
Fターム[2F129EE95]の内容
航行(Navigation) (246,646) | 出力/表示 (50,983) | 出力/表示の対象 (25,611) | 危険回避 (804)
Fターム[2F129EE95]に分類される特許
361 - 380 / 804
ガイダンス付き公開エリア地図

【課題】公開エリア地図を用いたガイダンス及び経路選択方法を提供する。
【解決手段】公開エリア地図において選択された目的地を識別する段階を含む。公開エリア地図は、人が歩き回る現実世界エリアを表すレイアウトの画像を含む。公開エリア地図は、グリッドに関連付けられる。ルートは、グリッドの関数として公開エリア地図内の原点から選択された目的地まで計算される。計算されたルートに対応するオーディオ又はテキストコンテンツが提供される。
(もっと読む)
ナビゲーション装置

【課題】ICカードの装着状態や有料道路およびインターチェンジにおけるゲートがETCに対応しているかに応じて好適なタイミングで適切な案内メッセージを出力する。
【解決手段】地図情報および道路情報を取得する地図情報取得部13と、現在位置を検出する位置検出部12と、自動料金収受用の情報を記憶したICカード23の装着の有無を検出するカード装着状態検出部25と、検出された現在位置から所定範囲の地図情報および道路情報に基づき車両が入ロゲートまたは料金ゲートから所定距離手前に接近したことを判断した場合に、地図情報または道路情報に含まれるレーン情報によって定義されている入口ゲートまたは料金ゲートのETC対応の有無とICカードの装着の有無との4種類の組み合わせに基づいて案内メッセージを生成する制御部10と、この生成された案内メッセージを音声または表示によって出力する出力部14とを備えている。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
安全運転評価システム及び安全運転評価プログラム
【課題】一時停止地点において車両を安全に停止させるためのような適切な運転を行なおうとする意欲を、運転者に高く維持させることができる安全運転評価システムを提供する。
【解決手段】一時停止地点の手前の所定位置において、現在の車両の運転状況に基づいて当該一時停止地点で安全に停止することができない可能性があると判断される場合に、運転者に対して注意喚起を行なう注意喚起手段16と、車両が通過した一時停止地点の数に対応する通過地点数に占める、注意喚起がなされた一時停止地点の数に対応する注意喚起数の割合である注意喚起割合を算出する割合算出手段22と、注意喚起割合に基づく評価情報を取得する評価情報取得手段23と、を備えた安全運転評価システム。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】制限エリアに基づいて適切な状況下で車載通信装置の通話を支援することを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車の走行予定経路を取得し(S2)、走行予定経路上にあるハンズフリー通信を制限すべき制限エリアを特定し(S3)、自車の現在位置と制限エリアとの位置関係を取得し(S5)、車載ハンズフリーシステムにおける通話状態を取得し(S6)、着信に対するユーザ応答態様を取得し(S7)、取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2を制御を行う(S8)ように構成する。
(もっと読む)
安全走行用の自動支援機器の制御装置
【課題】運転が不慣れな道路の走行時に、ライト、ワイパ、暗視カメラ等の自動支援機器の作動を制御して安全性を高める。
【解決手段】自車位置情報取得部と、既に走行した道路の走行回数を記憶している走行履歴記憶部と、カーナビゲーション装置で入力された目的地に応じて設定された走行経路に含まれる道路区間または走行区域が、運転が不慣れな道路区間または走行区域であるかを、前記走行履歴記憶部を参照して判定する判定部と、前記判定部で運転が不慣れであると判定された場合に、ライト、ワイパおよび暗視カメラのいずれか1つを含む安全走行用の自動支援機器の作動条件の閾値を緩和する閾値に変更し、前記道路区間または走行区域を走行する直前に前記自動支援機器を作動させる機器制御指令形成部と、前記機器制御指令形成部からの機器制御指令を前記自動支援機器へ送る送信部と、を備えていることを特徴とする安全走行用の自動支援機器の制御装置を提供する。
(もっと読む)
車載用ナビゲーション装置及び交差点進入案内方法
【課題】信号機が設置されていない交差点において適切な走行案内をすることが可能な「車載用ナビゲーション装置及び交差点進入案内方法」を提供すること。
【解決手段】車載用ナビゲーション装置は、情報出力手段と、地図データが格納された記憶手段と、位置検出手段と、撮像手段と、少なくとも位置検出手段により検出された自車両の位置及び前記地図データ、又は撮像手段により撮像された画像データを基に予め進入優先順位が定められた交差点を検出する(S11)制御手段とを有する。制御手段は、撮像手段により交差点に進入する車両を捕捉し(S13)、車両の交差点への進入順位を推定(S14)して情報出力手段に情報出力させ(S15)、自車両の進入順位になったときに交差点への進入を促す(S19)。制御手段は、撮像装置で撮像した画像を解析して車両から交差点までの距離を検出し、距離の短い順に優先順位を付与する。
