
Fターム[2F129BB38]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 角速度センサ (105)
Fターム[2F129BB38]に分類される特許
61 - 80 / 105
車載用角速度検出装置
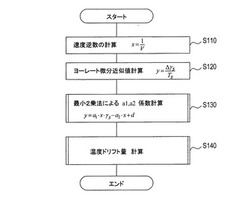
【課題】GPSとの通信が不可能である状況下でも、ジャイロセンサの出力値と車両速度値との相関関係から、周囲温度の変化によって出力値が変化してしまういわゆる温度ドリフトを軽減すること。
【解決手段】車載用角速度検出装置1の角速度補正部14が、ヨーレート値γと車両速度値Vとの相関関係に基づいて温度ドリフト値γdを算出することから、GPSとの通信状態によらずに、温度ドリフト値γdを算出可能である。したがって、GPSとの通信が不可能である状況下でも、ジャイロセンサの出力値と車輪速度の関係から、上述の温度ドリフトを軽減することができる。
(もっと読む)
位置検出装置及び位置検出方法

【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
携帯ナビゲーション装置
【課題】特定対象者が所定の位置に停止した状態のままであっても、仮想特定対象者の方向を地図上に正確に表示することにある。
【解決手段】地上における特定対象者の位置及び方向を仮想特定対象者Aの位置及び方向として携帯電話機(携帯端末)10の液晶画面(表示部)12bに地図Bと共に表示するものであって、仮想特定対象者Aの方向は、特定対象者が履くことになるシューズ(履物)2に設けられた方位センサ3aによって検出された方向に基づいて定められるように構成している。
(もっと読む)
自己位置標定装置、自己位置標定方法および自己位置標定プログラム
【課題】道路上の白線や、道路標識といった既存の道路インフラを利用して、自己位置標定装置の標定精度を向上させる。
【解決手段】車両に搭載した自己位置標定装置100において、DR演算部3はデッドレコニングにより車両位置を算出する。擬似距離残差計算部22は擬似距離と衛星軌道パラメータに基づく衛星−車両間の距離とで擬似距離残差を算出する。カメラ7は車両前方の道路を撮像し、画像処理部8は画像に映る白線の方位角を算出し、白線方位角取得部23は白線情報データベース9から白線の方位角を取得し、白線方位角残差計算部24は画像処理部8が算出した白線の方位角と白線方位角取得部23が取得した白線の方位角とで方位角残差を算出する。拡張カルマンフィルタ6は擬似距離残差と方位角残差とを観測量として入力し、DR演算部3の測位結果の誤差を推定する。DR演算部3は拡張カルマンフィルタ6の推定誤差で測位結果を補正する。
(もっと読む)
飛しょう体及び飛しょう体に搭載される慣性装置の調定方法
【課題】 飛しょう体が備える慣性装置の調定を短時間で行うこと可能にする。
【解決手段】 飛しょう体の胴体外周に複数設けられた赤外線センサからの出力情報に基づき前記飛しょう体のロール角を求めるロール角推定手段と、前記飛しょう体の位置座標とピッチ角とヨー角とを算出するGPSジャイロとを有する姿勢角初期推定手段と、前記姿勢角初期推定手段から入力した前記ロール角に基づき、前記GPSジャイロがGPS衛星からのGPS信号を受信可能な姿勢に制御する操舵装置制御手段と、前記飛しょう体に搭載した慣性装置から入力した慣性情報と、前記姿勢角初期推定部から入力した前記飛しょう体の位置座標とロール角とピッチ角とヨー角とに基づき、前記慣性装置を調定して前記飛しょう体の位置と姿勢角を算出する航法装置とを備えるようにした。
(もっと読む)
車両用角速度センサの零点補正装置
【課題】車両に搭載される角速度センサの零点補正精度を向上させるとともに、車両が実際に使用されている状態での零点補正処理の頻度を上げる。
【解決手段】オフディレイ回路42は、イグニッションスイッチ50のオフ後にオン状態になっている所定時間にバッテリ40からイグニッションスイッチ50を迂回して3軸角速度センサ22、3軸加速度センサ24に電源+Bを供給する。この所定時間に車両停止状態検知センサ14(例えば、燃料計)の出力変化に基づいて車両が停止していると判断したとき、零点補正手段30が、3軸角速度センサ22の出力を更新後の零点補正値として記憶手段28に記憶し、更新後の零点補正値により3軸角速度センサ22の検出値を補正する。
(もっと読む)
ナビゲーション装置、傾斜角を用いた角速度補正装置および方法
【課題】車両の傾きが存在する環境でも、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができ、自律航法精度を向上させることができる「ナビゲーション装置、傾斜角を用いた角速度補正装置および方法」を提供する。
