
Fターム[2G024CA12]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | 測定項目 (1,868) | トルク (82)
Fターム[2G024CA12]に分類される特許
1 - 20 / 82
トランスミッション試験装置
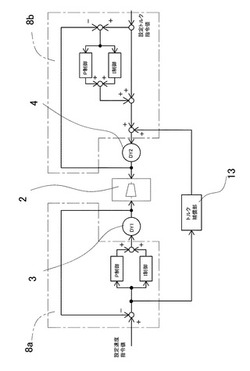
【課題】装置全体で駆動用ダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供する。
【解決手段】駆動用・吸収用ダイナモメータ3,4を有し、駆動用ダイナモメータ3側には速度検出部が、また吸収用ダイナモメータ4側にはトルク検出部が配置されている。これらダイナモメータ3,4の制御部は速度フィードバック指令部8aとトルクフィードバック指令部8bとトルク補償部13とからなっている。速度フィードバック指令部8aは駆動用ダイナモメータ3の速度を、またトルクフィードバック指令部8bは吸収用ダイナモメータ4の負荷を制御している。トルク補償部13は、駆動用ダイナモメータ3に生じる速度偏差から補償トルク指令値を得て吸収用ダイナモメータ4に与えている。
(もっと読む)
ねじの任意負荷荷重試験装置

【課題】 従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【解決手段】 電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることとする。
(もっと読む)
供試体のトルク測定に用いるモータ
【課題】設置スペースを広くとる必要がなく、トルクを測定するための構成が簡単な、トルク測定に用いるモータを提供する。
【解決手段】ケーシング1と、前記ケーシング1の内径側に固定されたステータ2と、前記ステータ2の内径側に当該ステータ2に対して回転可能に設けられたロータ3と、前記ロータ3と一体的に回転する駆動軸4とを備え、前記駆動軸4は、供試体が有する回転軸に対して接続可能とされ、前記ケーシング1は、前記駆動軸4の回転により当該ケーシング1に発生する周方向への変位を検出可能な変位検出手段5を備える。
(もっと読む)
噛み合い起振力の測定方法
【課題】ギヤの噛み合い時に生じる噛み合い起振力を正確に評価する。
【解決手段】駆動ギヤ21と、駆動ギヤ21と噛み合うことで回転する従動ギヤ22と、従動ギヤ22と噛み合う固定ギヤ24とを有するギヤユニット20において生じる噛み合い起振力Fを測定するに際し、固定ギヤ24の側に、固定ギヤ24に作用した荷重を測定可能な荷重測定手段12を配設し、駆動ギヤ21と従動ギヤ22との噛み合い回転により噛み合い起振力Fが生じた際に、従動ギヤ22を介して固定ギヤ24に作用する荷重f’を荷重測定手段12で測定する。そして、予め取得しておいた噛み合い起振力Fと荷重f’との関係を用いて、荷重測定手段12で測定した荷重f’から噛み合い起振力Fを算出する。
(もっと読む)
トランスミッションの出力検査装置
【課題】出力軸との連結作業を円滑に行うことで、出力検査を適正かつ低コストに行うことのできるトランスミッションの出力検査装置を提供する。
【解決手段】トランスミッションの出力検査装置10は、トランスミッション11の入力軸に連結される入力用モータ12と、出力軸13に連結される連結軸14と、連結軸14に設けられ、出力状態を検出する出力状態検出手段15,16と、連結軸14に設けられ、出力軸13に負荷を与えるブレーキ17と、連結軸14をその中心軸線まわりに回転させることで、出力軸13と連結軸14との連結部分に設けられたスプライン嵌合部18,19の位相合わせを行う位相合わせ手段20とを具備する。位相合わせ手段20は、連結軸14の外周に設けられた複数の歯部27と、歯部27と係合して、連結軸14を回転させる向きに歯部27を押動可能な押動部28と、押動部28を直線駆動させる直線駆動部29とで構成されている。
