
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
1,821 - 1,840 / 2,058
車両制御装置
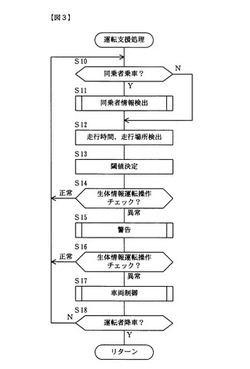
【課題】取得した生体情報に基づいて、より正確な必要性判断のもと運転支援を行う。
【解決手段】心拍等の生体情報が所定の閾値(基準値)を越えたかい否かを、警告や車両制御等の運転操作支援を行うか否かを判断するための条件とし、この生体情報の閾値を、同乗者の有無に応じて変更する。これにより、従来よりも、より正確な運転者支援を行うことができるようになる。
すなわち、一人で運転している時と、隣に上司などの普段から緊張する相手が同乗している場合とでは、通常時の生体情報が異なるため、同じ閾値で判定できない。
そこで、同乗者によって緊張度が増している場合は、その緊張度を踏まえて閾値を設定し、運転操作に対する緊張度を検出しやすくする。
(もっと読む)
情報記録装置、情報記録方法、情報記録プログラムおよびコンピュータに読み取り可能な記録媒体

【課題】移動体の走行状態を保存する記録媒体の容量を不足させることなく、最適な走行状態の保存を図ること。
【解決手段】連続的に入力されてくる移動体の走行状態に関する情報を上書き保存する情報記録装置100において、設定部101は、目的地点を設定する。算出部102は、設定部101によって設定された目的地点までの所要時間を算出する。決定部103は、移動体の挙動の検出感度を、算出部102によって算出された所要時間に応じた検出感度に決定する。検出部104は、決定部103によって決定された検出感度により移動体の挙動を検出する。そして、保存部105は、検出部104によって移動体の挙動が検出されたときの移動体の走行状態に関する情報を記録媒体に保存する。
(もっと読む)
車両運転情報表示装置
【課題】ドライバ毎の運転情報と車両全体の運転情報とを対比させて、各ドライバの相対的な関係を表示する車両運転情報表示装置を提供することを目的とする。
【解決手段】車両運転情報表示装置1は、車両を運転するドライバを識別するドライバ識別手段20と、ドライバ識別手段20により識別されたドライバ毎の運転情報と車両全体の運転情報とを処理する運転情報処理手段21と、運転情報処理手段21により処理された、少なくとも1つの前記ドライバ毎の運転情報と前記車両全体の運転情報とを対比させて表示する運転情報表示手段22とを備える。
(もっと読む)
携帯表示装置
【課題】装置筐体とは別個の操作部を必ずしも必要としない携帯表示装置について、加速度の検出だけでは筐体移動による表示制御が正確にできない状況であっても、筐体移動により表示内容の操作を正確に行うことができ、かつ、インタフェースを意識させることのない自然な操作感で表示内容の操作ができるようにする。
【解決手段】移動量演算部3が、加速度計測部1による計測結果と、外側用カメラ部21による撮影画像とを互いに補正するように用い、装置筐体の3次元的変位量を算出することにより、装置筐体の3次元的変位量をより的確に算出する。こうして装置筐体の3次元的変位量から、移動量演算部3が表示部5に表示される地図の表示位置の移動量および移動方向を算出し、表示制御部4は、その移動量および移動方向に応じて、表示部5に表示される地図の表示位置をスクロールして移動させる。
(もっと読む)
道路情報更新装置
【課題】精度よく地図データの更新を行うことができる道路情報更新装置を提供する。
【解決手段】自車両が地図データ格納部25に格納された地図データ上の道路を走行していない場合に、GPS受信機10や車両情報取得部12から取得した新規道路情報と、画像情報取得部13から取得した実際の道路の画像とを記憶部27に記録する。車両の停車後イグニッションがオフとなる前に、入力支援部26は、記憶部27に記録された新規道路情報と、実際の道路の画像とを表示部30を通じて使用者に提示し、地図データの更新処理を促す。使用者は表示部30に提示された情報と画像とを見ながら地図データの変更を行うことができ、地図データ更新の信頼性を向上させることができる。
