検出部26を備えており、コンテンツデータを再生中には、パーキングブレーキ検出部26により検出された状態信号に基づいて、車両が走行中であるか否かを判断し、車両が走行中であると判断すると、音声出力部24を介して出力される音声言語を、予めEEPROM48に記憶された走行時言語情報の音声言語(乗員が容易に理解可能な言語)に切り換える。
(もっと読む)
描画システム
【課題】運転者が一目瞭然で方面標識に関する交差点での進行方向を知ることが可能となる描画システムを提供する。
【解決手段】ナビゲーションECU3は、方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報に基づいて、前方撮像用カメラ14の撮像画像内の方面標識を画像処理により認識し、自車両の進行方向に合致する方面名称や矢印マークをパターンマッチング等により認識する(S6)。また、ナビゲーションECU3は、該撮像画像内の方面標識上における進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係を求め、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、自車位置や自車方位からレーザ照射角度を決定し、レーザー描画装置4により所定照射形状のマークを描画する(S7〜S9)。
(もっと読む)
位置検出装置及び位置検出用プログラム
【課題】車両の位置検出システムとしての冗長性(対故障性)を向上させつつ、より正確な位置検出が可能な位置検出装置及び当該位置検出用のプログラムを提供する。
【解決手段】一つの車両の位置を示す位置情報を、相互に異なる位置検出条件の下で夫々生成する二つのGPSセンサ11及び12と、各GPSセンサ11及び12により生成された各位置情報夫々における位置検出精度につき、当該位置検出精度が高い方の位置情報を用いて車両の位置を算出する位置検出部2と、を備える。
(もっと読む)
車両位置検出装置
【課題】演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出すること。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
(もっと読む)
241 - 260 / 322
[ Back to top ]