(もっと読む)
減速機異常診断装置および減速機異常診断方法
【課題】繰り返しの定型動作を行わず、動作が時々刻々と変化する場合であっても、動作内容に関係なく減速機の異常診断を行うことができる減速機異常診断装置を提供する。
【解決手段】モータ110の出力軸111の回転角度範囲内で複数設定された観測点を記憶した観測点設定記憶部241と、出力軸111の回転角が観測点のいずれかに一致するごとに、その観測点におけるモータトルクと減速後トルクとの比をトルク伝達効率として算出するトルク伝達効率算出部253と、算出されたトルク伝達効率と正常時データ値とのマハラノビス距離を算出するマハラノビス距離算出部262と、算出されたマハラノビス距離を所定閾値と対比してマハラノビス距離が所定閾値を超えた場合に異常判定を行う異常判定部263と、を備える。
(もっと読む)
評価ベンチのブレーキトルク算出方法
【課題】トランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる評価ベンチのブレーキトルク算出方法を提供すること。
【解決手段】プラネタリギヤ25を介して接続されたモータジェネレータMG1,MG2を備えるトランスアクスル20の入力側及び出力側にそれぞれダイナモ12,14を接続し、各ダイナモ12,14によりモータジェネレータMG,MG2を回転させて性能評価を行う評価ベンチ10を停止させる際のブレーキトルクk1,k2を算出する方法において、プラネタリギヤ25に関する運動方程式に基づき、各ブレーキトルクk1,k2に関する伝達関数を導出して、ダイナモ12,14の各回転数と停止時間t1とから、ダイナモ12,14及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2を算出する。
(もっと読む)
回動操作具の荷重変位特性測定装置および荷重変位特性測定方法
【課題】快適な操作性を確保する安定した品質を実現するために、回動操作具の荷重変位特性を簡易かつ精度よく測定する。
【解決手段】回動して操作されるレバー200の荷重変位特性を測定する荷重変位特性測定装置であって、レバー200に固定されるクランプ102と、クランプ102に回転自在に接続されたロッド104と、ロッド104の回転角を検出する回転角計114と、ロッド104を移動させるアクチュエータ110と、アクチュエータ110の駆動軸112の移動量を検出する駆動軸変位計116と、ロッド104の軸力を検出する荷重センサ106とを備えたことを特徴とする。
(もっと読む)
同期電動機駆動回転機械及びその寿命評価方法
【課題】
同期電動機駆動回転機械の寿命予測を信頼性が高く且つ容易に行う。
【解決手段】
回転機械3は同期電動機2により駆動される。同期電動機と回転機械を接続する軸の軸トルクを検出する軸トルク検出手段7が設けられ、検出された信号は、軸トルク信号処理手段9で軸トルク振幅値に換算される。同期電動機始動時の同期電動機が発生する変動トルクの周波数が回転機械のねじり固有振動数と共振する共振点における軸トルク振幅値の停留点での軸トルク振幅値と、前記停留点から任意時間経過後の前記共振点付近での軸トルク振幅値の停留点での軸トルク振幅値とから、前記共振点付近での軸トルク振幅値の包絡線を演算器11で演算する。前記包絡線と、応力と材質の寿命回数の関係に基づいて、軸トルク振幅値の包絡線を無限時間積分して等価な繰返し回数を演算し、回転機械の寿命を予測する演算手段11を備えている。
(もっと読む)
電気機械装置の特性測定装置及び測定方法
【課題】電気機械装置のトルクやその他の特性を簡便に測定する。