【解決手段】加速度傾斜角θaccおよびGPS傾斜角θgpsからセンサ傾斜角θsensorと車両傾斜角θcarとを算出し、この2つの傾斜角θsensor,θcarに基づいて角速度ωgyroを補正することにより、車両が傾いているときでも、角速度センサ4の感度補正と同時に加速度センサ1のゼロ点補正を行うことができるようにする。また、このように同じ演算の中で角速度センサ4の感度補正と加速度センサ1のゼロ点補正とを行うことにより、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができるようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車
【課題】車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現できるようにすることを課題とする。
【解決手段】リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶しておき、設定された2点間の経路計算を実行して、ノードの接続点に関して特別コストの存在有無を判断し、特別コストの存在が確認された場合、車種別対応表を参照してコストの修正を実行する。
(もっと読む)
ジャイロセンサモジュールおよび角速度検出方法
【課題】検出軸の取付角度の変化にかかわらず、検出精度の向上したジャイロセンサモジュールおよび角速度検出方法を提供すること。
【解決手段】センサ出力補正回路32に含まれる第1、第2のオフセット調整回路36,37によって、第1角速度ω1および第2角速度ω2を、車両が停止している時の第1のジャイロセンサ10の補正値B1および第2のジャイロセンサ20の補正値B2を減じることによって、第1角速度ω1”および第2角速度ω2”に換算できる。したがって、車両の移動時のより正確な第1角速度ω1”および第2角速度ω2”を得ることができる。
(もっと読む)
角速度センサの信号補正装置
【課題】正確な補正処理を可能とした角速度センサの信号補正装置を提供する。
【解決手段】車両が現在走行中の道路について地図データ入力部から入力される曲率情報と、車速センサ等により算出される車両の車速情報とに基づいてジャイロスコープから得られる角速度値ω1を補正する(ステップT1〜T9)。
(もっと読む)
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法
本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
位置検出装置、位置検出方法、位置検出プログラム及びナビゲーション装置
【課題】電源投入後に現在位置を表示できるまでの時間を短縮できるようにする。
【解決手段】ナビゲーション装置1は、静止状態であり、且つ当該ナビゲーション装置1がクレードル4に装着されているときに、環境情報処理部30により地磁気値TM、位置情報PS及び方向情報DRを記憶部13に記憶させておき、動作停止状態から電源が投入され起動した際、クレードル4に装着され、静止状態であり、且つ記憶部13に記憶している地磁気値TMと現在の地磁気値TMとの差分が所定閾値未満であれば、周囲環境が変化していないものと判定し、記憶部13に記憶している電源切断前の位置情報PS及び方向情報DRを現在の位置情報PS及び方向情報DRとして復元することにより、電源投入後直ちに現在位置を認識することができるので、当該現在位置に応じた地図画面や経路案内画面等を提示することができる。
(もっと読む)
移動体姿勢計測装置
【課題】従来に比べて移動体の姿勢の計算が簡易なものとし、また、移動体の姿勢の算出値の精度を向上させる。
【解決手段】移動体に設けられて衛星の信号を受信する基準アンテナ11及びn個(1,2,3,…)のユーザアンテナ12で受信した衛星の信号から前動体と前記衛星との位置関係を算出する。また、各アンテナで受信した衛星信号の搬送波位相を測定する。そして、この搬送波位相から一重位相差又は二重位相差を計算する。基準アンテナとユーザアンテナとの位置関係、移動体と衛星との位置関係、及び一重位相差又は二重位相差の関係に基づいて、一重位相差又は二重位相差に対する未知の整数値アンビギュイティ、移動体の未知の姿勢成分、及び一重位相差又は二重位相差についての初期値を算出する。非線形推定法を利用して初期値を収束させることにより、未知の整数値アンビギュイティ及び移動体の未知の姿勢成分を算出する。
(もっと読む)
慣性センサ、及び慣性センサの製造方法
【課題】センサとして安定した特性が得られ、しかも検出軸を所定角度に設定できる慣性
センサを提供することを目的とする。
【解決手段】検出軸方向の物理量の大きさを検出する検出素子である水晶振動素子11、
水晶振動素子11を収納するセラミックパッケージ17、セラミックパッケージ17の外