(もっと読む)
沿道情報の確度を判断して自動操舵制御を行う車輌
【課題】白線によるガイドライン等のカメラ等による読み取りにより得られる沿路情報に基づく車輌の自動操舵制御を高い安全性の下に実行する車輌を提供する
【解決手段】道路に沿って装備された情報源を車輌に装備された情報読取り装置により読み取ることにより得られる沿路情報に基づいて自動操舵制御を行う車輌に於いて、沿路情報の確度を道路地図提供手段が提供する道路地図情報に基づいて判断し、該確度が所定の基準に適合しないときには、沿路情報に基づく自動操舵制御を行わないようにする。
(もっと読む)
自動ランドマーク情報作成方法及びシステム
【課題】立体画像によるビジュアルなランドマークを自動生成し、地図上の所定位置に配置させることのできる自動ランドマーク情報作成方法及びシステムを提供する。
【解決手段】対象物を複数の方向から撮像した撮像画像を用いて立体画像からなるランドマークを生成し、この生成したランドマークを地図上の所定位置に配置させる際に、特定の場所から特定の方向に向けて撮像した対象物の撮像画像を複数枚用い、該複数の撮像画像から対象物の外観形状を特定する形状設定ステップと、この形状設定ステップで求めた外観形状からランドマークを生成するランドマーク生成ステップと、複数の撮像画像から対象物の位置を検出する位置設定ステップと、地図上における検出した対象物の位置に、生成したランドマークを配置するランドマーク配置ステップと、を有してランドマーク情報を自動形成する。
(もっと読む)
車両の移動距離検出方法、車両の移動距離検出装置、車両の現在位置検出方法及び車両の現在位置検出装置
【課題】車速センサからのパルス信号が出力されなくなっても、精度良く移動距離及び現在位置を検出することができる車両の移動距離検出方法、車両の移動距離検出装置、車両の現在位置検出方法及び車両の現在位置検出装置を提供する。
【解決手段】車速センサのパルス信号に基づいて求めた車両の車速Vnが基準車速Vk以上の時、車速センサのパルス信号に基づいて移動距離DMを求める(ステップS1−2、S1−3)。車両が前記基準車速Vk未満の時、後方カメラで異なる時間に撮像した複数の画像データGのパターンQ1、Q2を取得し、そのパターンQ1、Q2に基づいて移動距離DMを求める(ステップS1−6〜ステップS1−14))ようにした。
(もっと読む)
運転支援装置
【課題】駐車していた車両を発進させる際に、ステアリングホイールの回転角度が所定回転角度になっている場合、運転者に対して操舵(だ)輪の向きを報知することによって、運転者は操舵輪の向きを適確に把握することができ、不安を感じることがなく、容易に、かつ、安全に運転を行うことができるようにする。
【解決手段】車両の情報を取得する情報取得部と、前記車両の運転者に対して所定の情報を報知する情報報知部と、前記情報取得部が取得した車両のステアリングホイールの回転角度に基づいて操舵輪の向きを算出する演算処理部とを有し、前記ステアリングホイールの回転角度が基準位置からの所定回転角度である場合に、前記情報報知部は操舵輪の向きを運転者に対して報知する。
(もっと読む)
車両用データ要否判定装置、車両用データ報知装置および路側通信機
【課題】利用者が必要と考えられるときに即座にデータを確保できるようにした
【解決手段】制御部は、車両が通信可能領域に進入すると共に、この車速が所定速度以下であることを条件として通信確立して路側通信機から配信されるデータを受信し(S1〜S3)、車両が店舗エリア内に進入したことを条件としてデータ確保して表示部に対して表示制御し(S10)、所定時間経過したとしても店舗エリア外に位置していると判定したことを条件としてデータ破棄する(S7〜S9)。