(もっと読む)
車両用走行支援装置
【課題】 ドライバの実際の操作や個々の交差点の状況に応じた危険予測を行うことで、より適切な危険警告を行えるようにすること。
【解決手段】 自車と交差点との距離が所定値以下となったとき、急ブレーキ等のドライバの操作を検出する(33)。次に、交差点ノード情報、自車と交差点との距離、ドライバの操作の検出結果に応じて、当該交差点の危険度を設定する(40)。当該交差点を通過する際に、設定された危険度に応じた警報を行う(41,42)。
(もっと読む)
車両制御システム
【課題】
停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供する。
【解決手段】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は一時停止場所の位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
(もっと読む)
運転者が始動する車両対車両の匿名警告装置
記述的車両対車両警告メッセージを通信するための、運転者始動警告装置が述べられている。本装置は自動車の内部で利用することができて、車両の運転者または乗客からの入力を受信するインタフェースを含むことができる。本装置はまた、車両対車両通信構成要素を含み、この構成要素は、入力の受信に応答して匿名のメッセージを生成し、範囲内にある他の車両に対してその匿名のメッセージをブロードキャストする。この匿名のメッセージには、道路ハザードの場所情報等の、運転者または乗客によって観察されたイベントに関する電子データが埋め込まれている。装置は、そのメッセージの受信に基づいて、近づく任意の危険または他のイベントに関して運転者に警報するか否かを判定することができる。メッセージの中に含まれる場所情報は、それを使用して、有効性に基づいてメッセージをフィルタリングすることができる。メッセージはまた、他の車両に中継されて、移動している自動車の間での情報拡散を最適化することができる。 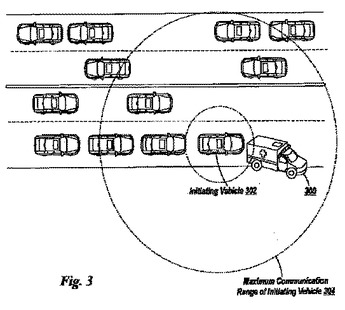 (もっと読む)
(もっと読む)
情報報知装置、その制御方法及びその制御プログラム
【課題】交差点において、信号機及び一時停止情報が存在しない場合であっても、ユーザに交差する道路から自車以外の車両の走行があり得る旨の注意を促すことが可能な情報報知装置を提供する。
【解決手段】交差点情報読出手段32は、自車位置検出手段31により検出された自車位置が存在する道路データ上における直近の交差点情報を読み出す。信号機判定手段33は、その交差点に対応する箇所に信号機が設けられているかを判定する。
信号機情報が存在しないと判定された場合に、一時停止情報判定手段34は、交差点情報読出手段32を通じて読み出された交差点において、一時停止情報が存在するかを判定する。一時停止情報が存在しないと判定された場合に、報知手段35は、この交差点に一時停止情報が存在しない旨の警告情報を表示案内部7や音声案内部9に出力する。
(もっと読む)
電子式案内システムとプログラム
【課題】GPSと、無線タグから位置情報を取得する携帯端末の省電力化を図る。
【解決手段】定期的に位置情報を送信する無線タグ2と、前記無線タグ2から位置情報を受信する無線タグ受信手段31と、GPS受信手段32と、第2の制御手段33と、前記無線タグ2からの位置情報もしくは前記GPS信号から算出した位置情報を元に、その位置に応じたスポット情報を外部から取得する広域通信手段34と、表示報知手段35とを具備した携帯端末3とから構成された電子式案内システムにおいて、GPS信号を受信したときに前記無線タグ受信手段31の動作を停止し、あるいは、無線タグ2からの位置情報を受信したときには前記GSP受信手段32の動作を停止する電子式案内システム。
(もっと読む)
車両用警報装置
【課題】車両進行方向にある交差点付近の停止線に関する警報をより適切なタイミングで出力可能な車両用警報装置を提供すること。
【解決手段】車両進行方向にある交差点付近の停止線に関する警報を出力する車両用警報装置10において、停止線から交差点までの距離L1を検出する距離検出手段24と、車両が走行する道路の制限速度VLを検出する制限速度検出手段26と、距離検出手段24及び制限速度検出手段26の検出結果に基づいて、警報の出力タイミングTaを変化させる変化手段28と、警報出力後の走行状況を検出する走行状況検出手段32と、走行状況検出手段32の検出結果に応じて、次回以降の警報の出力タイミングTaを調整する調整手段34と、を備える。
(もっと読む)
渋滞予測装置、経路探索装置、渋滞予測方法、経路探索方法、渋滞予測プログラム、経路探索プログラム、およびコンピュータに読み取り可能な記録媒体
【課題】渋滞予測の高精度化を図ること。
【解決手段】渋滞予測装置110は、渋滞DB111と、入力部112と、第1渋滞予測部113と、第2渋滞予測部114とを備える。渋滞DB111は、過去の渋滞に関する過去渋滞情報を蓄積したものである。入力部112は、渋滞を発生させ得る要因に関する情報(要因情報)の入力を受け付ける。第1渋滞予測部113は、要因情報で示される要因に起因して発生する渋滞を予測する。第2渋滞予測部114は、渋滞DB111および第1渋滞予測部113の予測結果(第1渋滞予測結果)を用いて、渋滞を予測する。