部底面に形成された実装電極18、及び実装電極18に接続され検出軸を検出すべき正規
方向から所定角度傾斜させる金属球2を備えたセンサ本体10と、金属球2を含む実装電
極18と接続されるリードフレーム4と、センサ本体10をモールドする樹脂5とを備え
るようにした。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
対面誘導装置、位置情報管理装置、対面誘導システム、対面誘導方法
【課題】人間同士の対面を実現する。
【解決手段】対面誘導装置1の現在位置情報取得部10が、対面誘導装置1の現在位置を示す現在位置情報aを取得して、送信手段17が現在位置情報aを対面誘導装置2に送信する。対面誘導装置2の他機位置情報取得部28が、現在位置情報aを取得する。現在位置情報取得部20が、対面誘導装置2の現在位置を示す現在位置情報bを取得する。目標位置設定部21が、現在位置情報aが示す対面誘導装置1の位置を目標位置として設定し、向き決定手部22が、目標位置と現在位置情報bが示す対面誘導装置2の現在位置とから、この現在位置から目標位置に向かう向きを決定して、制御部23が、この向きを有する力ベクトルを力ベクトル発生部24によって発生させる制御を行う。力ベクトル発生部24が、力覚として感知される力ベクトルを発生させる。この力ベクトルが人間に感知され、人間の誘導に供される。
(もっと読む)
車載用ナビゲーション装置
【課題】旋回走行を要する自走式の駐車場における旋回走行によって、自車方位および自車位置の誤差が発生したとしても、これらの誤差を迅速かつ適切に補正することができ、自車方位精度および自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】自車位置・方位補正手段29,38により、駐車場における自車両の旋回走行の中心点を回転中心とした回転処理手段37による回転後の所定範囲の走行軌跡を用いて、自車方位の補正および自車位置の補正を行うこと。
(もっと読む)
車両用ナビゲーション装置
【課題】 車両が勾配路に差し掛かった際に、3Dジャイロセンサの0点ドリフトとの影響を軽減し、勾配路への進入における判定が遅れずにユーザを混乱させることなく車両の現在位置を判定することができる車両用ナビゲーション装置を提供する。
【解決手段】 車両の勾配角度Aを検出して出力する車両勾配角度検出手段と、車両のサスペンション機構19に設けられ、当該サスペンション機構の伸縮変化によって車両の走行している道路の勾配変位Bを検出する勾配変位検出手段と、車両勾配角度検出手段からの勾配角度A、並びに車両のサスペンション機構19に設けられた勾配変位検出手段からの勾配変位Bの双方の情報を取り込み、かつ、地図情報における車両の現在位置に対応する地点の道路勾配角度Dの情報を照合することに基づき、車両が平面視で重複又は隣接する道路のうち勾配路に移行したか否かを判定する判定手段と、を含むことを特徴とする。
(もっと読む)
移動体制御装置及び移動体制御方法
【課題】軽量、小型で、かつ安価なセンサ等を利用して複合航法システムを実現できる移動体制御装置を提供する。
【解決手段】慣性航法データと測位データとに基づいて状態推定フィルタ演算を行い、移動体の位置、姿勢、速度の情報を出力する。このとき、慣性航法データについての状態推定フィルタ演算における、移動体の位置、姿勢、速度の各誤差を演算するにあたり、位置、姿勢、速度の各々を表す状態変数に係り、それよりも要素数の少ない状態変数で特定される微小変化単位四元数として表示された誤差情報を用いて、位置、姿勢、速度の各誤差を演算し、当該誤差情報を乗じることで位置、姿勢、速度の情報が補正され、移動体の制御に供される移動体制御装置である。
(もっと読む)
ナビゲーション装置
【課題】未登録道路を含む道路上の走行軌跡から未登録道路の座標を自動的かつ正確に検出して道路データを作成できるナビゲーション装置を提供する。
【解決手段】センサ1〜3からの信号に基づき車両の挙動を推測する測位手段41からの測位データと道路地図データ記憶手段43からの道路データとを照合して車両の現在位置を同定し、マッチング、ペンディングまたはフリー状態を表す照合結果を出力する道路照合手段42と、照合結果がフリー状態である区間の前後でマッチング状態にあった登録道路上に未登録道路の検出開始地点Aおよび検出終了地点Bを設定し、測位データから生成された地点A−B間の走行軌跡をそれらの間の登録道路の座標に一致するように座標変換した走行軌跡中の登録道路と不重複部分から未登録道路の座標を検出する未登録道路検出手段45と、検出された未登録道路の座標から道路データを生成する道路データ生成手段46を備えている。
(もっと読む)
61 - 80 / 105
[ Back to top ]