(もっと読む)
ナビゲーション装置
【課題】 異なるユーザ毎であってもユーザ毎にあわせたデュアルビュー表示の操作を行うことができるビゲーション装置を提供する。
【解決手段】 デュアルビュー表示が可能なディスプレイを有するナビゲーション装置において、操作者を操作者特定手段によって特定することで左右各画面に対象操作者に従った画面を表示することができ、特に、車両に搭載されたナビゲーション装置は、運転席側、助手席側とでナビゲーション装置の操作が行える機能(範囲)が異なるため、操作者を特定することができることで、ナビゲーション装置の操作性を向上させる。
(もっと読む)
通信端末、情報表示方法、情報表示プログラムおよび記録媒体
【課題】それぞれの端末において取得可能な映像データを有効に活用すること。
【解決手段】第1の通信端末110および第2の通信端末120は、相互に通信可能な複数の通信端末からなる通信ネットワーク内の通信端末である。第1の通信端末110は、受信部111、表示部112、表示制御部113、送信部114によって構成される。受信部111は、第2の通信端末120によって取得されたデータの取得地点および当該データの取得時刻に関する情報を受信する。表示部112は、表示画面を有する。表示制御部113は、表示画面を制御して、受信部111によって受信された取得時刻に関する情報に基づいて、取得地点に関する情報を表示する。送信部114は、表示制御部113によって取得地点に関する情報が表示された場合、データの送信要求信号を第2の通信端末120に送信する。
(もっと読む)
標識表示装置
【課題】 走行中に運転者が道路標識を見落とすことを確実に防止することができる標識表示装置を提供する。
【解決手段】 走行中にスルー画撮影を行なうカメラ部11が、撮像部11_1からのアナログ画像信号をディジタル画像信号にA/D変換するA/D変換部11_2と、デジタルの画像信号を処理する信号処理部11_3と、信号処理部11_3からの画像データを格納するメモリ11_4と、撮像部11_1を駆動するためのタイミング信号を出力するタイミング信号発生部11_5と、標識表示装置10全体を制御するシステム制御部11_6とを備え、そのカメラ部11により得られた画像から道路標識を標識抽出部12で抽出し、抽出された道路標識を標識表示部13に一定時間表示する。
(もっと読む)
車両用ナビゲーション装置
【課題】ナビゲーション機能に影響を及ぼすことを抑制しつつ、車両の周辺に存在する物体の画像を表示させる車両用ナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置1を構成する制御回路2の映像分析/距離検出部2aは、車外カメラ15によって撮像された車両周辺の画像を処理することで周辺に存在する他車両などの物体を抽出し、制御回路2は、ユーザたる運転者に車両周辺の状況を報知することが適切であると判断される条件が成立した場合のみ、表示装置5に表示される地図画像に、映像分析/距離検出部2aによって抽出された物体の画像を重畳して表示させる。
(もっと読む)
振動情報呈示部品及びナビゲーション装置、車線逸脱警告装置
【課題】二輪車などの移動機器運転者に対して、運転行為自体に重要な役割を担う視聴覚的注意を奪わずに経路案内情報および車線逸脱警告情報を左右情報の区別を明確、かつ確実に呈示する。
【解決手段】移動機器の運転操作ハンドルバー106付随の左右グリップ103R、103L内部、または左右両膝で挟み込むタンク側面部分などに設置した左右パッド503R、503L内部に振動子105L、105R、505L、505Rおよび接触検知センサ104L、104R、504L、504Rを内蔵する。ナビゲーション装置または車線逸脱警告装置は接触検知センサの検知結果を用いて、身体に振動が伝えられるか否かによって振動子を駆動制御し、運転者の視聴覚的注意を奪わずに、かつ確実に情報呈示を行う。
(もっと読む)
車両認識方法及び車載装置
