
Fターム[2F129BB38]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 角速度センサ (105)
Fターム[2F129BB38]に分類される特許
21 - 40 / 105
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
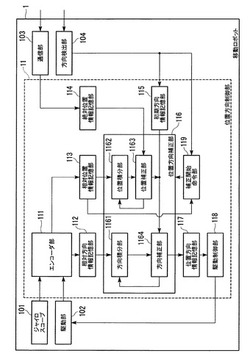
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
ナビゲーションシステムおよび車載装置

【課題】自車両の状態変化によって自車位置の予測精度が低下することを防止しつつ、車載装置によって表示される自車位置と実際の自車位置とのずれを低減すること。
【解決手段】車載装置の走行距離算出部が、自車両から出力される車速パルスと車速算出用係数とを用いて算出される自車速度に基づき、所定区間における第1の走行距離を算出し、携帯端末装置の走行距離算出部が、所定区間における自車両の第2の走行距離を測位衛星から提供されるGPS情報に基づき算出し、学習部が、第1の走行距離と第2の走行距離との比較結果に基づき、車速算出用係数を補正し、携帯端末装置の自車位置予測部が、車速パルスと補正された車速算出用係数とを用いて算出された自車速度に基づき、自車位置を予測するようにナビゲーションシステムを構成する。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】追加のセンサを用いることなく正確な推定航法を行うことができる車両用推定航法装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から当該車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、前記車両に装着されたタイヤ回転情報検出手段から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを算出する第2パラメータ算出手段とを備えている。
(もっと読む)
車載用電子機器
【課題】スタンバイ状態の暗電流を低減して車両への実装を容易化できる自車方向補正機能を有する車載用電子機器を提供する。
【解決手段】自車方向を検出する機能を有し、回転角度検知部と自車方向補正部とを備えた車載用電子機器において、さらに振動検出部を備え、アクセサリ電源がオフになった後、前記回転角度検知部への電源供給がオフとされてスタンバイ状態となり、前記振動検出部が振動を検出せず前記アクセサリ電源がオフの間はスタンバイ状態が継続され、スタンバイ状態において前記振動検出部が振動を検出すると、前記回転角度検知部へ電源が供給されて前記回転角度検知部が起動し、前記回転角度検知部が回転角度を検知し、前記アクセサリ電源がオンになると、前記自車方向補正部は、前記検知された回転角度に基づき前記アクセサリ電源がオフになった際の自車方向を補正する構成とした。
(もっと読む)
角速度算出装置、ナビゲーション装置、角速度算出方法
【課題】ロール方向の角速度を計測しない状況で、ロール方向の傾斜によるヨー方向の角速度計測値の誤差を補正することが可能な角速度算出装置を提供する。
【解決手段】車両2のヨー方向の角速度を計測した後に、車両2の旋回走行により発生する遠心力f1を算出し、その遠心力によるロール方向のモーメントを外力とする運動方程式からロール角θを算出する。そして角速度の計測値をcosθで除算することで角速度を補正する。
(もっと読む)
携帯機器
【課題】各種センサを備えた携帯機器の使用時の姿勢角度の変動を精度良く検出でき、正確にセンサからの出力を補正することが可能な携帯機器を提供する。
【解決手段】携帯機器の3軸方向への加速度を検出する加速度センサ131と、3軸方向の加速度成分に基づいて、前記携帯機器の回転軸を検出する回転軸検出部182と、検出された回転軸周りの携帯機器の回転角を算出する回転角算出部183と、算出された回転角の大きさに応じて、3軸方向の加速度成分の論理値を交換する軸交換手段133と、を備えるように構成する。
(もっと読む)
車両経路判定方法およびナビゲーション装置
【課題】走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供すること。
【解決手段】自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜算出部6で判定された傾斜属性103と、記憶部13から読み出した分岐経路傾斜属性101と本線経路傾斜属性102とをもとに参照し、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
(もっと読む)
ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステム
【課題】本発明は、ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステムを提供する。
【解決手段】ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステムが、ここに開示される。本慣性ナビゲーションシステムは、移動体の移動情報に基づいて上記移動体の位置および向きを計算するための軌道計算器と、上記軌道計算器に接続され、参照道路情報に基づいて上記移動体の位置および向きを修正するための誤差修正ユニットと、上記誤差修正ユニットに接続され、道路網の地理情報を格納し、上記道路網の地理情報に従って上記参照道路情報を提供するための記憶ユニットとを備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
信号チャネル間の相対的な処理遅延を補償することによる慣性センサ・データの正確な獲得のための方法および装置
本明細書において開示される主題は、複数の座標軸に関係してモバイルデバイスの物理的移動を検出することに適合した複数のセンサによって生成される複数の信号を受信するためのシステムおよび方法に関係する。受信された信号のうちの少なくとも1つがデジタル化される時間は、遅延され、共通の時点に関係して同期される受信された複数の信号のデジタル化されたバージョンの出力を提供する。 (もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
ナビゲーション装置
【課題】方位を変化させる施設に関する情報などを用いずに、方位を正しく算出する。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
角速度センサ補正装置、角速度算出装置、角速度センサ補正方法、角速度算出方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
航法装置及び推定方法
【課題】航法装置の推定の精度を劣化させることなく、計算量を少なくする。
【解決手段】姿勢角外挿計算部122は、角速度センサ111が計測した移動体座標系における移動体800の角速度ωbに基づいて、慣性座標系における移動体800の姿勢角qnを計算する。速度増分計算部126は、加速度センサ112が計測した移動体座標系における移動体800に加わる加速度abと姿勢角qnとに基づいて、慣性座標系における移動体800の速度の増分Δvnを計算する。速度外挿計算部127は、速度の増分Δvnに基づいて、慣性座標系における移動体800の速度vnを計算する。速度減算部130は、速度vnと、GPS受信機113が計測した慣性座標系における移動体800の速度vgとの差dvを計算する。第一推定部140は、姿勢角qnと、速度の増分Δvnと、速度の差dvとに基づいて、角速度の誤差bgと、姿勢角の誤差εとを推定する。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
自己較正型ジャイロスコープ・システム
【課題】ジャイロスコープ・システムにおいて、倍率誤差及びバイアス誤差を最少に抑える。
【解決手段】相互に非平行配列の検知軸130a〜130dを有する複数のジャイロスコープ110a〜110dを用いる。ジャイロスコープの数は、ナビゲーションに必要な軸の数よりも少なくとも1つ多い。プロセッサが、モード逆転技法を用いて、選択したジャイロスコープについてのバイアス誤差の推定値を得、ランダム閉ループ倍率技法を用いて、選択したジャイロスコープについて倍率誤差の推定値を得る。モード逆転技法では、各ジャイロスコープは較正のために一時的にオフラインとし、その後通常動作に戻す。少なくとも1つの冗長なジャイロスコープが設けられているので、選択したジャイロスコープがオフラインになっているとき、残りの動作中のジャイロスコープからの速度情報を用いれば、オフラインのジャイロスコープの軸を中心とする基準速度を導き出すことができる。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、空間安定装置への風の影響が考慮されていないので、この風がジンバル機構の駆動制御に影響を及ぼし、前記駆動制御の精度が低下してしまう。
【解決手段】本発明による空間安定装置の制御方法は、第1及び第2風速検出器17,18によって検出された旋回方向13a及び俯仰方向13bに沿う風速に基づいて、旋回方向13a及び俯仰方向13bに沿うジンバル機構15への外乱トルクを算出し、算出した外乱トルクに基づいてジンバル機構15の駆動制御を補正する構成である。
(もっと読む)
車載角速度検出装置
【課題】角速度をより適正に計測すること。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
(もっと読む)
21 - 40 / 105
[ Back to top ]