【解決手段】電動モーターの特性測定装置であって、予め特性が既知である負荷モーターと、前記負荷モーターと被測定モーターのローターとを接続するカップリングと、前記被測定モーターに負荷トルクを与えるために、前記負荷モーターの動作を制御する負荷モーター制御部と、前記負荷モーターの回転数と、前記負荷モーターに流れる電流とから、前記負荷モーターが前記被測定モーターに与える負荷トルクを算出する負荷トルク算出部と、前記負荷トルクが前記負荷モーターに与えられたときの前記被測定モーターの電流と回転数とを測定する測定部と、前記負荷トルクと被測定モーターの電流と回転数とを用いて前記被測定モーターのトルク−回転数特性と、トルク−電流特性と、を取得する特性取得部と、を備える。
(もっと読む)
電動弁の診断方法
【課題】簡易且つ迅速に高精度で信頼性の高い診断結果を得ることができる電動弁の診断方法を提案する。
【解決手段】基準時の電流に対応する電気信号を直交座標のX軸又はY軸に、出力トルクをY軸又はX軸に表示して該電気信号と出力トルクとの相関を図表化した曲線であって、電気信号に対応するX軸又はY軸に平行に延びる線分L1と該線分L1の先端位置からX軸又はY軸に対して所定の傾きをもって延びる線分L2からなる基準状態における入出力曲線と、次回以降の測定における電流に対応する電気信号を直交座標のX軸又はY軸に、出力トルクをY軸又はX軸に表示して該電気信号と出力トルクとの相関を図表化した曲線であって、電気信号に対応するX軸又はY軸に平行に延びる線分L1と該線分L1の先端位置からX軸又はY軸に対して所定の傾きをもって延びる線分L2からなる次回以降の入出力曲線を対比することで電動弁の診断を行う。
(もっと読む)
電気機械の軸受の熱異常の診断
【課題】軸受メタル温度(BMT)を評価して、電気機械のロータミスアライメントおよび/または軸受ワイプを診断するシステムおよび方法を提供する。
【解決手段】タービン(12)に近接して位置する第1のBMTセンサ、および発電機(10)に近接して位置する第2のBMTセンサから軸受メタル温度(BMT)示度を得ると共に、潤滑油入口温度、速度およびパワーを含む動作データを得るための入力システムと、不良の入力データを除去するフィルタシステムと、BMTセンサの一方が温度の増加を報告し、他方のBMTセンサが温度の減少を報告していることに応答してミスアライメントの警告を発するミスアライメント解析システムとを含む第1のシステム。
(もっと読む)
試験装置
【課題】パワーステアリング装置の耐久試験を効率良く行える試験装置を提供する。
【解決手段】試験装置100は、ステアリングホイール20に回転力を入力するモータ10と、ピニオン26に作用する捩りトルクを検出するトルクセンサ11と、モータ10の回転角を検出する角度センサ12と、ステアリングホイール20が、右に切られ、捩りトルクが右側第1トルクとなった場合の回転角を右の第1角度として記憶し、左に切られ、捩りトルクが左側第1トルクとなった場合の回転角を左の第1角度として記憶し、更に右に切られ、捩りトルクが右側第2トルクとなった場合の回転角を右の第2角度として記憶し、更に左に切られ、捩りトルクが左側第2トルクとなった場合の回転角を左の第2角度として記憶する試験条件設定部40と、モータ10の回転角を右の第2角度と左の第2角度とに亘って繰り返し変更して耐久試験を行う試験実行部50と、を備える。
(もっと読む)
可変プーリのバックラッシュ測定装置
【課題】 簡易な構成で正確に可変プーリのバックラッシュを測定することができる可変プーリのバックラッシュ測定装置を提供する。
【解決手段】 可変プーリのバックラッシュを測定する装置であって、プーリシャフト3を回転自在の状態で垂直に支持する受け治具11と、この受け治具11に支持されたプーリシャフト3に嵌合する可動プーリ5を固定保持する保持手段12と、垂直に支持されたプーリシャフト3の上端部3aに固設され、上部13aに四角形の嵌合穴25を有するアダプタ13と、このアダプタ13の上部13aを中空軸14bに嵌合し、アダプタ13を介してプーリシャフト3の回動量を検出するエンコーダ14と、このエンコーダ14のケース体14aを回転不能に押圧固定する押圧手段15と、アダプタ13の嵌合穴25に嵌合してプーリシャフト3に正逆方向のトルクを付加するトルクレンチ16を備える。