(もっと読む)
危険箇所回避支援装置
【課題】不意な事態が発生しても危険箇所の回避を支援できる危険箇所回避支援装置を提供する。
【解決手段】地図データおよび危険箇所データを記憶するデータ記憶部15と、現在位置を測位する測位部12と、目的地を入力する入力部11と、危険因子の危険の有無を判断する危険因子判断部13と、判断された危険因子の危険の有無に基づき、通常ルートまたは回避ルートのいずれを使用すべきかを判定する使用ルート判定部31と、通常ルートを使用すべき旨が判定された場合に、測位部12で測位された現在位置から入力部11で入力された目的地までの推奨ルートを、データ記憶部15から読み出した地図データに基づき計算する通常ルート計算部51と、回避ルートを使用すべき旨が判定された場合に、現在位置から目的地までの危険箇所を回避した推奨ルートを、データ記憶部15から読み出した地図データおよび危険箇所データに基づき計算する回避ルート計算部52を備えている。
(もっと読む)
停止義務地点学習装置及び停止義務地点学習プログラム、並びにこれを用いたナビゲーション装置
【課題】学習効率の低下を最小限に抑えつつ、停止義務情報を関連付ける交差点を適切に決定することのできる停止義務地点学習装置を提供する。
【解決手段】停止義務情報を生成して、当該停止義務情報を一時停止義務がある交差点に関連付けて記憶する停止義務地点学習装置であって、停止義務指標の画像認識を行う画像認識範囲を、各交差点を基準として設定する認識範囲設定手段と、自車位置周辺の画像情報に含まれる、停止義務指標の画像認識を行なう画像認識手段と、停止義務指標の画像認識結果に基づいて停止義務情報を生成する停止義務情報生成手段と、画像認識範囲がN個に亘って順次重複している場合に、当該N個の画像認識範囲を連続する一つの範囲である和範囲とし、当該和範囲に含まれる、画像認識に成功した停止義務指標の個数に基づいて、停止義務情報を関連付ける交差点を決定する停止義務地点決定手段と、を備える。
(もっと読む)
周辺情報表示装置および周辺情報表示方法
【課題】 施設の位置を直感的に把握できる周辺情報表示装置を提供する。
【解決手段】 周辺情報表示装置1は、車両の現在位置を検出する現在位置検出部10と、施設に関するデータを記憶した施設データ記憶部12と、車両を運転中のドライバから見て左右2つの表示領域に画像を表示する画像表示部16と、施設データ記憶部12に記憶されたデータに基づいて車両の進行経路上にある施設を求める施設検出部14と、施設検出部14にて求めた施設のデータを、車両の進行方向に向かって道路の右側にある施設については右側の表示デバイス20に表示し、道路の左側にある施設については左側の表示デバイス18に表示する表示制御部22とを備える。
(もっと読む)
運転支援装置
【課題】 車両内部の位置情報に誤差がある場合でも、運転支援が行われるか否かによって運転者に与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援ECU4は、路車間通信機1から対象交差点Cまでの距離情報と対象交差点Cに設けられた信号Sに関する信号サイクル情報を受信する。また、運転支援ECU4は、ナビゲーション装置2から経路組立情報を取受信する。運転支援ECU4では、路車間通信機1から受信した距離情報と、ナビゲーション装置2から受信した経路組立情報に含まれる距離情報に基づいて、警報装置5による警報を行うか否かの判断を異なる度合いで行う。
(もっと読む)
車両走行支援システム、路上側システム及び車両側システム
【課題】交差点を通行する通行者の条件に一切関係なく当該通行者の存在有無を適切に判定し、通行者への接触を適切に未然に回避する。
【解決手段】路上側システム2は、車両が進入しようとする交差点を路上側に設置されている路上カメラ4a〜4hが撮影し、その撮影範囲内にある通行者の移動履歴と通行者の向きと信号機13a〜13dの信号状況とを解析して通行者の進行方向及び進行速度を表す通行者進行情報を推定して車両側システム3に送信し、車両側システム3は、通行者進行情報と車両の現在位置と車両の進行方向と車速とを解析して車両が通行者に接触する可能性有無を判定して警告を出力させる。
(もっと読む)
運転者疲労度推定装置、運転者疲労度推定方法
【課題】コスト増を抑制して運転者が疲労したか否かをより正確に判定し、また、運転者の疲労をより正確に検出することができる運転者疲労度推定装置及び運転者疲労度推定方法を提供すること。
【解決手段】連続運転時間が許容運転時間を超えると、運転者の疲労軽減措置を行う運転者疲労度推定装置100において、地域ごとに高疲労地域を登録した疲労マップを記憶する疲労マップ記憶手段13と、疲労マップを参照して決定した、高疲労地域を運転した高疲労運転時間に応じて疲労度を算出する疲労度算出手段22と、疲労度算出手段22が算出した疲労度に応じて、許容運転時間を変更する基準変更手段23と、連続運転時間が許容運転時間を超えると運転者の疲労軽減措置を行うタイミングであると判定する判定手段24と、を有することを特徴とする。
(もっと読む)
361 - 380 / 804
[ Back to top ]