【課題】周辺の車両に関する情報を取得する処理を軽減することができる車両認識方法及び車載装置を提供する。
【解決手段】運転支援装置1のCPU2は、車両に設けられた周辺監視カメラ20から周辺撮像データを取得する。また、画像プロセッサ10は、周辺撮像データ内で、隣接車線領域を設定し、隣接車線領域内に認識部分枠を設定する。さらに、画像プロセッサ10は、認識部分枠内の輝度データと、後方監視カメラ21により撮像された後方撮像データのサンプル枠内の輝度データとを比較し、路面上の物体を検出する。そして、検出物ありと判断された認識部分枠とその周辺に対し、エッジ検出を行って、他車両を認識する。
(もっと読む)
関心度提供装置、携帯情報端末、サーバ装置および関心度提供方法
【課題】多くの人の関心の対象となっている関心度の高い場所等を客観的かつ正確に把握し、これを通知できるようにする。
【解決手段】携帯通信端末100のそれぞれは、ユーザが歩行状態から停止状態に遷移した場合に、これを最寄りの無線LANスポット200を通じてサーバ装置300に送信する。このとき、無線LANスポット200の位置情報などを含めてサーバ装置300に送信する。サーバ装置300はこれを集計して、多くの携帯通信端末100のユーザが滞留している場所を把握し、これを情報の提供を要求してきた携帯通信端末100に無線LANスポット200を通じて配信する。
(もっと読む)
車載通信装置及び車両間通信システム
【課題】各車両が自車の情報を周辺車両に同報することができる車載通信装置及び車両間通信システムを提供すること。
【解決手段】車載通信装置10は、車両が交差点エリア及び道路エリアのいずれにあるかを判定するエリア判定手段11と、車両の進行方向及び車両が存在するエリアに応じて無線信号の周波数チャネルを設定する周波数チャネル設定部12と、無線信号によって車両間の無線通信を行う無線通信部13とを備え、エリア判定手段11は、地図データを記憶する地図データ記憶部11aと、車両の現在位置を検出する現在位置検出部11bと、交差点エリアへの車両の流入出を判定する交差点エリア流入出判定部11cとを備える。
(もっと読む)
ナビゲーション装置
【目的】ドライバが必要とする地点のリアルタイム画像を自動的に取得して表示する「ナビゲーション装置」を提供することである。
【構成】所定の地点の風景を撮影するカメラC1,C2を特定するカメラ特定データと該カメラが撮影した映像を提供する映像提供元の電話番号を記憶し、いずれかのカメラが撮影した映像を表示する情況になったとき、該カメラを特定し、該特定されたカメラが撮影した映像の提供元電話番号を取得し、該映像提供元に発呼してカメラで撮影したライブ映像を取得して地図と共に表示する。たとえば、外部より提供される道路交通情報が特定する混雑道路であって目的地への誘導経路GR上の道路に設置されたカメラC1が撮影したライブ画像および混雑道路を迂回する迂回道路RDP上に設置されたカメラC2が撮影したライブ画像を表示して、ドライバの道路選択の参考にさせる。
(もっと読む)
位置評定装置、位置評定方法および位置評定プログラム
【課題】 都市部などGPSの衛星補足数が十分確保できない条件下でも測位精度の劣化を防ぐことを目的とする。
【解決手段】 天空画像カメラ部110が撮影して撮像データを生成し、天空画像変換部120が撮像データを仰角・方位角面に投影する。また、DSM取得部140が各地点において天空画像カメラ部110が撮影するであろう範囲の地理データをDSMデータベース190から取得し、DSM変換部150が地理データを仰角・方位角面に投影する。そして、位置・姿勢推定部160が仰角・方位角面に投影した撮像データと各地点における地理データとを比較し、地理データが撮像データと一致する地点を天空画像カメラ部110の撮影時の位置評定装置100の位置とする。
(もっと読む)
1,821 - 1,840 / 2,058
[ Back to top ]