(もっと読む)
負荷装置
【課題】発生音が小さく、回転負荷が任意に設定できる負荷装置を提供する。
【解決手段】回転機械2に接続される回転体3と、回転体3を収容するハウジング4と、ハウジング4内に満たされた流体5と、流体5と回転体3との摩擦力を変化させることによって回転機械2に加わる回転負荷を変化させる摩擦力可変手段とを備え、回転体3は、同軸で一体回転する複数の回転円板52を有すると共に、摩擦力可変手段は、回転円板52間の距離を変化させることにより回転負荷を変化させる距離可変手段を有する。
(もっと読む)
作業検査システム
【課題】作業者の負担を軽減させることができ、かつ作業の検査ミスが生じる可能性をなくすことができる作業検査システムを提供すること。
【解決手段】作業の対象となる作業領域1及び作業具6を撮影する撮影手段7と、撮影手段7により撮影された画像に基づいて作業領域1内の作業具6の作業位置を特定する作業位置特定手段8と、作業具6が作業したことを検出する作業状況検出手段8と、作業状況検出手段8が作業具6の作業を検出したときに作業位置特定手段8により特定された作業位置を作業完了位置として作業領域1の画像と対応付けて記録する記録手段8と、作業完了位置が対応付けられた作業領域1の画像を表示する画像表示手段8と、を備える。
(もっと読む)
動力循環式試験装置
【課題】運転中にトルクを変化させることができると共に、トルク抜けが防止され安定してトルクを負荷することの可能な動力循環式試験装置を提供する。
【解決手段】第1低速回転部22Aの軸内部には、ロータリーアクチュエータ40が配置されている。ロータリーアクチュエータ40は、油圧式モータを用いて構成され閉鎖動力循環路12にトルクを負荷するものであり、油圧サーボバルブ42により、出力トルクが制御されている。ロータリーアクチュエータ40は、減速機構50を介して第2低速回転部22Bと連結されている。
(もっと読む)
自動車のパワートレインの試験装置
【課題】タイヤの影響を考慮したパワートレインの単独試験を可能とする。
【解決手段】ベース1に対して前後に移動可能に設けたステージ12上には、試験対象となるパワートレイン100が、タイヤ101が連結された状態で搭載される。ベース1の内部のアクチュエータ21で、ステージ12の下部を押し引きすることにより、タイヤ101の、ローラ2の周面に対する押圧力は制御される。ローラ2のローラシャフト3には、ローラモータ7が連結されている。また、ローラシャフト3に加わる軸回り(捻れ方向)のトルクを検出するローラ軸トルク計5、ローラシャフト3の回転速度を検出するローラ回転計6が設けられている。
(もっと読む)
ギヤ伝達効率測定装置および測定方法
【課題】ギヤ噛合部の噛合伝達効率を正確に迅速に測定でき、測定対象のギヤセットが制限されず、簡素なギヤ伝達効率測定装置を提供する。
【解決手段】駆動ギヤ82が着脱可能な入力軸81および入力軸受部83と、従動ギヤ87が着脱可能な出力軸86および出力軸受部88とで構成されたギヤセット8を測定対象とし、入力および出力トルク検出手段30、35と、検出されたトルクから伝達効率を求める伝達効率算出手段38と、入力軸受部および出力軸受部に発生する分力を検出する分力検出手段40、45と、駆動ギヤと従動ギヤとを噛合させる実働モードM1および入力軸と出力軸とを連結する軸直結モードにギヤセット8を配置変換する配置変換手段2と、実働モードで入力軸受部および出力軸受部に発生する実働時分力を把握する分力把握手段と、軸直結モードで入力軸受部および出力軸受部に実働時分力に相当する相当荷重を加える荷重加圧手段と、を備える。
(もっと読む)
動力系の試験装置及びその制御方法
【課題】応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
(もっと読む)
1 - 20 / 82
[ Back to top ]